A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 7
Issue 1
Volume 7
Issue 1
IEEE/CAA Journal of Automatica Sinica
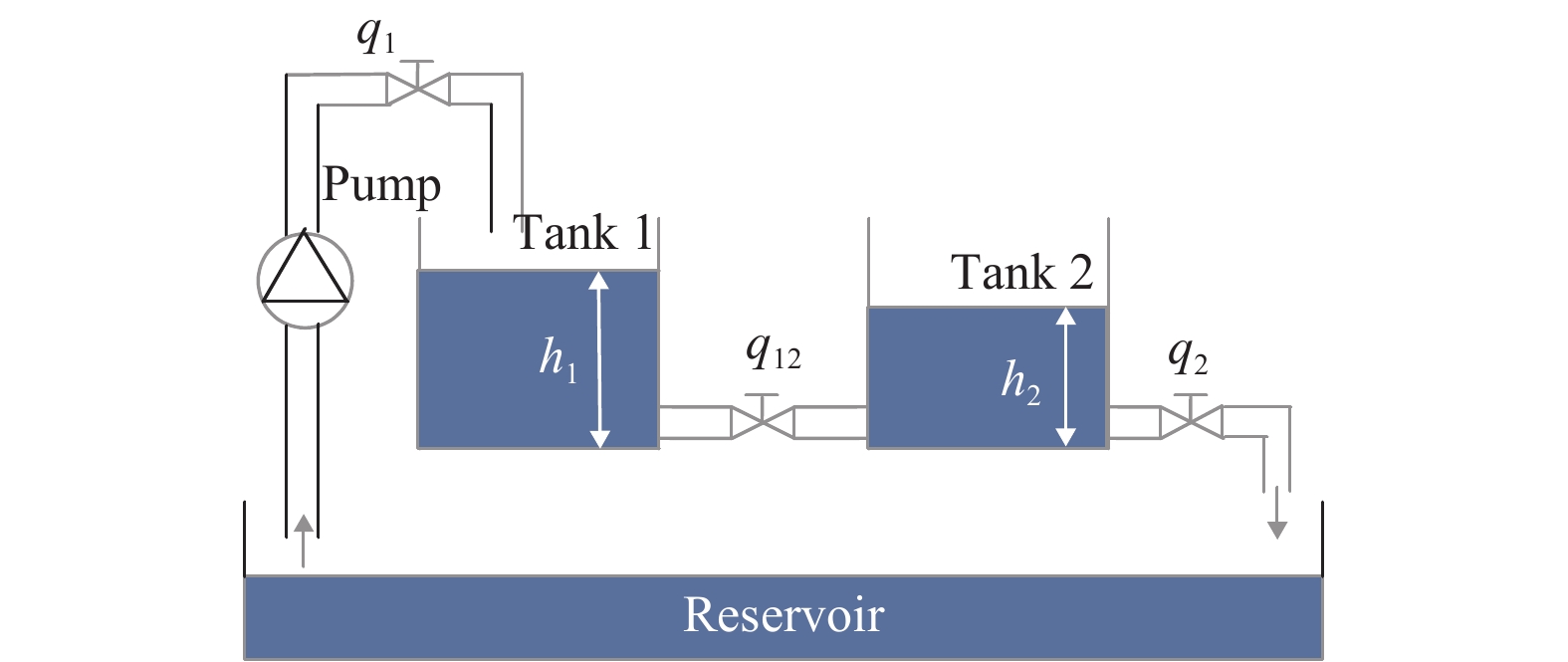
| Citation: | Sankata Bhanjan Prusty, Sridhar Seshagiri, Umesh Chandra Pati and Kamala Kanta Mahapatra, "Sliding Mode Control of Coupled Tank Systems Using Conditional Integrators," IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 118-125, Jan. 2020. doi: 10.1109/JAS.2019.1911831

|

| [1] |
B. W. Bequette, Process Control: Modelling, Design and Simulation. Prentice Hall, 2003.
|
| [2] |
C. A. Smith and A. B. Corripio, Principles and Practice of Automatic Process Control. John Wiley and Sons, Inc., 1998.
|
| [3] |
H. Pan, H. Wong, V. Kapila, and M. S. de Queiroz, " Experimental validation of a nonlinear backstepping liquid level controller for a state coupled two tank system,” Control Engineering Practice, vol. 13, pp. 27–40, December. 2005. doi: 10.1016/j.conengprac.2003.12.019
|
| [4] |
H. Gouta, S. H. Said, N. Barhoumi, and F. M’Sahli, " Observer-based backstepping controller for a state-coupled two-tank system,” IETE J. Research, vol. 61, no. 3, pp. 259–268, 2015. doi: 10.1080/03772063.2015.1018846
|
| [5] |
D. E. Miller and N. Mansouri, " Model reference adaptive control using simultaneous probing, estimation, and control,” IEEE Trans. Automatic Control, vol. 55, pp. 2014–2029, Sept. 2010. doi: 10.1109/TAC.2010.2042983
|
| [6] |
K. A. Mohideen, G. Saravanakumar, K. Valarmathi, D. Devaraj, and T. K. Radhakrishnan, " Real-coded genetic algorithm for system identification and tuning of a modified model reference adaptive controller for a hybrid tank system,” Applied Mathematical Modeling, vol. 37, pp. 3829–3847, Mar. 2013. doi: 10.1016/j.apm.2012.08.019
|
| [7] |
N. K. Poulsen, B. Kouvaritakis, and M. Cannon, " Constrained predictive control and its application to a coupled-tanks apparatus,” Int. J. Control, vol. 74, no. 6, pp. 552–564, 2001. doi: 10.1080/00207170010018788
|
| [8] |
W. Zhang, X. Xu, and Y. Xi, " A new two-degree-of-freedom level control scheme,” ISA Trans., vol. 41, pp. 333–342, Jul. 2002. doi: 10.1016/S0019-0578(07)60092-5
|
| [9] |
C. C. Ko, B. M. Chen, J. Chen, Y. Zhuang, and K. C. Tan, " Development of a web-based laboratory for control experiments on a coupled tank apparatus,” IEEE Trans. Education, vol. 44, pp. 76–86, Feb. 2001. doi: 10.1109/13.912713
|
| [10] |
C. Jauregui, M. D. Mermoud, G. Lefranc, R. Orostica, J. C. T. Torres, and O. Beytia, " Conical tank level control using fractional order PID controllers: a simulated and experimental study,” Control Theory and Technology, vol. 14, pp. 369–384, Nov. 2016.
|
| [11] |
S. R. Mahapatro and B. Subudhi, and S. Ghosh, " Design of a robust optimal decentralized PI controller based on nonlinear constraint optimization for level regulation: an experimental study,” IEEE/CAA J. Autom. Sinica, pp. 1–13, 2019.
|
| [12] |
Z. Aydogmus, " Implementation of a fuzzy-based level control using SCADA,” J. Expert Systems With Applications, vol. 36, pp. 6593–6597, Apr. 2009. doi: 10.1016/j.eswa.2008.07.055
|
| [13] |
T. Tani, S. Murakoshi, and M. Umano, " Neuro-fuzzy hybrid control system of tank level in petroleum plant,” IEEE Trans. Fuzzy Systems, vol. 4, pp. 360–368, Aug. 1996. doi: 10.1109/91.531776
|
| [14] |
S. C. Saxena, V. Kumar, and L. M. Waghmare, " Cascade control of interconnected system using neural network,” IETE J. Research, vol. 48, no. 6, pp. 461–469, 2002. doi: 10.1080/03772063.2002.11416311
|
| [15] |
S. Kamalasadan and A. A. Ghandakly, " A neural network parallel adaptive controller for dynamic system control,” IEEE Trans. Instrumentation and Measurement, vol. 56, no. 5, pp. 1786–1796, 2007. doi: 10.1109/TIM.2007.895674
|
| [16] |
N. Almutairi and M. Zribi, " Sliding mode control of coupled tanks,” Mechatronics, vol. 16, pp. 427–441, Sept. 2006. doi: 10.1016/j.mechatronics.2006.03.001
|
| [17] |
R. Benayache, S. M. Mahmoud, L. Chrifi-Alaoui, P. Bussy, and J.-M. Castelain, " Controller design using second order sliding mode algorithm with an application to a coupled-tank liquid-level system,” in Proc. Int. Conf. Control and Automation (ICCA), pp. 558–563, 2009.
|
| [18] |
K. H. Johansson, " The quadruple-tank process: a multivariable laboratory process with an adjustable zero,” IEEE Trans. Control Systems Technology, vol. 8, no. 3, pp. 456–465, 2000. doi: 10.1109/87.845876
|
| [19] |
P. P. Biswas, R. Srivastava, S. Ray, and A. N. Samanta, " Sliding mode control of quadruple tank process,” Mechatronics, vol. 19, pp. 548–561, Jun. 2009. doi: 10.1016/j.mechatronics.2009.01.001
|
| [20] |
A. Gaaloul and F. M’Sahli, " High gain output feedback control of a quadruple tank process,” in Proc. 14th IEEE Mediterranean Electrochemical Conf. (MELECON), pp. 23–28, May 2008.
|
| [21] |
S. Larguech, S. Aloui, A. Chaari, A. E. Hajjaji, and Y. Koubaa, " Improved sliding mode of a class of nonlinear systems: application to quadruple tank system,” in Proc. European Control Conf. (ECC), pp. 3203–3208, 2013.
|
| [22] |
S. Seshagiri and H. Khalil, " Robust output feedback regulation of minimum-phase nonlinear systems using conditional integrators,” Automatica, vol. 41, pp. 43–54, Jan. 2005.
|
| [23] |
E. Promtun and S. Seshagiri, " Sliding mode control of F-16 longitudinal dynamics,” in Proc. American Control Conf. (ACC), 2008.
|
| [24] |
S. Seshagiri, " Robust multivariable PI control: applications to process control,” in Proc. 17th World Congr. Int. Federation of Automatic Control, 2008.
|
| [25] |
H. Vo and S. Seshagiri, " Robust control of F-16 lateral dynamics,” in Proc. 34th IEEE Annual Conf. Industrial Electronics (IECON), pp. 343–348, 2008.
|
| [26] |
S. Seshagiri, " Position control of permanent magnet stepper motors using conditional servocompensators,” IET Control Theory &Applications, vol. 3, pp. 1196–1208, Sept. 2009.
|
| [27] |
S. B. Prusty, S. Seshagiri, U. Pati, and K. Mahapatra, " Sliding mode control of coupled tank systems using conditional integrators,” in Proc. Indian Control Conf. (ICC), pp. 146–151, 2016.
|
| [28] |
S. Nazrullah and H. Khalil, " Robust stabilization of non-minimum phase nonlinear systems using extended high-gain observers,” IEEE Trans. Automatic Control, vol. 56, no. 4, pp. 802–813, 2011. doi: 10.1109/TAC.2010.2069612
|
Figures(10) / Tables(2)







 DownLoad:
DownLoad: