A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 7
Issue 3
Volume 7
Issue 3
IEEE/CAA Journal of Automatica Sinica
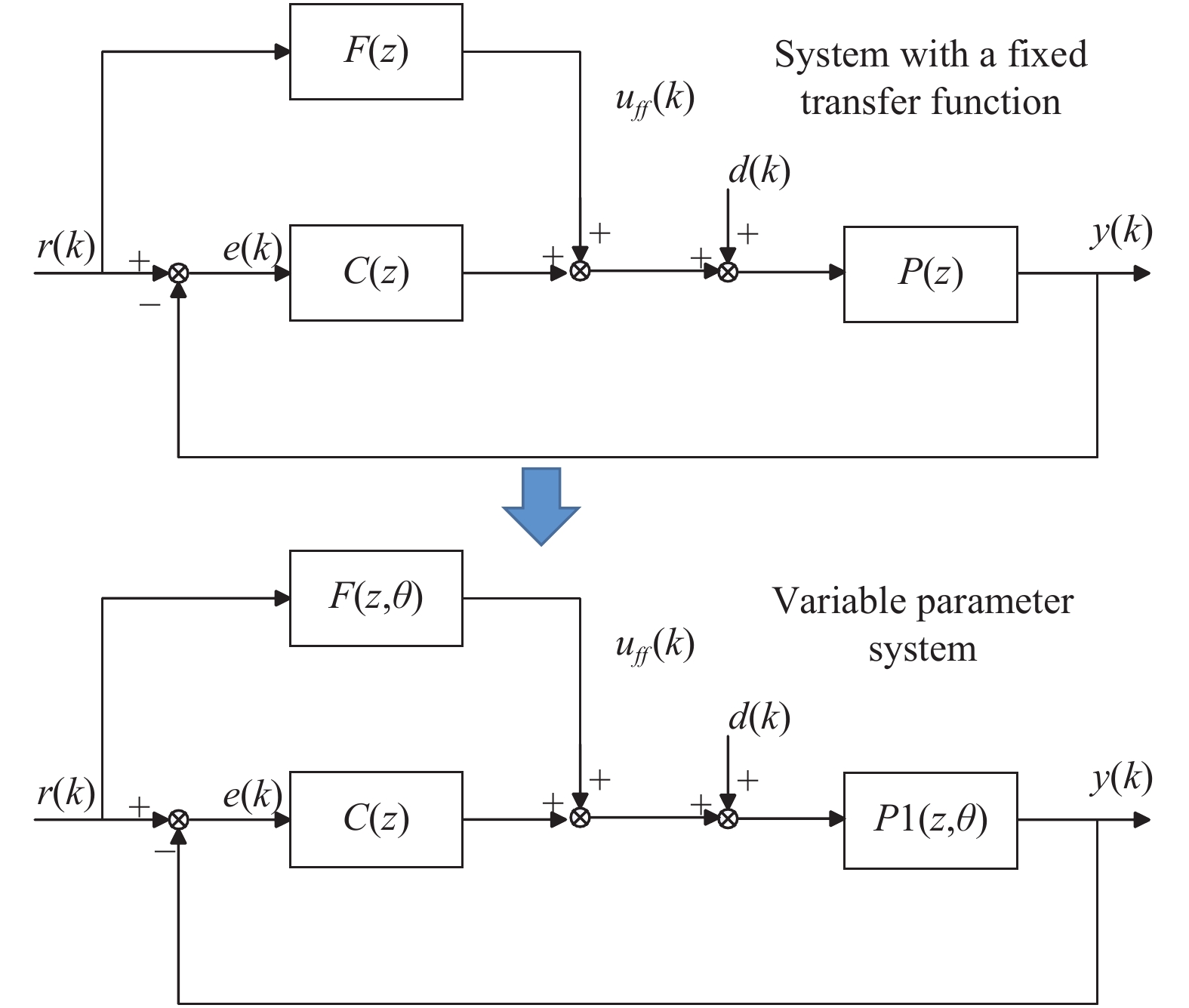
| Citation: | Dailin Zhang, Zining Wang and Masayoshi Tomizuka, "A Variable-Parameter-Model-Based Feedforward Compensation Method for Tracking Control," IEEE/CAA J. Autom. Sinica, vol. 7, no. 3, pp. 693-701, May 2020. doi: 10.1109/JAS.2020.1003135

|

| [1] |
S. Zhao and K. K. Tan, “Adaptive feedforward compensation of force ripples in linear motors,” Control Engineering Practice, vol. 13, no. 9, pp. 1081–1092, Sep. 2005. doi: 10.1016/j.conengprac.2004.11.004
|
| [2] |
P. Van Den Braembussche, J. Swevers, H. Van Brussel, and P. Vanherck, “Accurate tracking control of linear synchronous motor machine tool axes,” Mechatronics, vol. 6, no. 5, pp. 507–521, Aug. 1996. doi: 10.1016/0957-4158(95)00090-9
|
| [3] |
M. Heertjes, D. Hennekens, and M. Steinbuch, “MIMO feed-forward design in wafer scanners using a gradient approximation-based algorithm,” Control Engineering Practice, vol. 18, no. 5, pp. 495–506, May 2010. doi: 10.1016/j.conengprac.2010.01.006
|
| [4] |
Y. Jiang, Y. Zhu, K. M. Yang, C. X. Hu, and D. D. Yu, “A data-driven iterative decoupling feedforward control strategy with application to an ultraprecision motion stage,” IEEE Trans. Industrial Electronics, vol. 62, no. 1, pp. 620–627, Jan. 2015.
|
| [5] |
Y. Gu and R. Ding, “A least squares identification algorithm for a state space model with multi-state delays,” Applied Mathematics Letters, vol. 26, no. 7, pp. 748–753, Jul. 2013. doi: 10.1016/j.aml.2013.02.005
|
| [6] |
X. Y. Ma and F. Ding, “Recursive and iterative least squares parameter estimation algorithms for observability canonical state space systems,” J. Franklin Institute, vol. 352, no. 1, pp. 248–258, Jan. 2015. doi: 10.1016/j.jfranklin.2014.10.024
|
| [7] |
M. Ruderman and T. Bertram, “Feed-forward compensation of hysteresis compliance using inverse Preisach model,” IFAC Proceedings, vol. 42, no. 6, pp. 243–248, 2009. doi: 10.3182/20090616-3-IL-2002.00042
|
| [8] |
F. Boeren, T. Oomen, and M. Steinbuch, “Iterative motion feedforward tuning: a data-driven approach based on instrumental variable identification,” Control Engineering Practice, vol. 37, pp. 11–19, Apr. 2015. doi: 10.1016/j.conengprac.2014.12.015
|
| [9] |
D. Wang, F. C. Liao, and M. Tomizuka, “Adaptive preview control for piecewise discrete-time systems using multiple models,” Applied Mathematical Modelling, vol. 40, no. 23–24, pp. 9932–9946, Dec. 2016. doi: 10.1016/j.apm.2016.06.046
|
| [10] |
D. A. Bristow, M. Tharayil, and A. G. Alleyne, “A survey of iterative learning control,” IEEE Control Systems Magazine, vol. 26, no. 3, pp. 96–114, Jul. 2006. doi: 10.1109/MCS.2006.1636313
|
| [11] |
H. Stearns, F. Benjamin, and M. Tomizuka, “Iterative identification of feedforward controllers for iterative learning control,” IFAC Proceedings Volumes, vol. 42, no. 16, pp. 203–208, 2009. doi: 10.3182/20090909-4-JP-2010.00036
|
| [12] |
W. J. Chen and M. Tomizuka, “Dual-stage iterative learning control for mimo mismatched system with application to robots with joint elasticity,” IEEE Trans. Control Systems Technology, vol. 22, no. 4, pp. 1350–1361, Jul. 2014. doi: 10.1109/TCST.2013.2279652
|
| [13] |
M. M. G. Ardakani, S. Z. Khong, and B. Bernhardsson, “On the convergence of iterative learning control,” Automatica, vol. 78, pp. 266–273, Apr. 2017. doi: 10.1016/j.automatica.2016.12.030
|
| [14] |
J. Bolder and T. Oomen, “Rational basis functions in iterative learning control-With experimental verification on a motion system,” IEEE Trans. Control Systems Technology, vol. 23, no. 2, pp. 722–729, Mar. 2015. doi: 10.1109/TCST.2014.2327578
|
| [15] |
D. Y. Meng and K. L. Moore, “Robust iterative learning control for nonrepetitive uncertain systems,” IEEE Trans. Autom. Control, vol. 62, no. 2, pp. 907–913, Feb. 2017. doi: 10.1109/TAC.2016.2560961
|
| [16] |
C. X. Hu, Z. P. Hu, Y. Zhu, Z. Wang, and S. Q. He, “Model-data driven learning adaptive robust control of precision mechatronic motion systems with comparative experiments,” IEEE Access, vol. 6, pp. 78286–78296, Dec. 2018. doi: 10.1109/ACCESS.2018.2884947
|
| [17] |
M. C. Jorge, S. Víctor, and M. V. Javier, “Adaptive control schemes applied to a control moment gyroscope of 2 degrees of freedom,” Mechatronics, vol. 57, pp. 73–85, Feb. 2019. doi: 10.1016/j.mechatronics.2018.11.011
|
| [18] |
M. S. Mahmoud and M. O. Oyedeji, “Adaptive and predictive control strategies for wind turbine systems: a survey,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 2, pp. 364–378, Mar. 2019. doi: 10.1109/JAS.2019.1911375
|
| [19] |
M. Tomizuka, “Zero phase error tracking algorithm for digital control,” J. Dynamic Systems Measurements &Control, vol. 109, no. 1, pp. 65–68, Mar. 1987.
|
| [20] |
M. Guay and D. Dochain, “A proportional-integral extremum-seeking controller design technique,” Automatica, vol. 77, pp. 61–67, Mar. 2017. doi: 10.1016/j.automatica.2016.11.018
|
| [21] |
S. W. Yu and M. Tomizuka, “Performance enhancement of iterative learning control system using disturbance observer,” in Proc. IEEE/ASME Int. Conf. on AIM, pp. 987–992, 2009.
|
| [22] |
C. Zhang, G. F. Ma, Y. C. Sun, and C. J. Li, “Observer-based prescribed performance attitude control for flexible spacecraft with actuator saturation,” ISA Trans., vol. 89, pp. 84–95, Jun. 2019. doi: 10.1016/j.isatra.2018.12.027
|
| [23] |
D. L. Zhang, Y. H. Niu, L. T. Sun, and M. Tomizuka, “A position-based friction error model and its application to parameter identification,” IEEE Access, vol. 7, pp. 7759–7767, Jan. 2019.
|
Figures(5)






 DownLoad:
DownLoad: