A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 7
Issue 1
Volume 7
Issue 1
IEEE/CAA Journal of Automatica Sinica
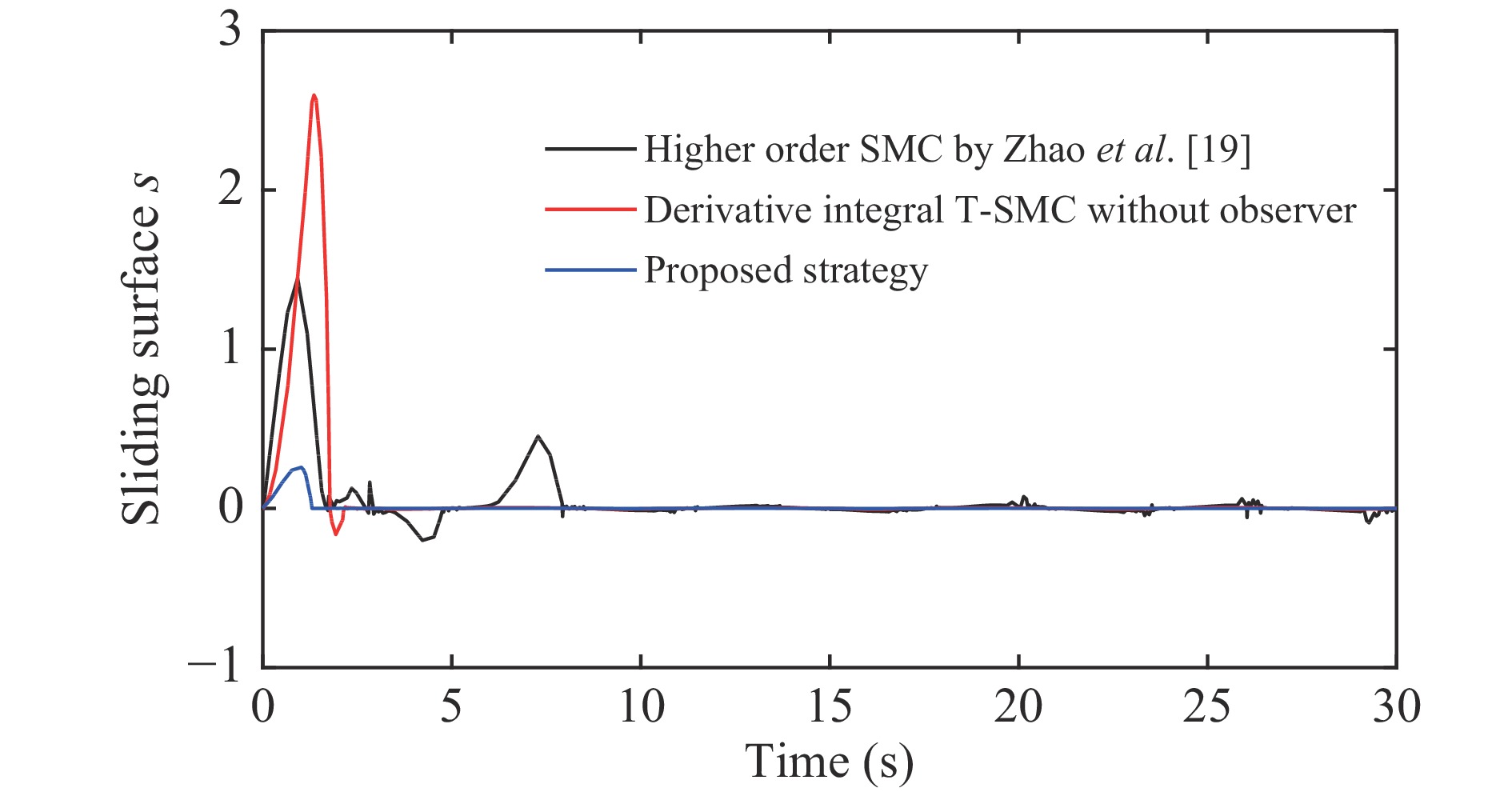
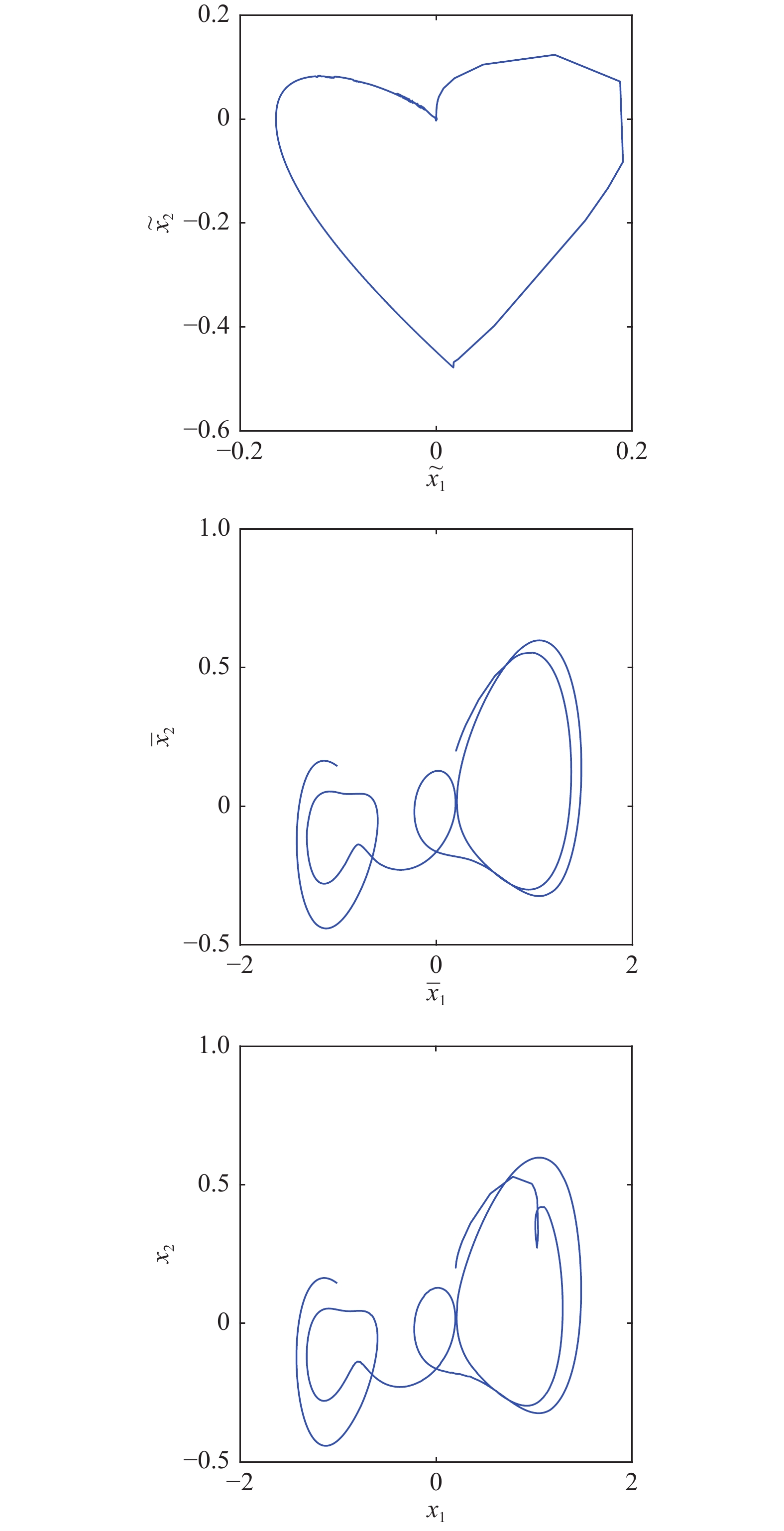
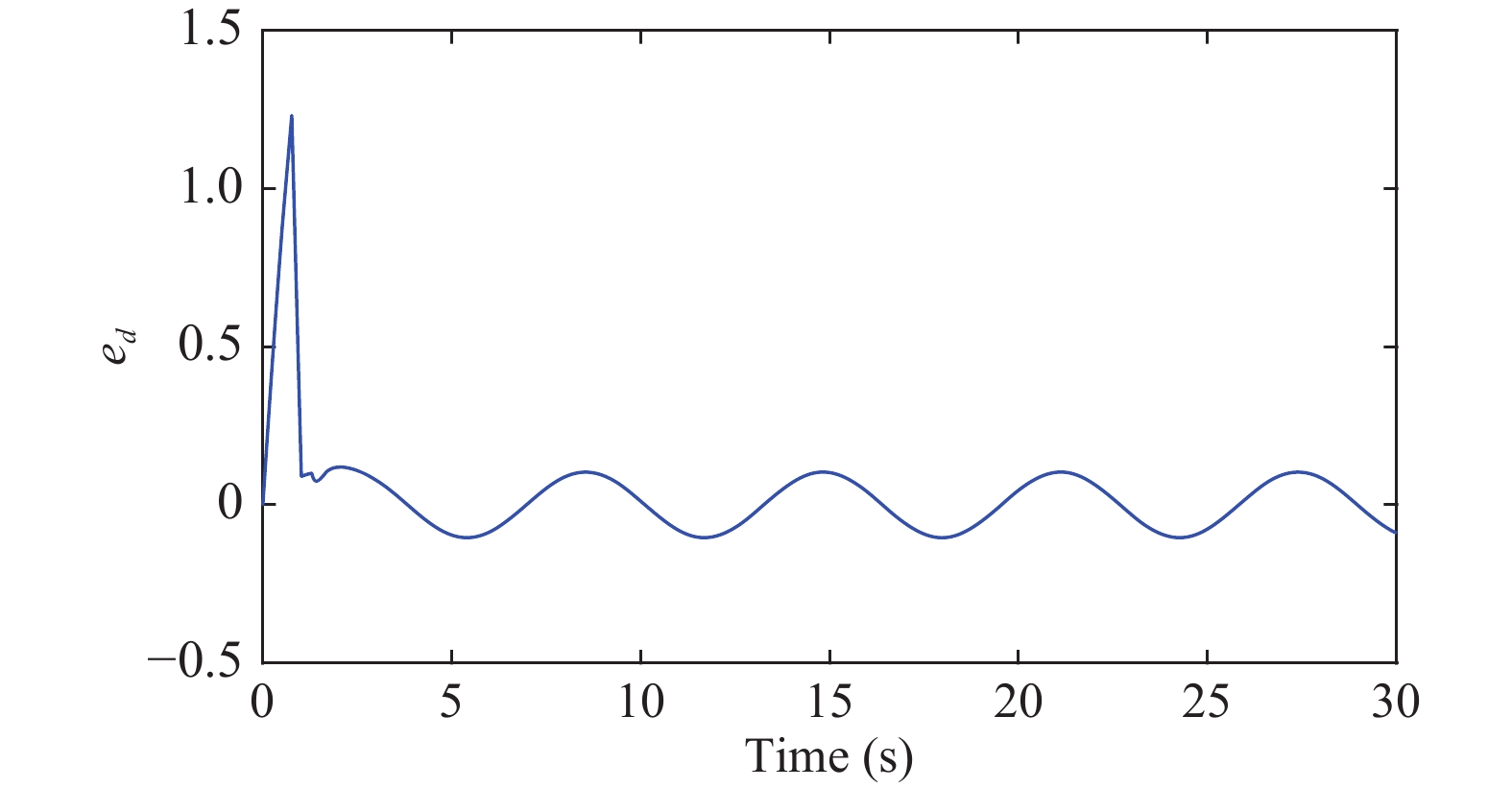
| Citation: | Dianwei Qian, Hui Ding, SukGyu Lee and Hyansu Bae, "Suppression of Chaotic Behaviors in a Complex Biological System by Disturbance Observer-based Derivative-Integral Terminal Sliding Mode," IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 126-135, Jan. 2020. doi: 10.1109/JAS.2019.1911834

|

| [1] |
G. K. Hansson, " Mechanisms of disease-Inflammation, atherosclerosis, and coronary artery disease,” N. Engl. J. Med., vol. 352, no. 16, pp. 1685–1695, 2005. doi: 10.1056/NEJMra043430
|
| [2] |
K. Ozaki and T. Tanaka, " Molecular genetics of coronary artery disease,” J. Hum. Genet., vol. 61, no. 1, pp. 71–77, 2016. doi: 10.1038/jhg.2015.70
|
| [3] |
G. W. He and D. P. Taggart, " Spasm in arterial grafts in coronary artery bypass grafting surgery,” Ann. Thorac. Surg., vol. 101, no. 3, pp. 1222–1229, 2016. doi: 10.1016/j.athoracsur.2015.09.071
|
| [4] |
X. L. Liu, F Hou, H Qin, and A. M. Hao, " Robust optimization-based coronary artery labeling from X-ray angiograms,” IEEE J. Biomed. Health Inform., vol. 20, no. 6, pp. 1608–1620, 2016. doi: 10.1109/JBHI.2015.2485227
|
| [5] |
A. Hernandez-Vela, C. Gatta, S. Escalera, L. Igual, V. Martin-Yuste, M. Sabate, and P. Radeva, " Accurate coronary centerline extraction, caliber estimation, and catheter detection in angiographies,” IEEE T. Inf. Technol. Biomed., vol. 16, no. 6, pp. 1332–1340, 2012. doi: 10.1109/TITB.2012.2220781
|
| [6] |
Z. Qian, I. Marvasty, S. Rinehart, and S. Voros, " A Lesion-specific coronary artery calcium quantification framework for the prediction of cardiac events,” IEEE T. Inf. Technol. Biomed., vol. 15, no. 5, pp. 673–680, 2011. doi: 10.1109/TITB.2011.2162074
|
| [7] |
C. C. Wang and H. T. Yauuu, " Chaos analysis and synchronization control of coronary artery systems,” Abstract Appl. Anal., pp. 209718, 2013. doi: 10.1155/2013/209718,2013
|
| [8] |
T. Schauer, N. O. Negard, F. Previdi, K. J. Hunt, and M. H. Fraser, " Ferchland E and Raisch J online identification and nonlinear control of the electrically stimulated quadriceps muscle,” Control Eng. Practice, vol. 13, no. 9, pp. 1207–1219, 2005. doi: 10.1016/j.conengprac.2004.10.006
|
| [9] |
W. L. Li, " Tracking control of chaotic coronary artery system,” Int. J. Syst. Sci., vol. 43, no. 1, pp. 21–30, 2012. doi: 10.1080/00207721003764125
|
| [10] |
L. M. Pecora and T. L. Carroll, " Synchronization in chaotic systems,” Phys. Rev. Lett., vol. 64, no. 8, pp. 821–824, 1990. doi: 10.1103/PhysRevLett.64.821
|
| [11] |
M. Rafikov and J. M. Balthazar, " On control and synchronization in chaotic and hyperchaotic systems via linear feedback control,” Commun. Nonlinear Sci. Numer. Simul., vol. 13, no. 7, pp. 1246–1255, 2008. doi: 10.1016/j.cnsns.2006.12.011
|
| [12] |
Y. G. Yu, H. X. Li, and J. Duan, " Chaos synchronization of a unified chaotic system via partial linearization,” Chaos Solitons Fractals, vol. 41, no. 1, pp. 457–463, 2009. doi: 10.1016/j.chaos.2008.02.010
|
| [13] |
D. Ghosh and A. R. Chowdhury, " Nonlinear observer-based impulsive synchronization in chaotic systems with multiple attractors,” Nonlinear Dyn., vol. 60, no. 4, pp. 607–613, 2010. doi: 10.1007/s11071-009-9618-5
|
| [14] |
A. Chithra and I. R. Mohamed, " Synchronization and chaotic communication in nonlinear circuits with nonlinear coupling,” J. Comput. Electron., vol. 16, no. 3, pp. 833–844, 2017. doi: 10.1007/s10825-017-1013-8
|
| [15] |
C. Gong, Y. Li, and X. Sun, " Backstepping control of synchronization for biomathematical model of muscular blood vessel,” J. Appl. Sci., vol. 24, no. 6, pp. 604–607, 2006.
|
| [16] |
W. S. Wu, Z. S. Zhao, J. Zhang, and L. K. Sun, " State feedback synchronization control of coronary artery chaos system with interval timevarying delay,” Nonlinear Dyn., vol. 87, no. 3, pp. 1773–1783, 2017. doi: 10.1007/s11071-016-3151-0
|
| [17] |
D. W. Qian, C. D. Li, S. G. Lee, and C. Ma, " Robust formation maneuvers through sliding mode for multi-agent systems with uncertainties,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 1, pp. 342–351, 2018.
|
| [18] |
C. J. Lin, S. K. Yang, and H.T. Yau, " Chaos suppression control of a coronary artery system with uncertainties by using variable structure control,” Comput. Math. Appl., vol. 64, no. 5, pp. 988–995, 2012. doi: 10.1016/j.camwa.2012.03.007
|
| [19] |
Z. S. Zhao, J. Zhang, G. Ding, and D. K. Zhang, " Chaos synchronization of coronary artery system based on higher order sliding mode adaptive control,” Acta Phys. Sin., vol. 64, no. 21, 2015. doi: 10.7498/aps.64.210508,2015
|
| [20] |
Z. S. Zhao, X. M. Li, J. Zhang, and Y. Z. Pei, " Terminal sliding mode control with self-tuning for coronary artery system synchronization,” Int. J. Biomath., vol. 10, no. 3, 2017. doi: 10.1142/S1793524517500413,2017
|
| [21] |
A. M. Zou, K. D. Kumar, Z. G. Hou, and X. Liu, " Finite-time attitude tracking control for spacecraft using terminal sliding mode and Chebyshev neural network,” IEEE Trans. Syst. Man Cybern,Part B-Cybern., vol. 41, no. 4, pp. 950–963, 2011. doi: 10.1109/TSMCB.2010.2101592
|
| [22] |
C. S. Chiu and C. T. Shen, " Finite-time control of DC-DC buck converters via integral terminal sliding modes,” Int. J. Electron., vol. 99, no. 5, pp. 643–655, 2012. doi: 10.1080/00207217.2011.643493
|
| [23] |
C. S. Chiu, " Derivative and integral terminal sliding mode control for a class of MIMO nonlinear systems,” Automatica, vol. 48, no. 2, pp. 316–326, 2012. doi: 10.1016/j.automatica.2011.08.055
|
| [24] |
M. Chen and S. Z. Ge, " Direct adaptive neural control for a class of uncertain nonaffine nonlinear systems based on disturbance observer,” IEEE T. Cybern., vol. 43, no. 4, pp. 1213–1225, 2013. doi: 10.1109/TSMCB.2012.2226577
|
| [25] |
T. Poloni, I. Kolmanovsky, and B. Rohal’-Ilkiv, " Simple input disturbance observer-based control: case atudies,” J. Dyn. Syst. Meas. Control Trans. ASME, vol. 140, no. 1, 2018. doi: 10.1115/1.4037298,2018
|
Figures(12)







 DownLoad:
DownLoad: