A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 2
Volume 11
Issue 2
IEEE/CAA Journal of Automatica Sinica
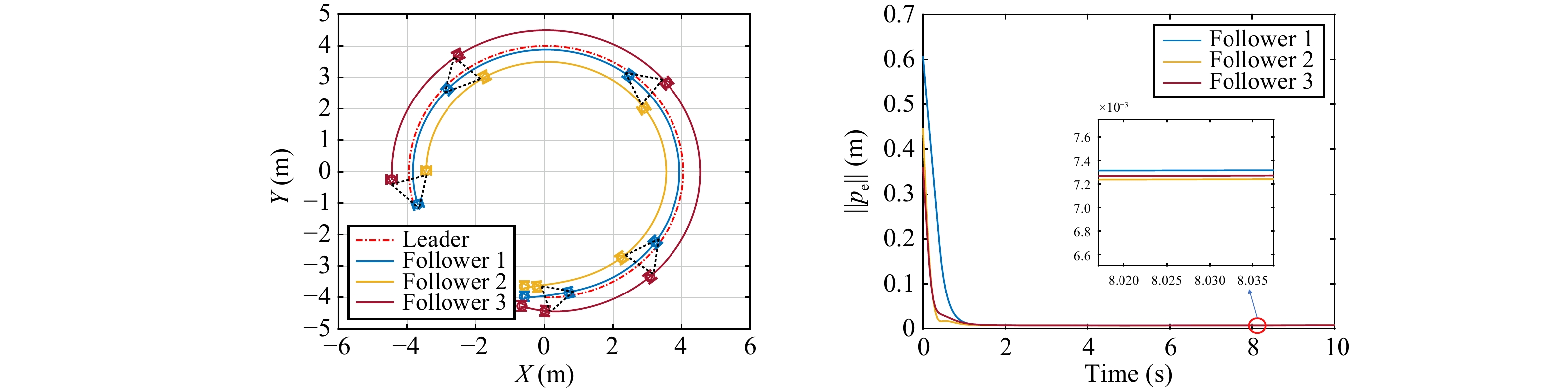
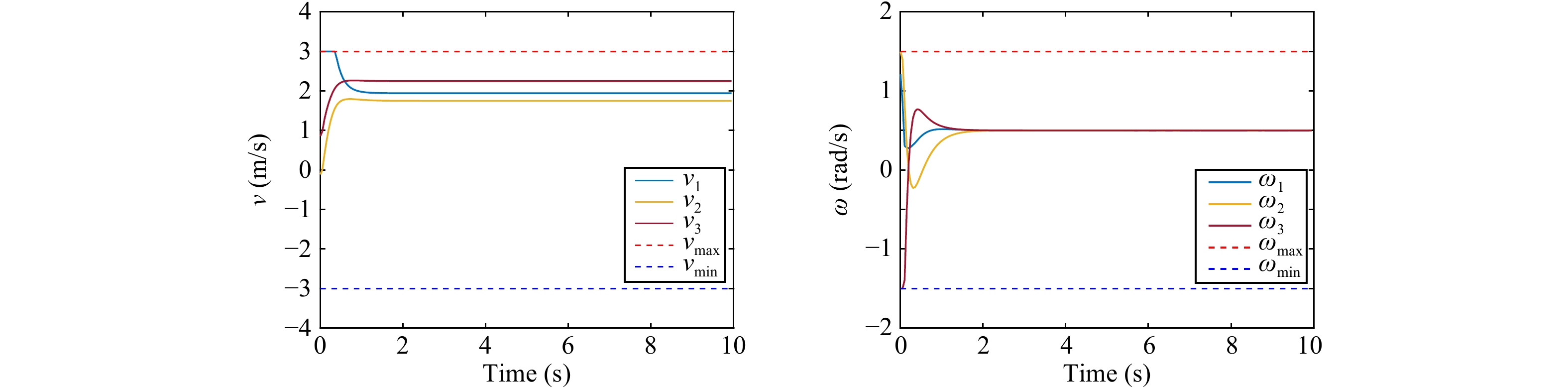
| Citation: | Z. Luo, B. Zhu, J. Zheng, and Z. Zheng, “Robust distributed model predictive control for formation tracking of nonholonomic vehicles,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 2, pp. 560–562, Feb. 2024. doi: 10.1109/JAS.2023.123732

|

| [1] |
K.-K. Oh, M.-C. Park, and H.-S. Ahn, “A survey of multi-agent formation control,” Automatica, vol. 53, pp. 424–440, 2015. doi: 10.1016/j.automatica.2014.10.022
|
| [2] |
A. Amini, A. Asif, and A. Mohammadi, “Formation-containment control using dynamic event-triggering mechanism for multi-agent systems,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 5, pp. 1235–1248, 2020.
|
| [3] |
C. E. Luis and A. P. Schoellig, “Trajectory generation for multiagent point-to-point transitions via distributed model predictive control,” IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 375–382, 2019. doi: 10.1109/LRA.2018.2890572
|
| [4] |
G. Franzè, F. Tedesco, and D. Famularo, “Resilience against replay attacks: A distributed model predictive control scheme for networked multi-agent systems,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 3, pp. 628–640, 2020.
|
| [5] |
A. Nawaz, J. Wu, J. Ye, Y. Dong, and C. Long, “Distributed MPC-based energy scheduling for islanded multi-microgrid considering battery degradation and cyclic life deterioration,” Applied Energy, vol. 329, p. 120168, 2023. doi: 10.1016/j.apenergy.2022.120168
|
| [6] |
Y. Chen and B. Zhu, “Distributed fixed-time control of high-order multi-agent systems with non-holonomic constraints,” J. Franklin Institute, vol. 358, no. 6, pp. 2948–2963, 2021. doi: 10.1016/j.jfranklin.2021.02.006
|
| [7] |
Z. Sun, Y. Xia, L. Dai, K. Liu, and D. Ma, “Disturbance rejection mpc for tracking of wheeled mobile robot,” IEEE/ASME Trans. Mechatronics, vol. 22, no. 6, pp. 2576–2587, 2017. doi: 10.1109/TMECH.2017.2758603
|
| [8] |
D. Qin, A. Liu, D. Zhang, and H. Ni, “Formation control of mobile robot systems incorporating primal-dual neural network and distributed predictive approach,” J. Franklin Institute, vol. 357, no. 17, pp. 12 454–12 472, 2020. doi: 10.1016/j.jfranklin.2020.09.025
|
| [9] |
Z. Sun, L. Dai, K. Liu, Y. Xia, and K. H. Johansson, “Robust MPC for tracking constrained unicycle robots with additive disturbances,” Automatica, vol. 90, pp. 172–184, 2018. doi: 10.1016/j.automatica.2017.12.048
|
Figures(3)






 DownLoad:
DownLoad: