A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 4
Volume 11
Issue 4
IEEE/CAA Journal of Automatica Sinica
| Citation: | E. Javanfar and M. Rahmani, “Data-based filters for non-Gaussian dynamic systems with unknown output noise covariance,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 4, pp. 866–877, Apr. 2024. doi: 10.1109/JAS.2023.124164

|
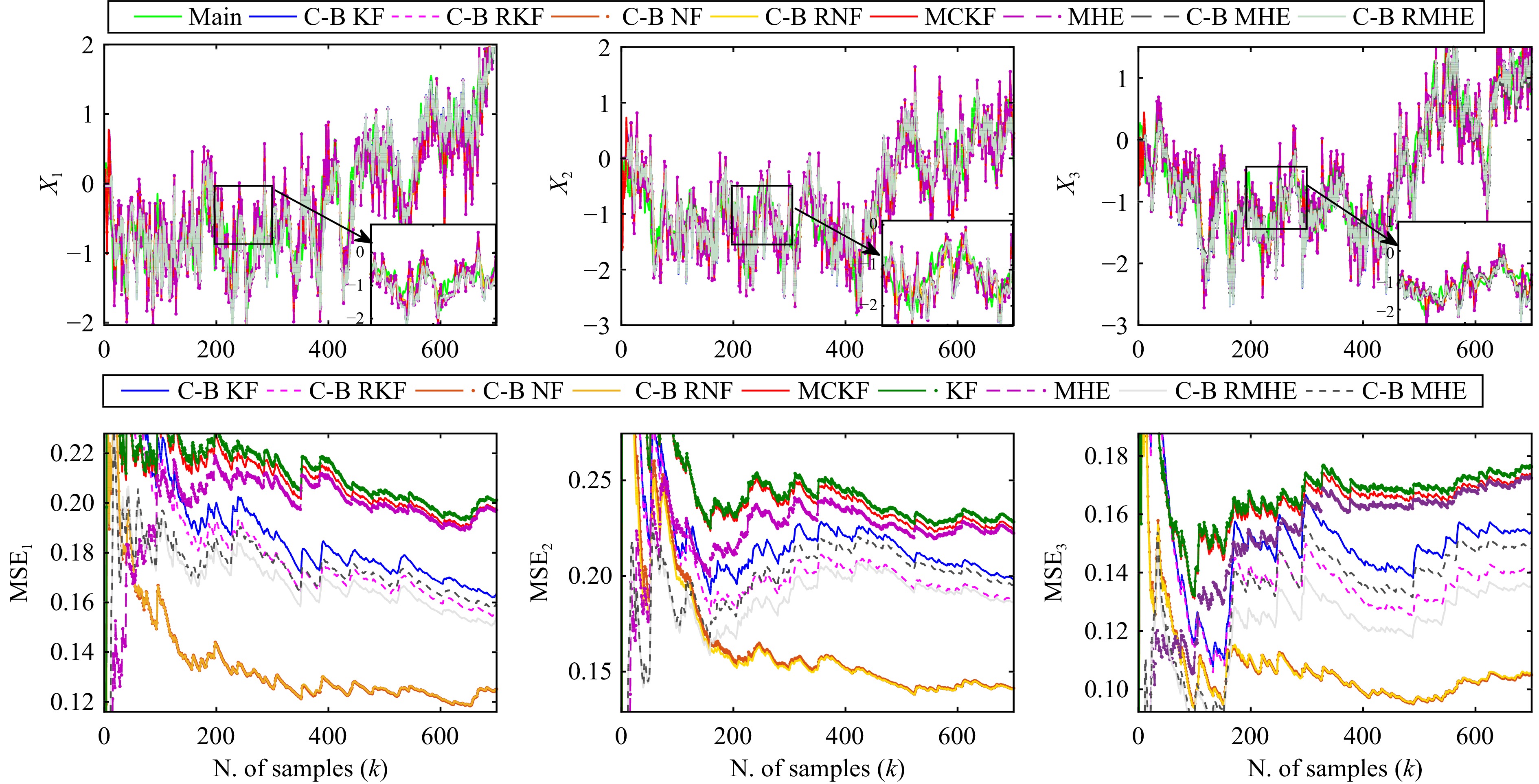
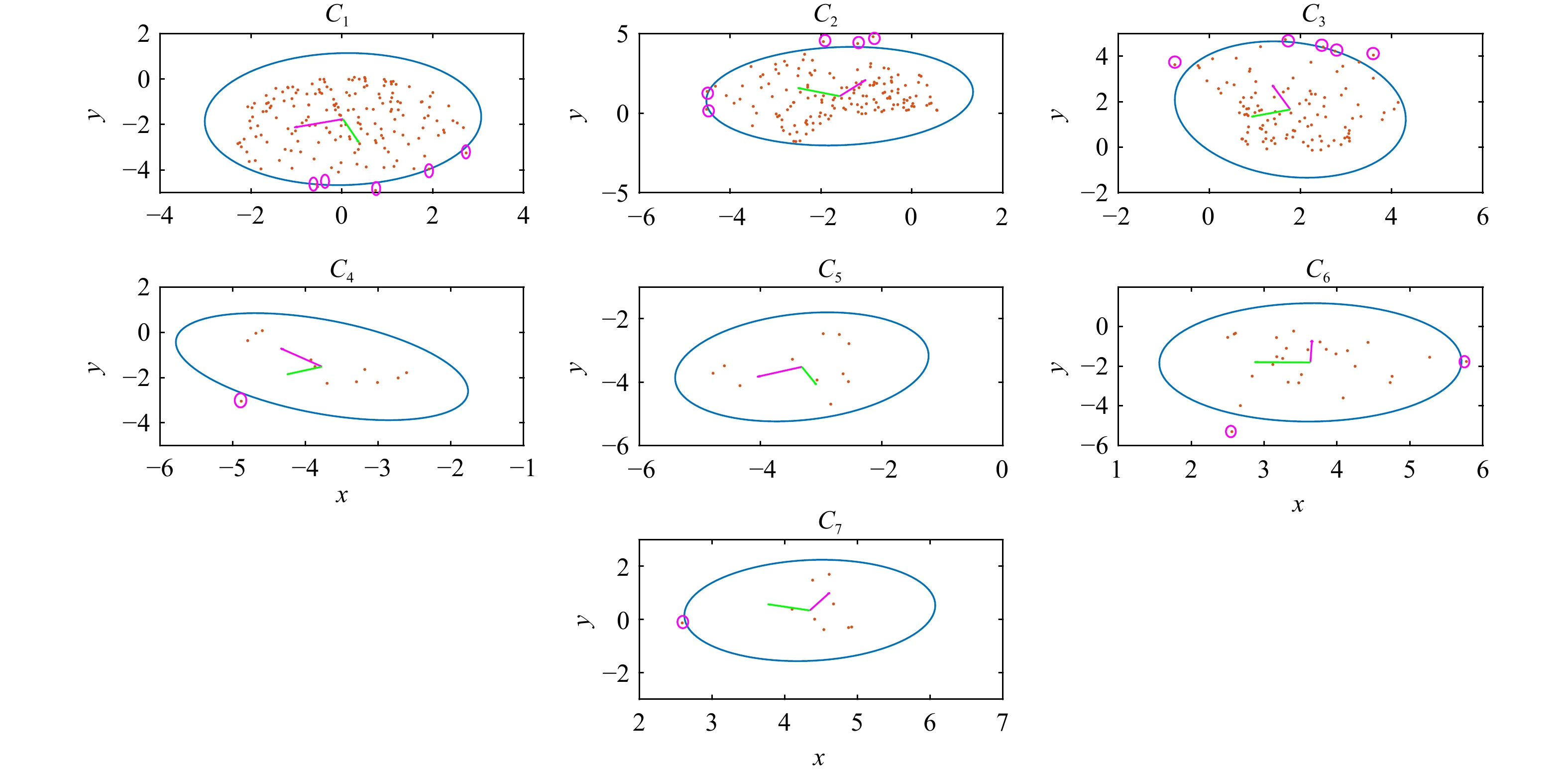
This paper proposes linear and nonlinear filters for a non-Gaussian dynamic system with an unknown nominal covariance of the output noise. The challenge of designing a suitable filter in the presence of an unknown covariance matrix is addressed by focusing on the output data set of the system. Considering that data generated from a Gaussian distribution exhibit ellipsoidal scattering, we first propose the weighted sum of norms (SON) clustering method that prioritizes nearby points, reduces distant point influence, and lowers computational cost. Then, by introducing the weighted maximum likelihood, we propose a semi-definite program (SDP) to detect outliers and reduce their impacts on each cluster. Detecting these weights paves the way to obtain an appropriate covariance of the output noise. Next, two filtering approaches are presented: a cluster-based robust linear filter using the maximum a posterior (MAP) estimation and a cluster-based robust nonlinear filter assuming that output noise distribution stems from some Gaussian noise resources according to the ellipsoidal clusters. At last, simulation results demonstrate the effectiveness of our proposed filtering approaches.

| [1] |
J. Han and M. Kamber, Data Mining: Concepts and Techniques. Morgan Kaufmann, 2000.
|
| [2] |
R. M. Murray, K. J. Astrom, S. P. Boyd, R. W. Brockett, and G. Stein, “Future directions in control in an information-rich world,” IEEE Control Systems Magazine, vol. 23, no. 2, pp. 20–33, 2003. doi: 10.1109/MCS.2003.1188769
|
| [3] |
O. Nelles, Nonlinear System Identification: From Classical Approaches to Neural Networks, Fuzzy Models, and Gaussian Processes. Springer Nature, 2020.
|
| [4] |
S. A. Ayankoso and M. K. Habib, “Data-driven modeling of a two-link flexible manipulator (TLFM),” in Proc. IEEE 21st Int. Conf. Research and Education in Mechatronics, 2020, pp. 1–6.
|
| [5] |
P. M. Van den Hof, “System identification-data-driven modelling of dynamic systems,” Eindhoven University of Technology, 2012.
|
| [6] |
A. Xi, T. W. Mudiyanselage, D. Tao, and C. Chen, “Balance control of a biped robot on a rotating platform based on efficient reinforcement learning,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 4, pp. 938–951, 2019. doi: 10.1109/JAS.2019.1911567
|
| [7] |
P. D. Ngo, M. Tejedor, and F. Godtliebsen, “Data-driven robust control using reinforcement learning,” Applied Sciences, vol. 12, no. 4, p. 2262, 2022. doi: 10.3390/app12042262
|
| [8] |
X. Wang, J. Sun, G. Wang, F. Allgöwer, and J. Chen, “Data-driven control of distributed event-triggered network systems,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 2, pp. 351–364, 2023. doi: 10.1109/JAS.2023.123225
|
| [9] |
Y. Yang, Z. Ding, R. Wang, H. Modares, and D. C. Wunsch, “Datadriven human-robot interaction without velocity measurement using offpolicy reinforcement learning,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 1, pp. 47–63, 2021.
|
| [10] |
Z. Chen, et al., “Bayesian filtering: From Kalman filters to particle filters, beyond,” Statistics, vol. 182, no. 1, pp. 1–69, 2003.
|
| [11] |
T. Ortmaier, M. Groger, D. H. Boehm, V. Falk, and G. Hirzinger, “Motion estimation in beating heart surgery,” IEEE Trans. Biomedical Engineering, vol. 52, no. 10, pp. 1729–1740, 2005. doi: 10.1109/TBME.2005.855716
|
| [12] |
R. K. Pearson, “Outliers in process modeling and identification,” IEEE Trans. Control Systems Technology, vol. 10, no. 1, pp. 55–63, 2002. doi: 10.1109/87.974338
|
| [13] |
B. Chen, X. Liu, H. Zhao, and J. C. Principe, “Maximum correntropy Kalman filter,” Automatica, vol. 76, pp. 70–77, 2017. doi: 10.1016/j.automatica.2016.10.004
|
| [14] |
E. Javanfar and M. Rahmani, “Optimal $\mathcal{L}_p $ filtering for discrete-time non-Gaussian dynamic systems,” IET Control Theory &Applications, vol. 15, no. 16, pp. 2111–2127, 2021.
|
| [15] |
Y. Huang, Y. Zhang, Y. Zhao, P. Shi, and J. A. Chambers, “A novel outlier-robust Kalman filtering framework based on statistical similarity measure,” IEEE Trans. Automatic Control, vol. 66, no. 6, pp. 2677–2692, 2020.
|
| [16] |
T. Zhang, S. Zhao, X. Luan, and F. Liu, “Bayesian inference for statespace models with student-t mixture distributions,” IEEE Trans. Cybernetics, 2022.
|
| [17] |
B. Shen, X. Wang, and L. Zou, “Maximum correntropy Kalman filtering for non-Gaussian systems with state saturations and stochastic nonlinearities,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 5, pp. 1223–1233, 2023. doi: 10.1109/JAS.2023.123195
|
| [18] |
L. Zou, Z. Wang, H. Geng, and X. Liu, “Set-membership filtering subject to impulsive measurement outliers: A recursive algorithm,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 2, pp. 377–388, 2021. doi: 10.1109/JAS.2021.1003826
|
| [19] |
E. Javanfar, M. Rahmani, and B. Moaveni, “Measurement-outlier robust Kalman filter for discrete-time dynamic systems,” ISA Transactions, vol. 134, pp. 256–267, 2023. doi: 10.1016/j.isatra.2022.08.031
|
| [20] |
M. Milanese, F. Ruiz, and M. Taragna, “Direct data-driven filter design for uncertain LTI systems with bounded noise,” Automatica, vol. 46, no. 11, pp. 1773–1784, 2010. doi: 10.1016/j.automatica.2010.07.006
|
| [21] |
Y. Xia, L. Dai, W. Xie, and Y. Gao, “Data-driven filter design for linear systems with quantized measurements,” IFAC-PapersOnLine, vol. 48, no. 28, pp. 697–702, 2015. doi: 10.1016/j.ifacol.2015.12.211
|
| [22] |
M. S. Turan and G. Ferrari-Trecate, “Data-driven unknown-input observers and state estimation,” IEEE Control Systems Letters, vol. 6, pp. 1424–1429, 2021.
|
| [23] |
J. Duník, O. Straka, and M. Šimandl, “On autocovariance least-squares method for noise covariance matrices estimation,” IEEE Trans. Automatic Control, vol. 62, no. 2, pp. 967–972, 2016.
|
| [24] |
T. B. Schön, A. Wills, and B. Ninness, “System identification of nonlinear state-space models,” Automatica, vol. 47, no. 1, pp. 39–49, 2011. doi: 10.1016/j.automatica.2010.10.013
|
| [25] |
P. Matisko and V. Havlena, “Noise covariances estimation for Kalman filter tuning,” IFAC Proceedings Volumes, vol. 43, no. 10, pp. 31–36, 2010. doi: 10.3182/20100826-3-TR-4015.00009
|
| [26] |
C. Magnant, A. Giremus, E. Grivel, L. Ratton, and B. Joseph, “Bayesian non-parametric methods for dynamic state-noise covariance matrix estimation: Application to target tracking,” Signal Processing, vol. 127, pp. 135–150, 2016. doi: 10.1016/j.sigpro.2016.02.013
|
| [27] |
O. Kost, J. Duník, and O. Straka, “Noise moment and parameter estimation of state-space model,” IFAC-PapersOnLine, vol. 51, no. 15, pp. 891–896, 2018. doi: 10.1016/j.ifacol.2018.09.107
|
| [28] |
Y. Huang, Y. Zhang, P. Shi, Z. Wu, J. Qian, and J. A. Chambers, “Robust Kalman filters based on Gaussian scale mixture distributions with application to target tracking,” IEEE Trans. Systems,Man,Cybernetics: Systems, vol. 49, no. 10, pp. 2082–2096, 2017.
|
| [29] |
H. Zhu, G. Zhang, Y. Li, and H. Leung, “A novel robust Kalman filter with unknown non-stationary heavy-tailed noise,” Automatica, vol. 127, p. 109511, 2021. doi: 10.1016/j.automatica.2021.109511
|
| [30] |
R. Xu and D. Wunsch, “Survey of clustering algorithms,” IEEE Trans. Neural Networks, vol. 16, no. 3, pp. 645–678, 2005. doi: 10.1109/TNN.2005.845141
|
| [31] |
P. Wittek, Quantum Machine Learning: What Quantum Computing Means to Data Mining. Academic Press, 2014.
|
| [32] |
G. J. McLachlan and T. Krishnan, The EM Algorithm and Extensions. John Wiley & Sons, 2007.
|
| [33] |
G. J. McLachlan and D. Peel, Finite Mixture Models. John Wiley & Sons, 2004.
|
| [34] |
S. S. Khan and A. Ahmad, “Cluster center initialization algorithm for K-means clustering,” Pattern Recognition Letters, vol. 25, no. 11, pp. 1293–1302, 2004. doi: 10.1016/j.patrec.2004.04.007
|
| [35] |
D. Arthur and S. Vassilvitskii, “K-Means++: The advantages of careful seeding,” in Proc. Symp Discrete Algorithms, 2007, pp. 1027–1035.
|
| [36] |
F. Lindsten, H. Ohlsson, and L. Ljung, “Clustering using sum-of-norms regularization: With application to particle filter output computation,” in Proc. IEEE Statistical Signal Processing Workshop, 2011, pp. 201–204.
|
| [37] |
F. Lindsten, H. Ohlsson, and L. Ljung, “Just relax and come clustering! A convexification of K-means clustering,” Linkping University, The Institute of Technology, Tech. Rep., 2011.
|
| [38] |
K. Villaverde, O. Kosheleva, and M. Ceberio, “Why ellipsoid constraints, ellipsoid clusters, and Riemannian space-time: Dvoretzkys Theorem revisited,” in Constraint Programming and Decision Making. Springer Int. Publishing, 2014, pp. 203–207.
|
| [39] |
P. J. Green, “Iteratively reweighted least squares for maximum likelihood estimation, some robust and resistant alternatives,” Journal of the Royal Statistical Society: Series B (Methodological), vol. 46, no. 2, pp. 149–170, 1984. doi: 10.1111/j.2517-6161.1984.tb01288.x
|
| [40] |
M. Abolhasani and M. Rahmani, “Robust Kalman filtering for discretetime time-varying systems with stochastic and norm-bounded uncertainties,” Journal of Dynamic Systems,Measurement,Control, vol. 140, no. 3, p. 030901, 2018. doi: 10.1115/1.4037777
|
Figures(3) / Tables(2)






 DownLoad:
DownLoad: