A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 7
Issue 2
Volume 7
Issue 2
IEEE/CAA Journal of Automatica Sinica
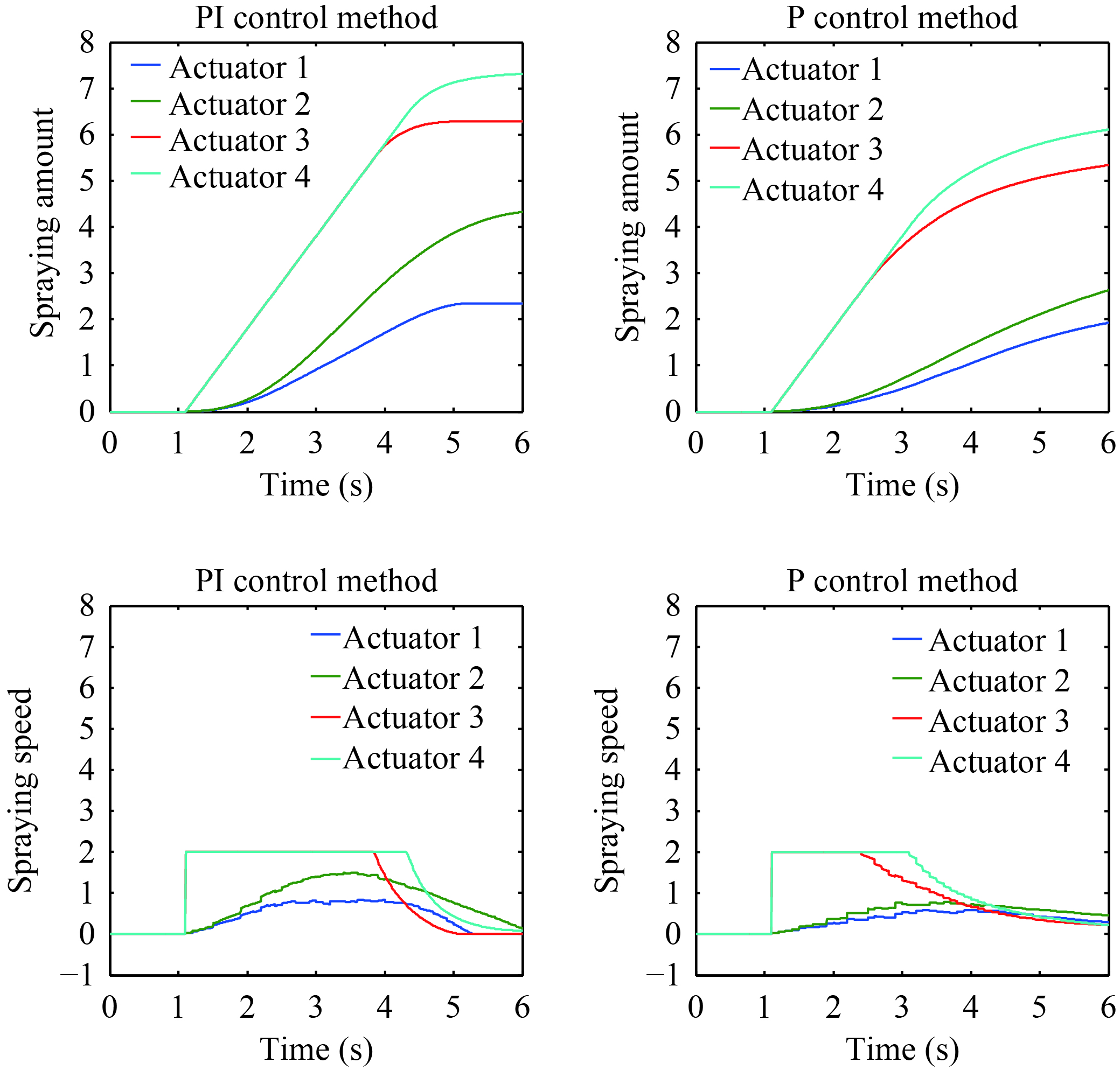
| Citation: | Juan Chen, Baotong Cui, YangQuan Chen and Bo Zhuang, "An Improved Cooperative Team Spraying Control of a Diffusion Process With a Moving or Static Pollution Source," IEEE/CAA J. Autom. Sinica, vol. 7, no. 2, pp. 494-504, Mar. 2020. doi: 10.1109/JAS.2019.1911519

|

| [1] |
E. V. Dogadkina, M. G. Dontsov, and V. I. Parfenyuk, “The effect of diffusion processes on surface smoothing upon chemical polishing of titanium,” Protection of Metals and Physical Chemistry of Surfaces, vol. 52, no. 5, pp. 947–953, Sep. 2016.
|
| [2] |
S. O. Akintunde and P. A. Selyshchev, “The influence of radiationinduced vacancy on the formation of thin-film of compound layer during a reactive diffusion process,” J. Physics and Chemistry of Solids, vol. 92, pp. 64–69, May 2016.
|
| [3] |
M. Caputo and C. Cametti, “Fractional derivatives in the diffusion process in heterogeneous systems: the case of transdermal patches,” Mathematical Biosciences, vol. 291, pp. 38–45, Sep. 2017. doi: 10.1016/j.mbs.2017.07.004
|
| [4] |
P. Stoneman, “The diffusion of innovations: some reflections,” Int. J. Economics of Business, vol. 25, no. 1, pp. 85–95, Feb. 2018. doi: 10.1080/13571516.2017.1390834
|
| [5] |
D. Vališ, O. Nováček, K. Hasilováa, and J. Leuchter, “Modelling of degradation and a soft failure moment during the operation of a supercapacitor applying selected diffusion processes,” Engineering Failure Analysis, vol. 82, pp. 566–582, Dec. 2017. doi: 10.1016/j.engfailanal.2017.04.019
|
| [6] |
Y. Q. Chen, Z. M. Wang, and J. S. Liang, “Actuation scheduling in mobile actuator networks for spatial-temporal feedback control of a diffusion process with dynamic obstacle avoidance,” in Proc. IEEE Int. Conf. Mechatronics and Autom., vol. 2, pp. 752–757, Jul. 2005.
|
| [7] |
F. D. Ge, Y. Q. Chen, and C. H. Kou, “Cyber-physical systems as general distributed parameter systems: three types of fractional order models and emerging research opportunities,” IEEE/CAA J. Autom. Sinica, vol. 2, no. 4, pp. 353–357, Oct. 2015. doi: 10.1109/JAS.2015.7296529
|
| [8] |
M. J. Balas and S. A. Frost, “Robust adaptive model tracking for distributed parameter control of linear infinite-dimensional systems in Hilbert space,” IEEE/CAA J. Autom. Sinica, vol. 1, no. 3, pp. 294–301, Jul. 2014. doi: 10.1109/JAS.2014.7004687
|
| [9] |
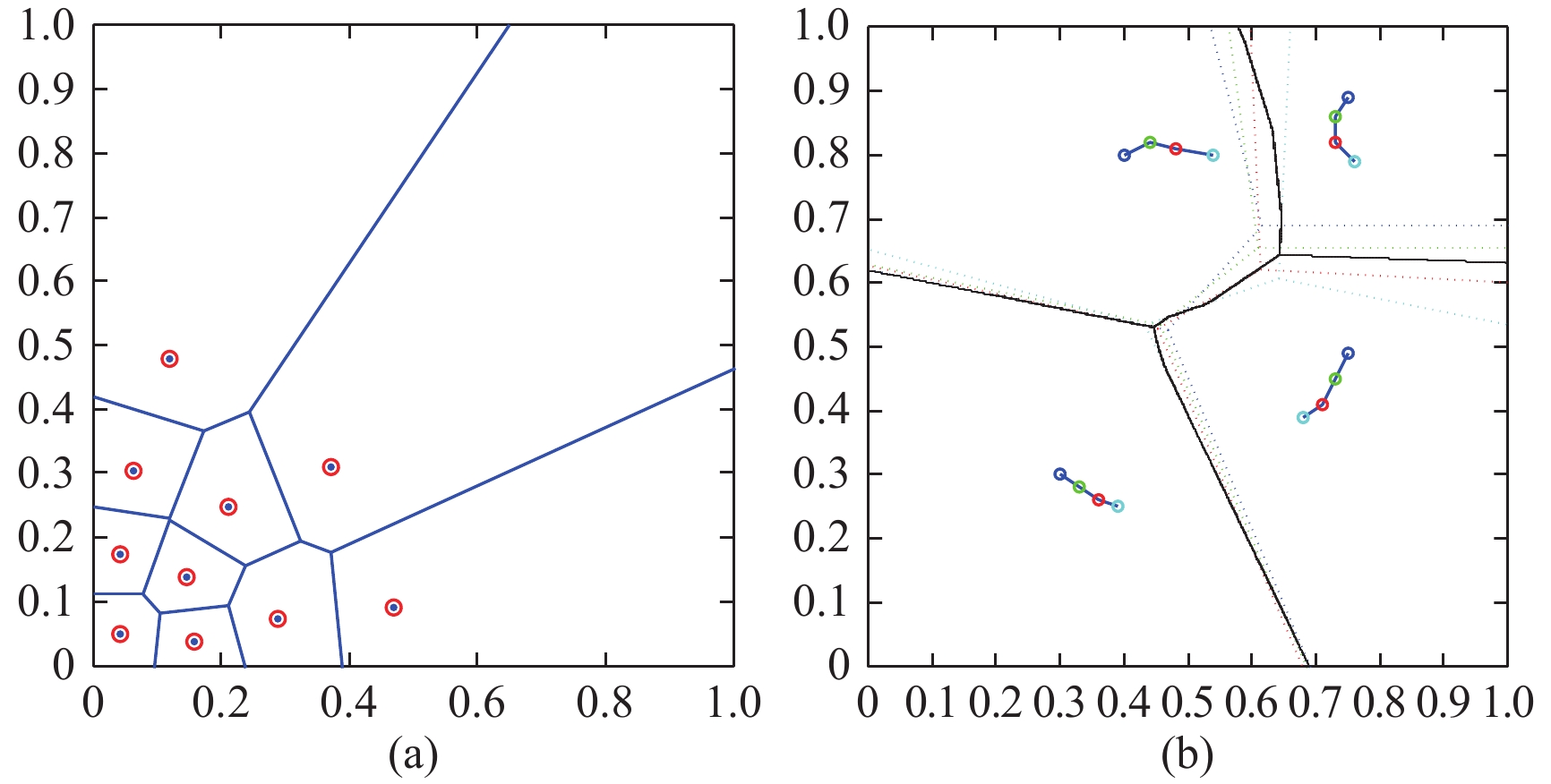
Q. Du, V. Faber, and M. Gunzburger, “Centroidal voronoi tessellations: applications and algorithms,” SIAM Review, vol. 41, no. 4, pp. 637–676, Dec. 1999. doi: 10.1137/S0036144599352836
|
| [10] |
L. L. Ju, Q. Du, and M. Gunzburger, “Probabilistic methods for centroidal voronoi tessellations and their parallel implementations,” Parallel Computing, vol. 28, no. 10, pp. 1477–1500, Oct. 2002. doi: 10.1016/S0167-8191(02)00151-5
|
| [11] |
J. Cortés, S. Martínez, T. Karatas, and F. Bullo, “Coverage control for mobile sensing networks,” IEEE Trans. Robotics and Autom., vol. 20, no. 2, pp. 243–255, Apr. 2004. doi: 10.1109/TRA.2004.824698
|
| [12] |
Y. Q. Chen, K. L. Moore, and Z. Song, “Diffusion boundary determination and zone control via mobile actuator-sensor networks (MASnet): challenges and opportunities,” in Proc. SPIE Conf. Intelligent Computing: Theory and Applications II, vol. 5421, pp. 102–113, Apr. 2004.
|
| [13] |
Q. Du, M. Gunzburger, and L. L. Ju, “Advances in studies and applications of centroidal voronoi tessellations,” Numerical Mathematics:Theory,Methods and Applications, vol. 3, no. 2, pp. 119–142, May 2010. doi: 10.4208/nmtma
|
| [14] |
M. Santos, Y. Diaz-Mercado, and M. Egerstedt, “Coverage control for multirobot teams with heterogeneous sensing capabilities,” IEEE Robotics and Autom. Letters, vol. 3, no. 2, pp. 919–925, Apr. 2018.
|
| [15] |
S. Cheng and F. Yuan, “Coverage control for mobile sensor networks with limited communication ranges on a circle,” Automatica, vol. 92, pp. 155–161, Jun. 2018. doi: 10.1016/j.automatica.2018.03.014
|
| [16] |
M. Schwager, M. P. Vitus, S. Powers, D. Rus, and C. J. Tomlin, “Robust adaptive coverage control for robotic sensor networks,” IEEE Trans. Control Network Systems, vol. 4, no. 3, pp. 462–476, Sep. 2017. doi: 10.1109/TCNS.2015.2512326
|
| [17] |
J. Habibi, H. Mahboubi, and A. G. Aghdam, “Distributed coverage control of mobile sensor networks subject to measurement error,” IEEE Trans. Autom. Control, vol. 61, no. 11, pp. 3330–3343, Nov. 2016. doi: 10.1109/TAC.2016.2521370
|
| [18] |
A. L. Faulds and B. B. King, “Sensor location in feedback control of partial differential equation systems,” in Proc. IEEE Int. Conf. on Control Applications, pp. 536–541, Sep. 2000.
|
| [19] |
Y. Q. Chen, Z. M. Wang, and J. S. Liang, “Optimal dynamic actuator location in distributed feedback control of a diffusion process,” in Proc. 44th IEEE Conf. Decision and Control, and the European Control Conf., pp. 5562–5567, Dec. 2005.
|
| [20] |
D. Uciński, Optimal Measurement Methods for Distributed Parameter System Identification. Boca Raton: CRC Press, 2004.
|
| [21] |
H. Y. Chao and Y. Q. Chen, Remote Sensing and Actuation Using Unmanned Vehicles. Hoboken, NJ, USA: John Wiley & Sons, Inc., 2012.
|
| [22] |
Q. Y. Chen, Z. M. Wang, and K. L. Moore, “Optimal spraying control of a diffusion process using mobile actuator networks with fractional potential field based dynamic obstacle avoidance,” in Proc. IEEE Int. Conf. Networking, Sensing and Control (ICNSC), pp. 107–112, Apr. 2006.
|
| [23] |
H. Y. Chao, Y. Q. Chen, and W. Ren, “A study of grouping effect on mobile actuator sensor networks for distributed feedback control of diffusion process using central Voronoi tessellations,” in Proc. IEEE Int. Conf. Mechatronics and Automation, pp. 769–774, Jun. 2006.
|
| [24] |
H. Y. Chao, Y. Q. Chen, and W. Ren, “Consensus of information in distributed control of a diffusion process using centroidal voronoi tessellations,” in Proc. IEEE Conf. Decision and Control, pp. 1441–1446, Dec. 2007.
|
| [25] |
Y. Liu, F. Guo, X. Y. He, and Q. Hui, “Boundary control for an axially moving system with input restriction based on disturbance observers,” IEEE Trans. Systems,Man,and Cybernetics Systems, vol. 49, no. 11, pp. 2242–2253, Nov. 2019.
|
| [26] |
Y. Liu, Z. J. Zhao, and W. He, “Boundary control of an axially moving accelerated/decelerated belt system,” Int. J. Robust and Nonlinear Control, vol. 26, pp. 3849–3866, Mar. 2016.
|
| [27] |
Y. Liu, Z. J. Zhao, and W. He, “Stabilization of an axially moving accelerated/decelerated system via an adaptive boundary control,” ISA Trans., vol. 64, pp. 394–404, Sep. 2016. doi: 10.1016/j.isatra.2016.04.006
|
| [28] |
F. D. Ge, J. Chen, Y. Q. Chen, and C. H. Kou, “Optimal spraying control of a tempered time fractional order anomalous diffusion system,” in Proc. Int. Symposium on Fractional Signals and Systems, pp. 43–48, Oct. 2015.
|
| [29] |
J. Chen, B. Zhuang, Y. Q. Chen, and B. T. Cui, “Diffusion control for a tempered anomalous diffusion system using fractional-order PI controllers,” ISA Trans., vol. 82, pp. 94–106, Nov. 2018.
|
| [30] |
D. G. Luenberger and Y. Y. Ye, Linear and Nonlinear Programming, 3rd ed. Boston: Springer, 2008.
|
| [31] |
D. P. Bertsekas, Constrained Optimization and Lagrange Multiplier Methods. New York: Academic Press, 1982.
|
| [32] |
A. Howard, M. J. Matarić, and G. S. Sukhatme, “Mobile sensor network deployment using potential fields: a distributed, scalable solution to the area coverage problem,” in Proc. 6th Int. Symposium on Distributed Autonomous Robotic Systems (DARS02), vol. 5, pp. 299–308, Jun. 2002.
|
| [33] |
N. Heo and P. K. Varshney, “Energy-efficient deployment of intelligent mobile sensor networks,” IEEE Trans. Systems,Man,and Cybernetics–Part A:Systems and Humans, vol. 35, no. 1, pp. 78–92, Jan. 2005. doi: 10.1109/TSMCA.2004.838486
|
| [34] |
A. van der Schaft. L2-gain and Passivity Techniques in Nonlinear Control, 2nd ed. New York: Springer-Verlag, 1999.
|
| [35] |
J. P. Lasalle, “Complete stability of a nonlinear control system,” in Proc. National Academy of Sciences of the United States of America, vol. 48, no. 4, pp. 600–603, Apr. 1962.
|
| [36] |
J. Cortés, S. Martínez, T. Karatas, and F. Bullo, “Coverage control for mobile sensing networks: variations on a theme,” in Proc. 10th Mediterranean Conf. Control and Automation-MED, Jul. 2002.
|
| [37] |
J. S. Liang and Y. Q. Chen, “Diff-MAS2D (version 0.9) user’s manual: a simulation platform for controlling distributed parameter systems (diffusion) with networked movable actuators and sensors (MAS) in 2D domain,” Techical Report, Center for Self-Organizing and Intelligent Systems (CSOIS), Department of Electrical and Computer Engineering, College of Engineering, Utah State University, USA, 2004.
|
| [38] |
J. S. Liang and Y. Q. Chen, “Diff/Wave-MAS2D: a simulation platform for measurement and actuation scheduling in distributed parameter systems with mobile actuators and sensors,” in Proc. IEEE Int. Conf. Mechatronics and Autom., pp. 2228–2233, Jul. 2005.
|
| [39] |
J. X. Cao, Y. Q. Chen, and C. P. Li, “Multi-UAV-based optimal cropdusting of anomalously diffusing infestation of crops,” in Proc. American Control Conf., pp. 1278–1283, Jul. 2015.
|
| [40] |
D. Y. Xue and Y. Q. Chen, System Simulation Techniques with MATLAB and Simulink. New Jersey, USA: Wiley & Sons, 2013.
|
Figures(7)






 DownLoad:
DownLoad: