A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 12
Volume 11
Issue 12
IEEE/CAA Journal of Automatica Sinica
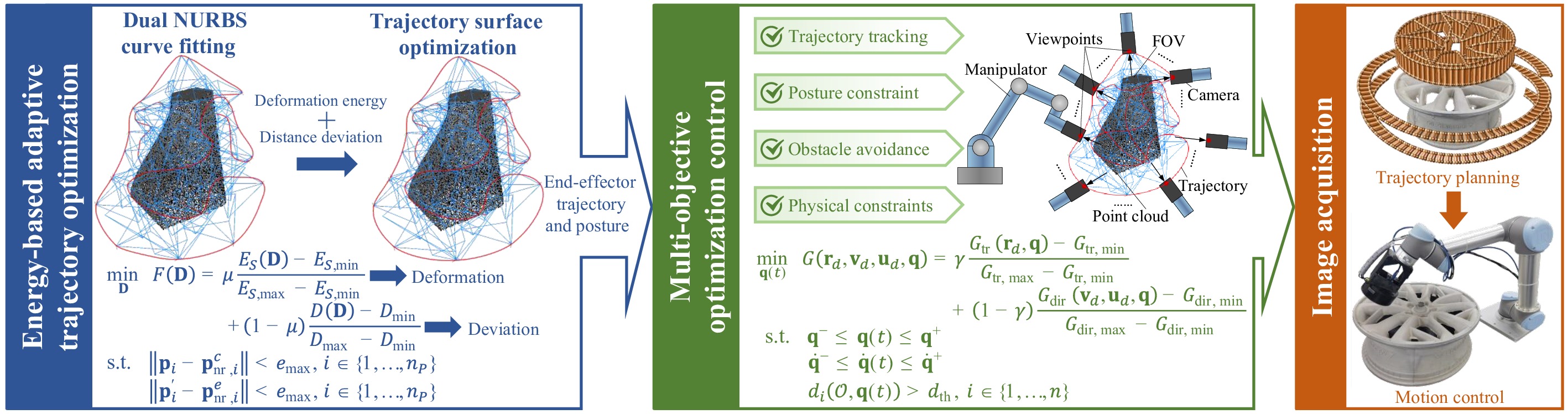
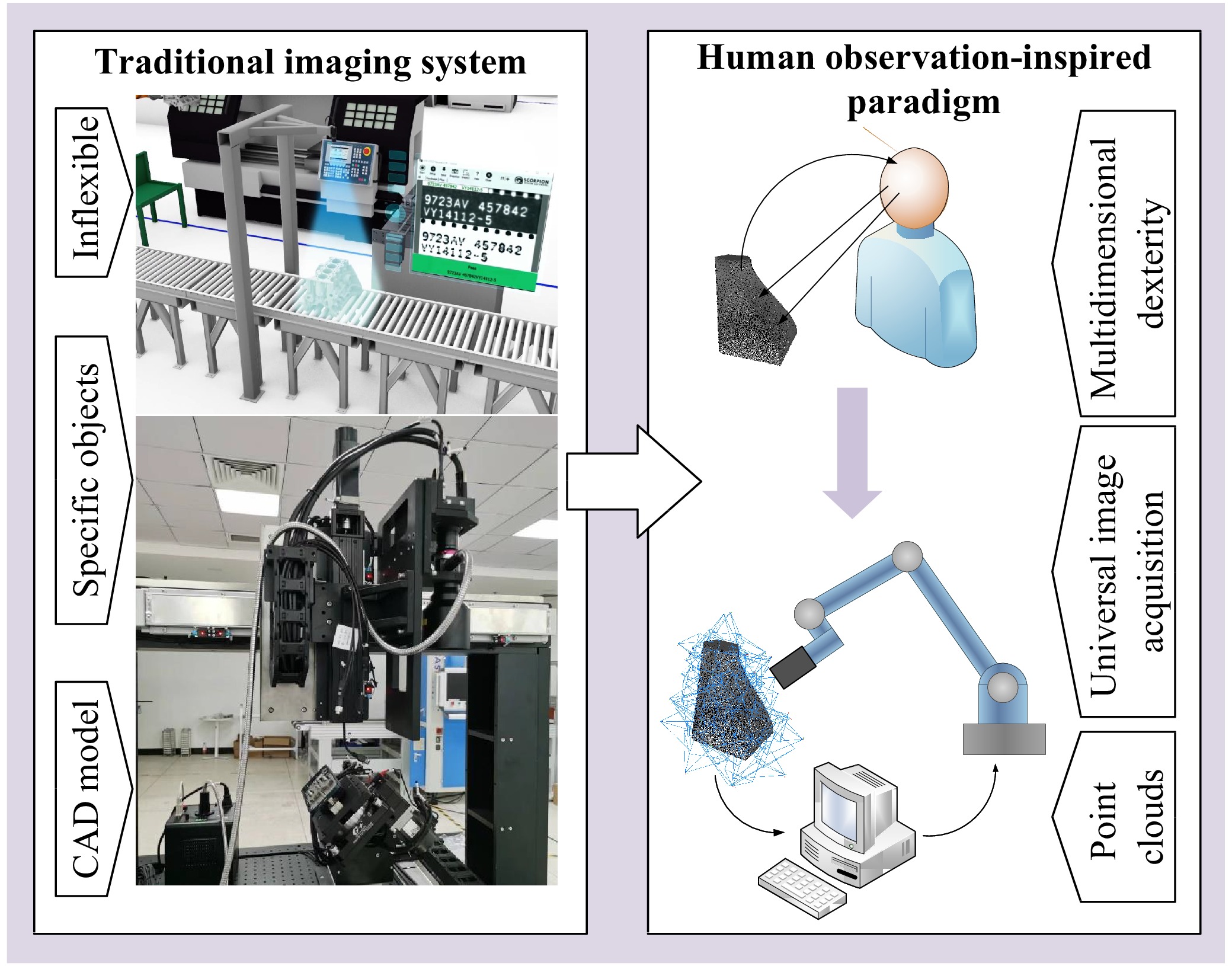
| Citation: | H. Liu, Y. Tong, and Z. Zhang, “Human observation-inspired universal image acquisition paradigm integrating multi-objective motion planning and control for robotics,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 12, pp. 2463–2475, Dec. 2024. doi: 10.1109/JAS.2024.124512

|

| [1] |
Y. Liu, J. Dong, Y. Li, X. Gong, and J. Wang, “A UAV-based aircraft surface defect inspection system via external constraints and deep learning,” IEEE Trans. Instrumentation and Measurement, vol. 71, pp. 1–15, 2022.
|
| [2] |
G. Dwivedi, L. Pensia, V. Lohchab, and R. Kumar, “Nondestructive inspection and quantification of soldering defects in PCB using an autofocusing digital holographic camera,” IEEE Trans. Instrumentation and Measurement, vol. 72, pp. 1–8, 2023. doi: 10.1109/TIM.2023.3298390
|
| [3] |
S. B. Block, R. D. da Silva, L. B. Dorini, and R. Minetto, “Inspection of imprint defects in stamped metal surfaces using deep learning and tracking,” IEEE Trans. Industrial Electronics, vol. 68, no. 5, pp. 4498–4507, 2021. doi: 10.1109/TIE.2020.2984453
|
| [4] |
J. Q. Yang, S. Zhou, D. van Le, D. Ho, and R. Tan, “Improving quality control with industrial aiot at HP factories: Experiences and learned lessons,” in Proc. 18th Annual IEEE Int. Conf. Sensing, Communication, and Networking, Rome, Italy, 2021, pp. 1–9.
|
| [5] |
P. Stavropoulos, K. Sabatakakis, A. Papacharalampopoulos, and D. Mourtzis, “Infrared (IR) quality assessment of robotized resistance spot welding based on machine learning,” The Int. J. Advanced Manufacturing Technology, vol. 119, no. 3–4, pp. 1785–1806, 1785.
|
| [6] |
D. Nakhaeinia, P. Payeur, and R. Laganiere, “A mode-switching motion control system for reactive interaction and surface following using industrial robots,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 3, pp. 670–682, 2018. doi: 10.1109/JAS.2018.7511069
|
| [7] |
Y. Tong, J. Liu, Y. Liu, and Y. Yuan, “Analytical inverse kinematic computation for 7-DOF redundant sliding manipulators,” Mechanism and Machine Theory, vol. 155, p. 104006, 2021. doi: 10.1016/j.mechmachtheory.2020.104006
|
| [8] |
Q. Wang, W. Jiao, P. Wang, and Y. Zhang, “Digital twin for human-robot interactive welding and welder behavior analysis,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 2, pp. 334–343, 2021. doi: 10.1109/JAS.2020.1003518
|
| [9] |
H. Chae, Y. Moon, K. Lee, S. Park, H. S. Kim, and T. Seo, “A tethered façade cleaning robot based on a dual rope windlass climbing mechanism: Design and experiments,” IEEE/ASME Trans. Mechatronics, vol. 27, no. 4, pp. 1982–1989, 2022. doi: 10.1109/TMECH.2022.3172689
|
| [10] |
J. Yang, X. Wang, and Y. Zhao, “Parallel manufacturing for industrial metaverses: A new paradigm in smart manufacturing,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 12, pp. 2063–2070, 2022. doi: 10.1109/JAS.2022.106097
|
| [11] |
R. Almadhoun, T. Taha, L. Seneviratne, J. Dias, and G. Cai, “A survey on inspecting structures using robotic systems,” Int. J. Advanced Robotic Systems, vol. 13, no. 6, p. 1729881416663664, 2016. doi: 10.1177/1729881416663664
|
| [12] |
I. D. Lee, J. H. Seo, Y. M. Kim, J. Choi, S. Han, and B. Yoo, “Automatic pose generation for robotic 3-D scanning of mechanical parts,” IEEE Trans. Robotics, vol. 36, no. 4, pp. 1219–1238, 2020. doi: 10.1109/TRO.2020.2980161
|
| [13] |
M. Xiao, Y. Ding, and G. Yang, “A model-based trajectory planning method for robotic polishing of complex surfaces,” IEEE Trans. Autom. Science and Engineering, vol. 19, no. 4, pp. 2890–2903, 2022. doi: 10.1109/TASE.2021.3095061
|
| [14] |
Y. Liu, W. Zhao, H. Liu, Y. Wang, and X. Yue, “Coverage path planning for robotic quality inspection with control on measurement uncertainty,” IEEE/ASME Trans. Mechatronics, vol. 27, no. 5, pp. 3482–3493, 2022. doi: 10.1109/TMECH.2022.3142756
|
| [15] |
N. Ratliff, M. Zucker, J. A. Bagnell, and S. Srinivasa, “CHOMP: Gradient optimization techniques for efficient motion planning,” in Proc. IEEE Int. Conf. Robotics and Automation, 2009, pp. 489–494.
|
| [16] |
M. Kalakrishnan, S. Chitta, E. Theodorou, P. Pastor, and S. Schaal, “STOMP: Stochastic trajectory optimization for motion planning,” in Proc. IEEE Int. Conf. Robotics and Automation, Shanghai, China, 2011, pp. 4569–4574.
|
| [17] |
A. H. Qureshi, A. Simeonov, M. J. Bency, and M. C. Yip, “Motion planning networks,” in Proc. Int. Conf. Robotics and Automation, 2019, pp. 2118–2124.
|
| [18] |
A. H. Qureshi, Y. Miao, A. Simeonov, and M. C. Yip, “Motion planning networks: Bridging the gap between learning-based and classical motion planners,” IEEE Trans. Robotics, vol. 37, no. 1, pp. 48–66, 2021. doi: 10.1109/TRO.2020.3006716
|
| [19] |
Z. Zhang, S. Chen, X. Deng, and J. Liang, “A circadian rhythms neural network for solving the redundant robot manipulators tracking problem perturbed by periodic noise,” IEEE/ASME Trans. Mechatronics, vol. 26, no. 6, pp. 3232–3242, 2021. doi: 10.1109/TMECH.2021.3056409
|
| [20] |
Y. Tong, J. Liu, X. Zhang, and Z. Ju, “Four-criterion-optimization-based coordination motion control of dual-arm robots,” IEEE Trans. Cognitive and Developmental Systems, vol. 15, no. 2, pp. 794–807, 2023. doi: 10.1109/TCDS.2022.3182534
|
| [21] |
Z. Xie, L. Jin, and X. Luo, “Kinematics-based motion-force control for redundant manipulators with quaternion control,” IEEE Trans. Autom. Science and Engineering, pp. 1–14, 2022.
|
| [22] |
Y. Tong, J. Liu, H. Zhou, Z. Ju, and X. Zhang, “Adaptive tracking control of robotic manipulators with unknown kinematics and uncertain dynamics,” IEEE Trans. Autom. Science and Engineering, 2023. DOI: 10.1109/TASE.2023.3309964.
|
| [23] |
A. H. Khan, S. Li, and X. Luo, “Obstacle avoidance and tracking control of redundant robotic manipulator: An RNN-based metaheuristic approach,” IEEE Trans. Industrial Informatics, vol. 16, no. 7, pp. 4670–4680, 2020. doi: 10.1109/TII.2019.2941916
|
| [24] |
M. Yang, Y. Zhang, N. Tan, and H. Hu, “Concise discrete ZNN controllers for end-effector tracking and obstacle avoidance of redundant manipulators,” IEEE Trans. Industrial Informatics, vol. 18, no. 5, pp. 3193–3202, 2022. doi: 10.1109/TII.2021.3109426
|
| [25] |
Z. Xu, X. Zhou, H. Wu, X. Li, and S. Li, “Motion planning of manipulators for simultaneous obstacle avoidance and target tracking: An RNN approach with guaranteed performance,” IEEE Trans. Industrial Electronics, vol. 69, no. 4, pp. 3887–3897, 2022. doi: 10.1109/TIE.2021.3073305
|
| [26] |
S. Wang, F. Qin, Y. Tong, X. Shang, and Z. Zhang, “Probabilistic boundary-guided point cloud primitive segmentation network,” IEEE Trans. Instrumentation and Measurement, vol. 72, p. 2529413, 2023. doi: 10.1109/TIM.2023.3322509
|
| [27] |
S. Wang, Y. Tong, X. Shang, and Z. Zhang, “Hierarchical viewpoint planning for complex surfaces in industrial product inspection,” IEEE/ASME Trans. Mechatronics, 2023. DOI: 10.1109/TMECH.2023.3340312.
|
| [28] |
C. Deng and H. Lin, “Progressive and iterative approximation for least squares b-spline curve and surface fitting,” Computer-Aided Design, vol. 47, pp. 32–44, 2014. doi: 10.1016/j.cad.2013.08.012
|
| [29] |
G. Wang, W. Li, C. Jiang, D. Zhu, Z. Li, W. Xu, H. Zhao, and H. Ding, “Trajectory planning and optimization for robotic machining based on measured point cloud,” IEEE Trans. Robotics, vol. 38, no. 3, pp. 1621–1637, 2022. doi: 10.1109/TRO.2021.3108506
|
| [30] |
M. Pourazady and X. Xu, “Direct manipulations of NURBS surfaces subjected to geometric constraints,” Computers & Graphics, vol. 30, no. 4, pp. 598–609, 2006.
|
| [31] |
X. Zhang, J. Liu, and Y. Li, “An obstacle avoidance algorithm for space hyper-redundant manipulators using combination of RRT and shape control method,” Robotica, vol. 40, no. 4, pp. 1036–1069, 2022. doi: 10.1017/S0263574721000928
|
| [32] |
J. Yan, L. Jin, Z. Yuan, and Z. Liu, “RNN for receding horizon control of redundant robot manipulators,” IEEE Trans. Industrial Electronics, vol. 69, no. 2, pp. 1608–1619, 2022. doi: 10.1109/TIE.2021.3062257
|
Figures(19) / Tables(4)






 DownLoad:
DownLoad: