A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 6
Issue 6
Volume 6
Issue 6
IEEE/CAA Journal of Automatica Sinica
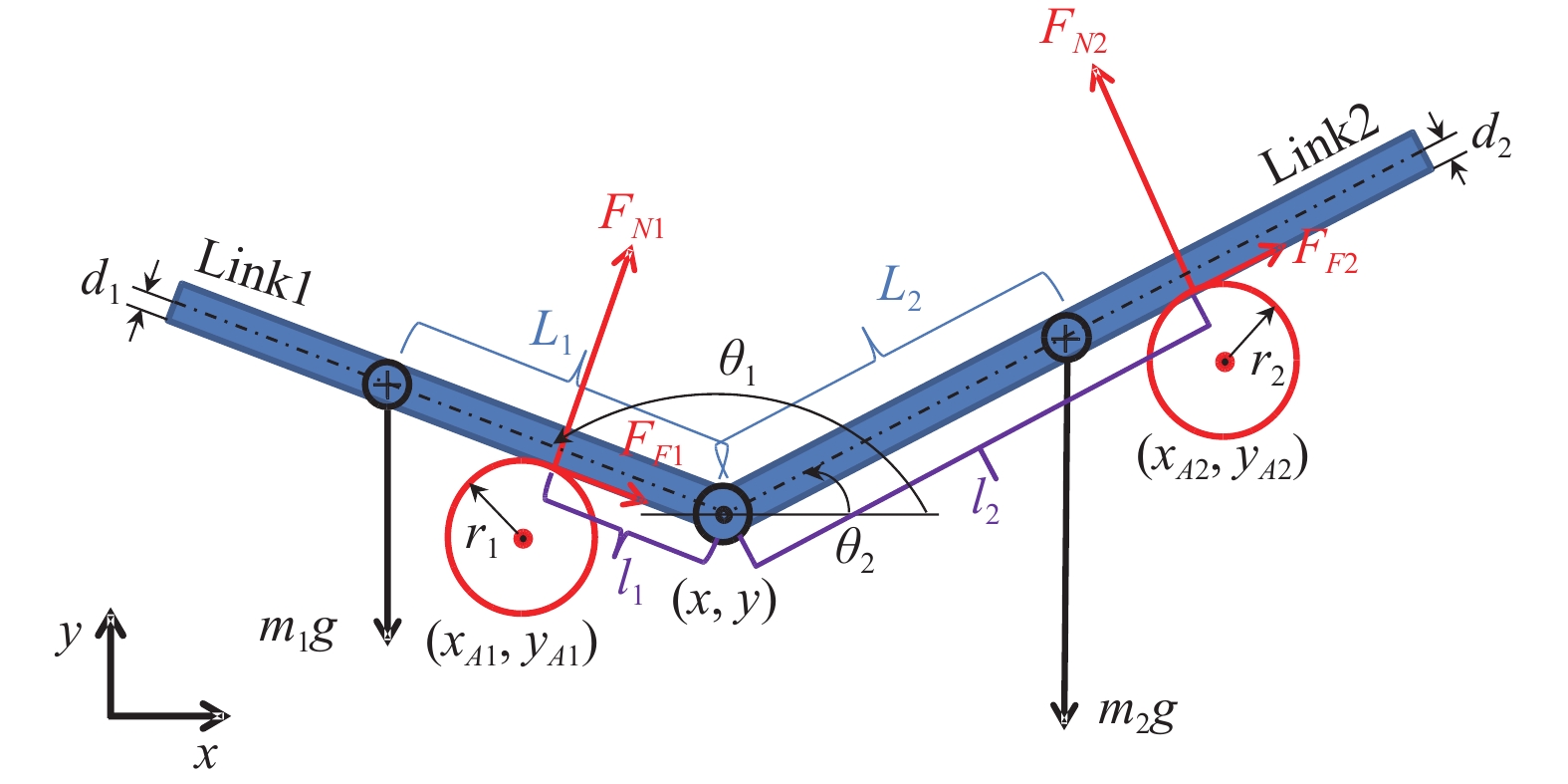
| Citation: | Changan Jiang and Satoshi Ueno, "Posture Maintenance Control of 2-Link Object By Nonprehensile Two-Cooperative-Arm Robot Without Compensating Friction," IEEE/CAA J. Autom. Sinica, vol. 6, no. 6, pp. 1397-1403, Nov. 2019. doi: 10.1109/JAS.2019.1911759

|

| [1] |
J. Jiang, Z. Huang, B. Huo, Y. Zhang, and S. Song, " Research progress and prospect of nursing robot,” Recent Patents on Mechanical Engineering, vol. 11, no. 1, pp. 41–57, 2018. doi: 10.2174/2212797611666180306124236
|
| [2] |
T. Tanioka, Y. Yasuhara, K. Osaka, H. Ito, and R. C. Locsin, Nursing Robots-Robotic Technology and Human Caring for the Elderly, Fukuo Shuppan Publishing, 2017.
|
| [3] |
R. C. Locsin and H. Ito, " Can humanoid nurse robots replace human nurses?” J. Nursing, vol. 5, pp. Article 1, 2018. doi: 10.7243/2056-9157-5-1
|
| [4] |
AMED, Robotic care devices portal, http://robotcare.jp/?lang=en.
|
| [5] |
RIKEN, Introduction of ROBEAR, http://rtc.nagoya.riken.jp/ROBEAR/.
|
| [6] |
F. Ruggiero, V. Lippiello, and B. Siciliano, " Nonprehensile dynamic manipulation: a survey,” IEEE Robotics and Automation Letters, vol. 3, no. 3, pp. 1711–1718, 2018. doi: 10.1109/LRA.2018.2801939
|
| [7] |
K. M. Lynch and C. K. Black, " Recurrence, controllability and stabilization of juggling,” IEEE Trans. Robotics and Automation, vol. 17, no. 2, pp. 113–124, 2001. doi: 10.1109/70.928557
|
| [8] |
R. Ronsse, P. Lefevre, and R. Sepulchre, " Rhythmic feedback control of a blind planar juggler,” IEEE Trans. Robotics, vol. 23, no. 4, pp. 790–802, 2007. doi: 10.1109/TRO.2007.900602
|
| [9] |
P. Cigliano, V. Lippiello, F. Ruggiero and B. Siciliano, " Robotic ball catching with an eye-in-hand single-camera system,” IEEE Trans. Control Systems Technology, vol. 23, no. 5, pp. 1657–1671, 2015. doi: 10.1109/TCST.2014.2380175
|
| [10] |
L. Acosta, J. Rodrigo, J. Mendez, G. Marichal, and M. Sigut, " Pingpong player prototype,” IEEE Robotics &Automation Magazine, vol. 10, no. 4, pp. 44–52, 2003.
|
| [11] |
M. Higashimori, K. Utsumi, Y. Omoto, and M. Kaneko, " Dynamic manipulation inspiered by the handling of a pizza peel,” IEEE Trans. Robotics, vol. 25, no. 4, pp. 829–838, 2009. doi: 10.1109/TRO.2009.2017085
|
| [12] |
T. Vose, P. Umbanhowar, and K. Lynch, " Friction-induced velocity for point parts on a rigid oscillated plate,” Int. J. Robotics Research, vol. 28, no. 8, pp. 1020–1039, 2009. doi: 10.1177/0278364909340279
|
| [13] |
Z. Zyada, Y. Hayakawa, and S. Hosoe, " Model-based control for nonprehensile manipulation of a two-rigid-link object by two cooperative arms,” in Proc. IEEE Int. Conf. Robotics and Biomimetics, pp. 472–477, 2010.
|
| [14] |
O. Mehrez, Z. Zyada, H. S. Abbas, and A. A. Abo-Ismail, " Nonprehensile manipulation planning of a three-rigid-link object using two cooperative robot arms,” Int. J. Modelling,Identification and Control, vol. 26, no. 1, pp. 19–31, 2006.
|
| [15] |
Z. Zyada, Y. Hayakawa, and S. Hosoe, " Fuzzy nonprehensile manipulation control of a two-rigid-link object by two cooperative arms,” in Proc. 18th IFAC World Cong., pp. 14614–14621, 2011.
|
| [16] |
C. Canudas de Wit, H. Olsson, K. J. Astrom, and P. Lischinsky, " A new model for control of systems with friction,” IEEE Trans. Automatic Control, vol. 40, no. 3, pp. 429–425, 1995.
|
| [17] |
C. Jiang, Y. Nakatomi, and S. Ueno, " Optimal control of holding motion by non prehensile two-cooperative-arm robot,” Mathematical Problems in Engineering, vol. 2016, pp. Article ID: 5921871, 2016.
|

Figures(15) / Tables(1)






 DownLoad:
DownLoad: