A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 7
Issue 1
Volume 7
Issue 1
IEEE/CAA Journal of Automatica Sinica
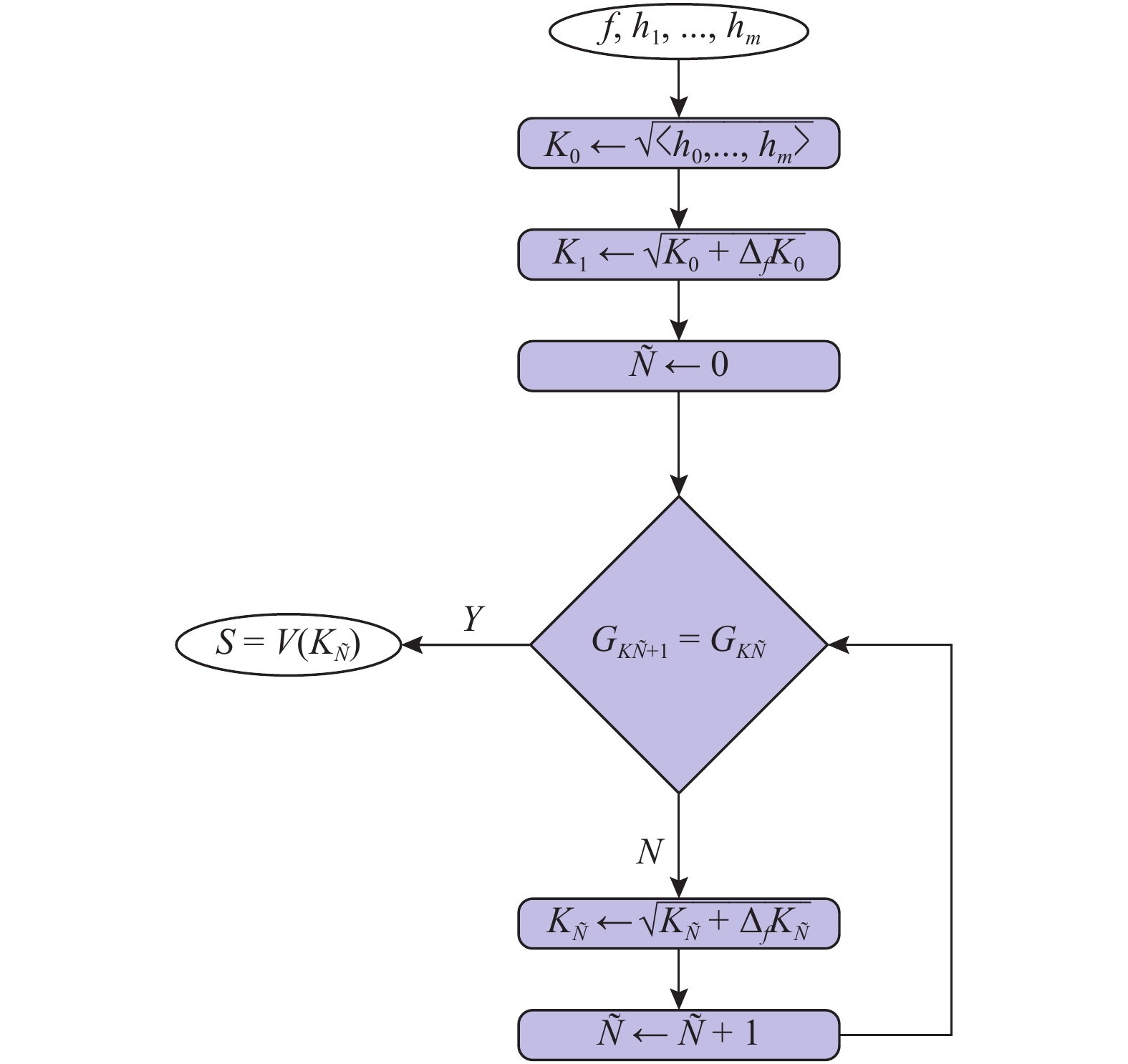
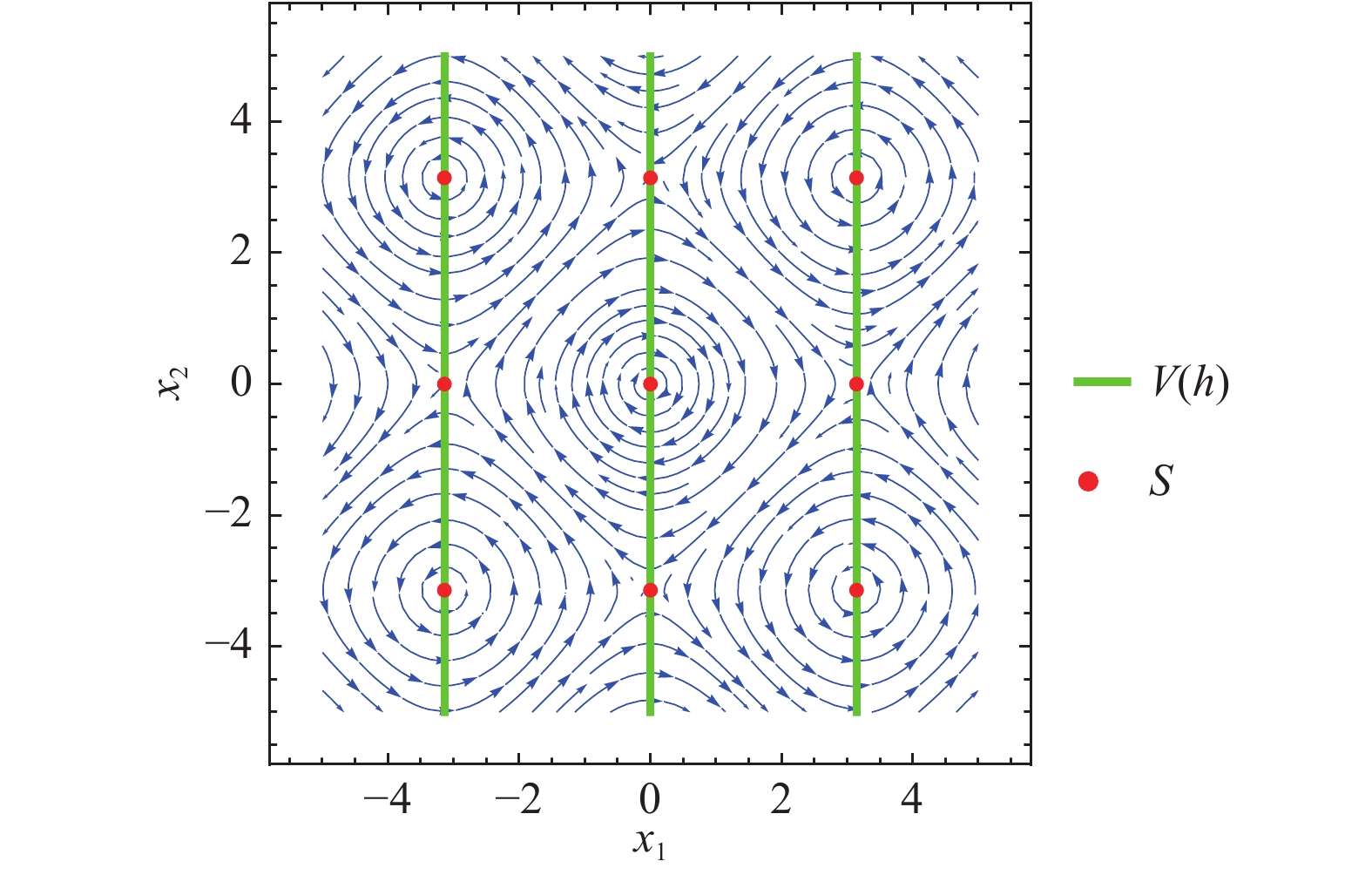
| Citation: | Laura Menini, Corrado Possieri and Antonio Tornambè, "Algorithms to Compute the Largest Invariant Set Contained in an Algebraic Set for Continuous-Time and Discrete-Time Nonlinear Systems," IEEE/CAA J. Autom. Sinica, vol. 7, no. 1, pp. 57-69, Jan. 2020. doi: 10.1109/JAS.2019.1911819

|

| [1] |
A. M. Lyapunov, " The general problem of the stability of motion,” Int. J. Control, vol. 55, no. 3, pp. 531–534, 1992. doi: 10.1080/00207179208934253
|
| [2] |
R. E. Kalman and J. E. Bertram, " Control system analysis and design via the " second method” of Lyapunov I: continuous-time systems,” J. Basic Eng., vol. 82, no. 2, pp. 371–393, 1960. doi: 10.1115/1.3662604
|
| [3] |
R. E. Kalman and J. E. Bertram, " Control system analysis and design via the " second method” of Lyapunov II: discrete-time systems,” J. Basic Eng., vol. 82, no. 2, pp. 394–400, 1960. doi: 10.1115/1.3662605
|
| [4] |
H. K. Khalil, Noninear Systems. Prentice-Hall, 1996.
|
| [5] |
S. Elaydi, An Introduction to Difference Equations. NY: Springer, 2005.
|
| [6] |
A. Bacciotti and A. Biglio, " Some remarks about stability of nonlinear discrete-time control systems,” Nonlinear Differ. Equ. Appl., vol. 8, no. 4, pp. 425–438, 2001. doi: 10.1007/PL00001456
|
| [7] |
A. R. Teel, " Lyapunov conditions certifying stability and recurrence for a class of stochastic hybrid systems,” Annu. Rev. Control, vol. 37, no. 1, pp. 1–24, 2013. doi: 10.1016/j.arcontrol.2013.02.001
|
| [8] |
J. P. LaSalle, " An invariance principle in the theory of stability,” Tech. Rep. 66-1, Center for Dynamical Systems, Brown University, Providence, 1966.
|
| [9] |
J. P. LaSalle, The Stability of Dynamical Systems. SIAM, 1976.
|
| [10] |
I. Kolmanovsky and E. G. Gilbert, " Theory and computation of disturbance invariant sets for discrete-time linear systems,” Math. Prob. Eng., vol. 4, no. 4, pp. 317–367, 1998. doi: 10.1155/S1024123X98000866
|
| [11] |
W. M. Wonham and A. S. Morse, " Decoupling and pole assignment in linear multivariable systems: a geometric approach,” SIAM J. Control, vol. 8, no. 1, pp. 1–18, 1970. doi: 10.1137/0308001
|
| [12] |
W. Lin and C. I. Byrnes, " Zero-state observability and stability of discrete-time nonlinear systems,” Automatica, vol. 31, no. 2, pp. 269–274, 1995. doi: 10.1016/0005-1098(94)00088-Z
|
| [13] |
A. Krener and A. Isidori, " Nonlinear zero distributions,” in Proc. IEEE Conf. Decis. Control, pp. 665–668, 1984.
|
| [14] |
A. Isidori, " The zero dynamics of a nonlinear system: from the origin to the latest progresses of a long successful story,” Eur. J. Control, vol. 19, no. 5, pp. 369–378, 2013. doi: 10.1016/j.ejcon.2013.05.014
|
| [15] |
W. Mei and F. Bullo, " Lasalle invariance principle for discrete-time dynamical systems: a concise and self-contained tutorial,” 2017.
|
| [16] |
M. Vidyasagar, Nonlinear Systems Analysis. SIAM, 2002.
|
| [17] |
L. F. Alberto, T. R. Calliero, and A. C. Martins, " An invariance principle for nonlinear discrete autonomous dynamical systems,” IEEE Trans. Autom. Control, vol. 52, no. 4, pp. 692–697, 2007. doi: 10.1109/TAC.2007.894532
|
| [18] |
J. K. Hale, " Dynamical systems and stability,” J. Math. Anal. Appl., vol. 26, no. 1, pp. 39–59, 1969. doi: 10.1016/0022-247X(69)90175-9
|
| [19] |
J. P. Hespanha, D. Liberzon, D. Angeli, and E. D. Sontag, " Nonlinear norm-observability notions and stability of switched systems,” IEEE Trans. Autom. Control, vol. 50, no. 2, pp. 154–168, 2005. doi: 10.1109/TAC.2004.841937
|
| [20] |
C. M. Kellett and A. R. Teel, " Smooth Lyapunov functions and robustness of stability for difference inclusions,” Syst. Control Lett., vol. 52, no. 5, pp. 395–405, 2004. doi: 10.1016/j.sysconle.2004.02.015
|
| [21] |
L. Menini, C. Possieri, and A. Tornambe, " Switching signal estimator design for a class of elementary systems,” IEEE Trans. Autom. Control, vol. 61, no. 5, pp. 1362–1367, 2016. doi: 10.1109/TAC.2015.2476135
|
| [22] |
K. Forsman, Some Generic Results on Algebraic Observability and Connections With Realization Theory. Linköping University, 1993.
|
| [23] |
L. Menini, C. Possieri, and A. Tornambe, " Algebraic certificates of (semi) definiteness for polynomials over fields containing the rationals,” IEEE Trans. Autom.Control, vol. 63, no. 1, pp. 158–173, 2018. doi: 10.1109/TAC.2017.2717941
|
| [24] |
K. Forsman and T. Glad, " Constructive algebraic geometry in nonlinear control,” in Proc. 29th IEEE Conf. Decis. Control, vol. 5, pp. 2825–2827, 1990.
|
| [25] |
L. Menini, C. Possieri, and A. Tornambe, " Algebraic methods for multiobjective optimal design of control feedbacks for linear systems,” IEEE Trans. Autom. Control, vol. 63, no. 12, pp. 4188–4203, 2018. doi: 10.1109/TAC.2018.2800784
|
| [26] |
D. Nesic and I. M. Y. Mareels, " Controllability of structured polynomial systems,” IEEE Trans. Autom. Control, vol. 44, no. 4, pp. 761–764, 1999. doi: 10.1109/9.754813
|
| [27] |
C. Possieri and A. Tornambe, " On polynomial vector fields having a given affine variety as attractive and invariant set: application to robotics,” Int. J. Control, vol. 88, no. 5, pp. 1001–1025, 2015.
|
| [28] |
C. Possieri and M. Sassano, " Motion planning, formation control and obstacle avoidance for multi-agent systems,” in Proc. IEEE Conf. Control Techn. Appl., pp. 879–884, 2018.
|
| [29] |
R. Hermann and A. Krener, " Nonlinear controllability and observability,” IEEE Tran. Autom. Control, vol. 22, no. 5, pp. 728–740, 1977. doi: 10.1109/TAC.1977.1101601
|
| [30] |
Z. Bartosiewicz, " Local observability of nonlinear systems,” Syst. Control Lett., vol. 25, no. 4, pp. 295–298, 1995. doi: 10.1016/0167-6911(94)00074-6
|
| [31] |
Z. Bartosiewicz, " Algebraic criteria of global observability of polynomial systems,” Automatica, vol. 69, pp. 210–213, 2016. doi: 10.1016/j.automatica.2016.02.033
|
| [32] |
D. R. Grayson and M. E. Stillman, " Macaulay2, a software system for research in algebraic geometry.” [Online] Available :http://www.math.uiuc.edu/Macaulay2/.
|
| [33] |
D. A. Cox, J. Little, and D. O’Shea, Ideals, Varieties, and Algorithms. New York: Springer, 2015.
|
| [34] |
L. Menini and A. Tornambe, Symmetries and Semi-invariants in the Analysis of Nonlinear Systems. New York: Springer, 2011.
|
| [35] |
J. P. LaSalle, " Stability theory for ordinary differential equations,” J. Diff. Equat., vol. 4, no. 1, pp. 57–65, 1968. doi: 10.1016/0022-0396(68)90048-X
|
| [36] |
G. Valmorbida and J. Anderson, " Region of attraction estimation using invariant sets and rational lyapunov functions,” Automatica, vol. 75, pp. 37–45, 2017. doi: 10.1016/j.automatica.2016.09.003
|
| [37] |
A. Iannelli, A. Marcos, and M. Lowenberg, " Robust estimations of the region of attraction using invariant sets,” J. Franklin Inst., vol. 356, no. 8, pp. 4622–4647, 2019. doi: 10.1016/j.jfranklin.2019.02.013
|
| [38] |
M. W. Hirsch, S. Smale, and R. L. Devaney, Differential Equations, Dynamical Systems, and An Introduction to Chaos. Academic press, 2012.
|
| [39] |
M. A. Savageau and E. O. Voit, " Recasting nonlinear differential equations as s-systems: a canonical nonlinear form,” Math. Biosci., vol. 87, no. 1, pp. 83–115, 1987. doi: 10.1016/0025-5564(87)90035-6
|
| [40] |
D. A. Cox, J. Little, and D. O’Shea, Using Algebraic Geometry. New York: Springer, 2006.
|
| [41] |
Y. Inouye, " On the observability of autonomous nonlinear systems,” J. Math. Anal. Appli., vol. 60, no. 1, pp. 236–247, 1977. doi: 10.1016/0022-247X(77)90062-2
|
| [42] |
A. Isidori, Nonlinear Control Systems. New York: Springer, 2013.
|
| [43] |
J. P. LaSalle, The Stability and Control of Discrete Processes. New York: Springer, 2012.
|
| [44] |
V. Sundarapandian, " An invariance principle for discrete-time nonlinear systems,” Appl. Math. Lett., vol. 16, no. 1, pp. 85–91, 2003. doi: 10.1016/S0893-9659(02)00148-9
|
| [45] |
W. M. Haddad and V. Chellaboina, Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach. Princeton Univ. Press, 2008.
|
| [46] |
M. Cao, A. S. Morse, and B. D. O. Anderson, " Coordination of an asynchronous multi-agent system via averaging,” IFAC Proc. Vol., vol. 38, no. 1, pp. 17–22, 2005.
|
| [47] |
L. Menini, C. Possieri, and A. Tornambe, " A symbolic algorithm to compute immersions of polynomial systems into linear ones up to an output injection,” J. Symb. Comput., 2019.
|
| [48] |
M. Bardet, " On the complexity of a Gröbner basis algorithm,” in Algorithms Seminar (F. Chyzak, ed.), pp. 85–92, 2005.
|
| [49] |
M. Bardet, J.-C. Faugere, and B. Salvy, " On the complexity of Gröbner basis computation of semi-regular overdetermined algebraic equations,” in Proc. Int. Conf. Polynomial System Solving, pp. 71–74, 2004.
|
| [50] |
P. Bürgisser, M. Clausen, and A. Shokrollahi, Algebraic Complexity Theory, vol. 315. Springer, 2013.
|
Figures(7)






 DownLoad:
DownLoad: