A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 11
Issue 2
Volume 11
Issue 2
IEEE/CAA Journal of Automatica Sinica
| Citation: | J. Yang, C. Yang, X. Zhang, and J. Na, “Fixed-time sliding mode control with varying exponent coefficient for modular reconfigurable flight arrays,” IEEE/CAA J. Autom. Sinica, vol. 11, no. 2, pp. 514–528, Feb. 2024. doi: 10.1109/JAS.2023.123645

|
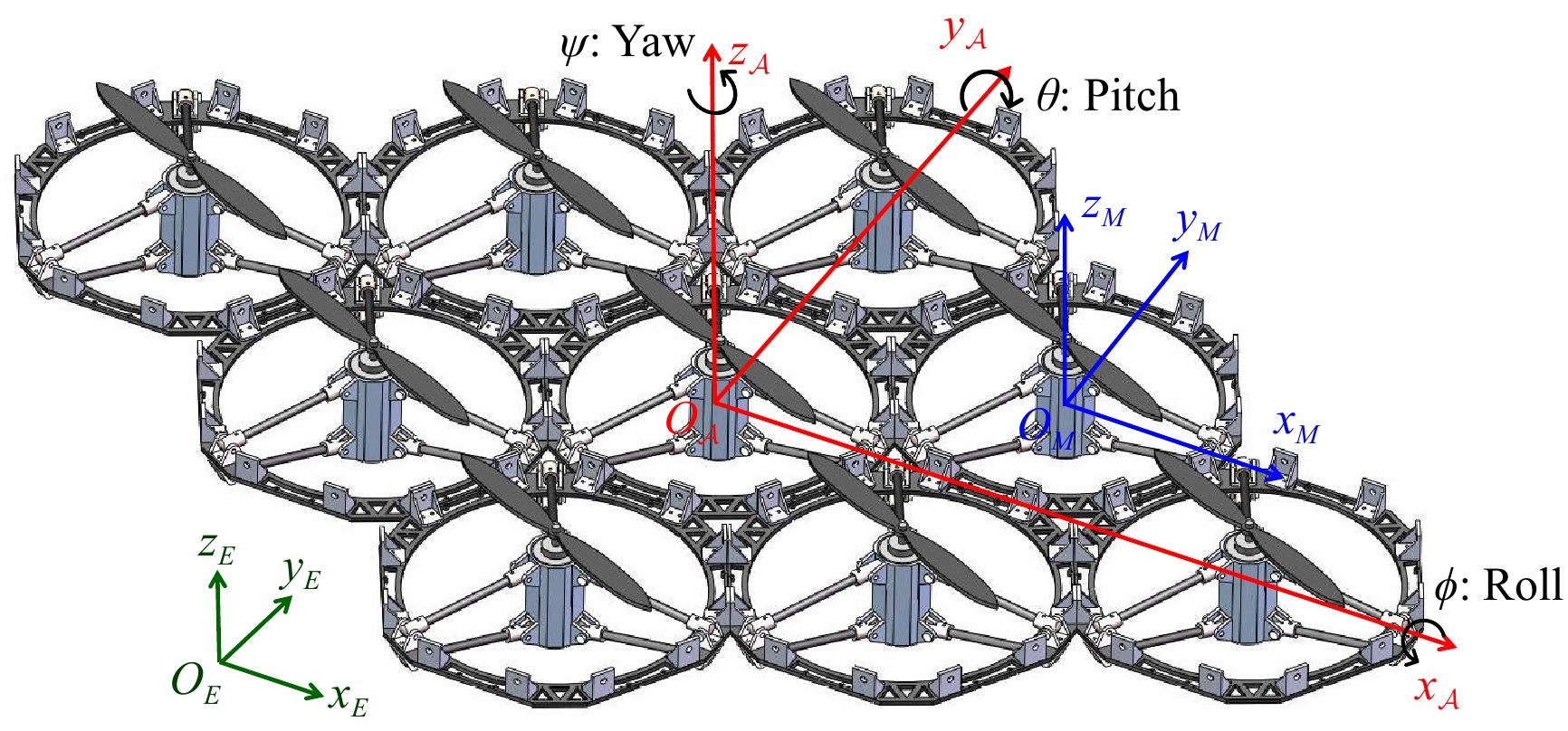
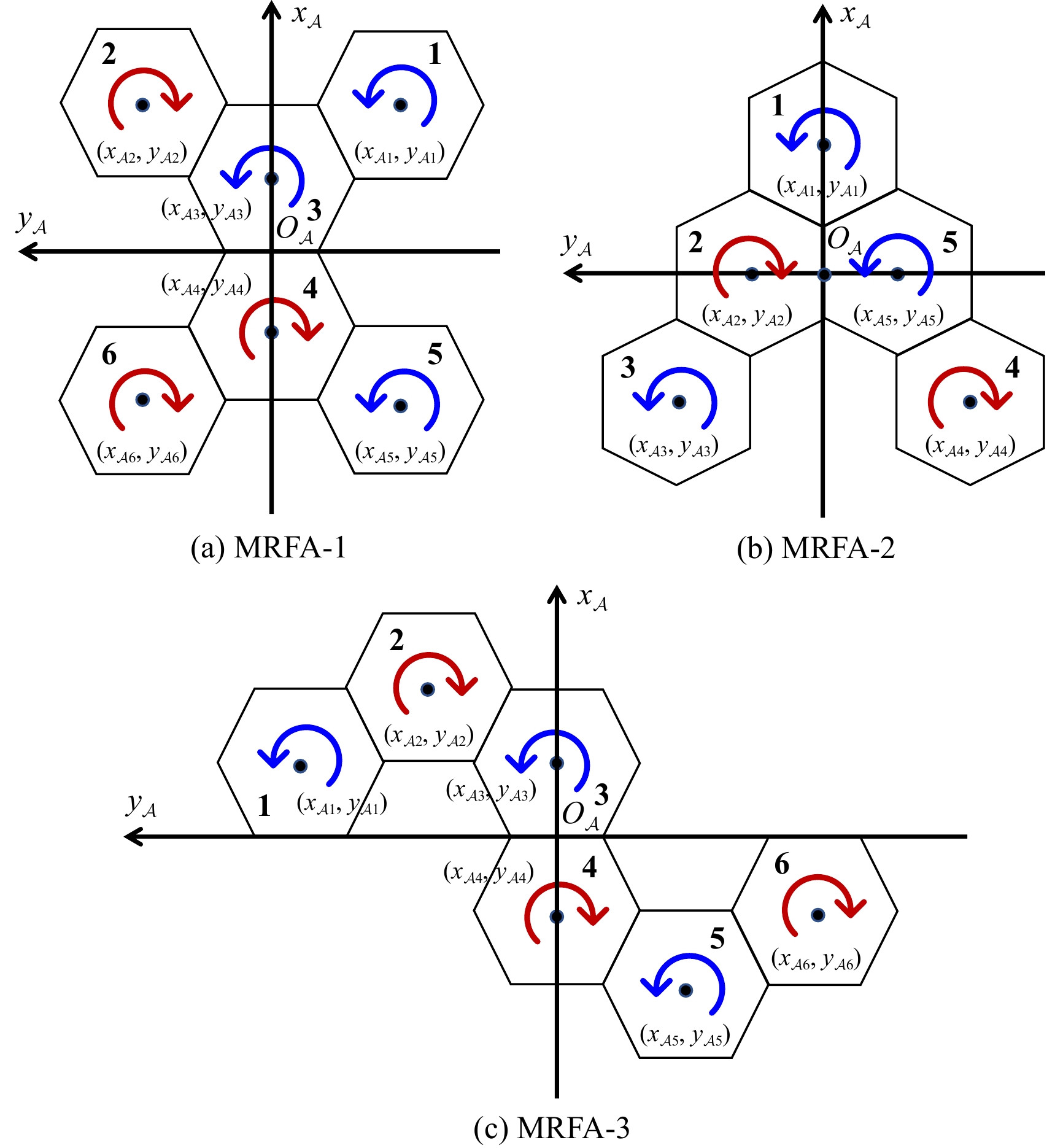
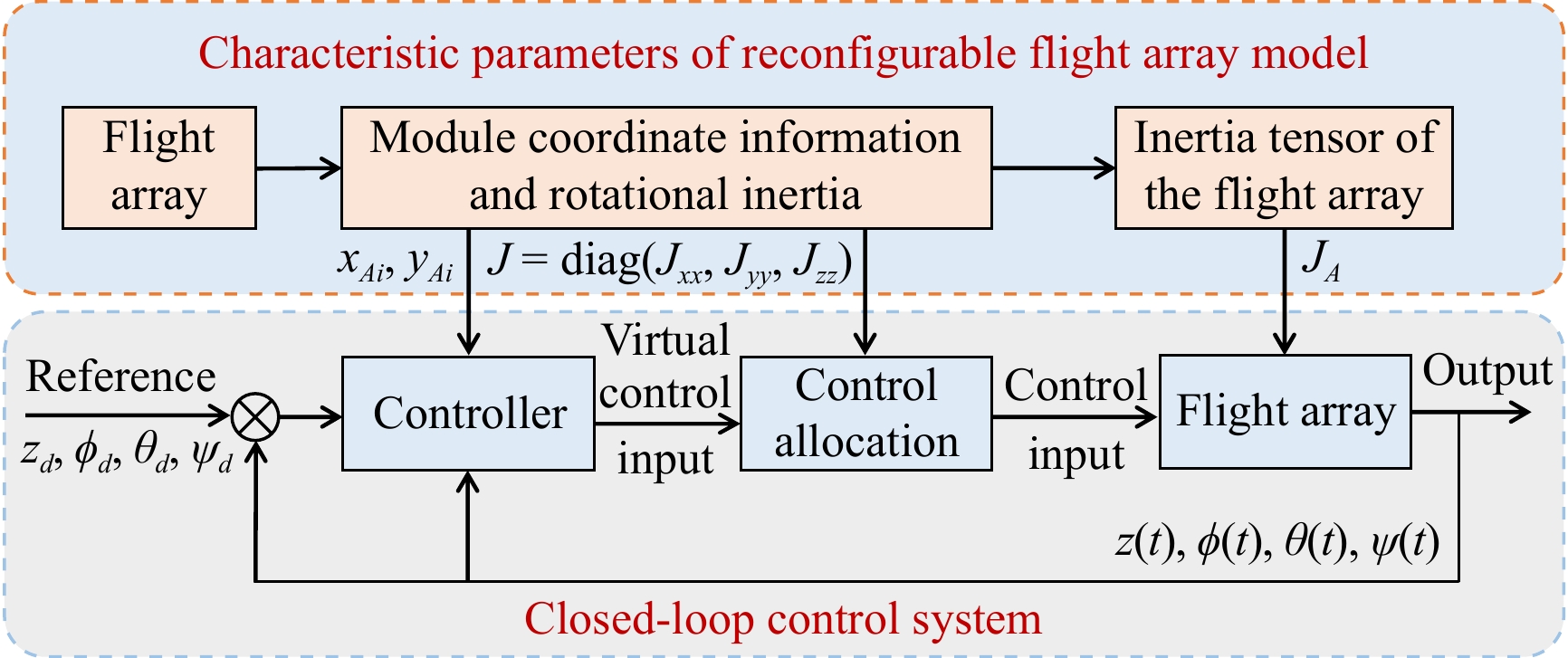
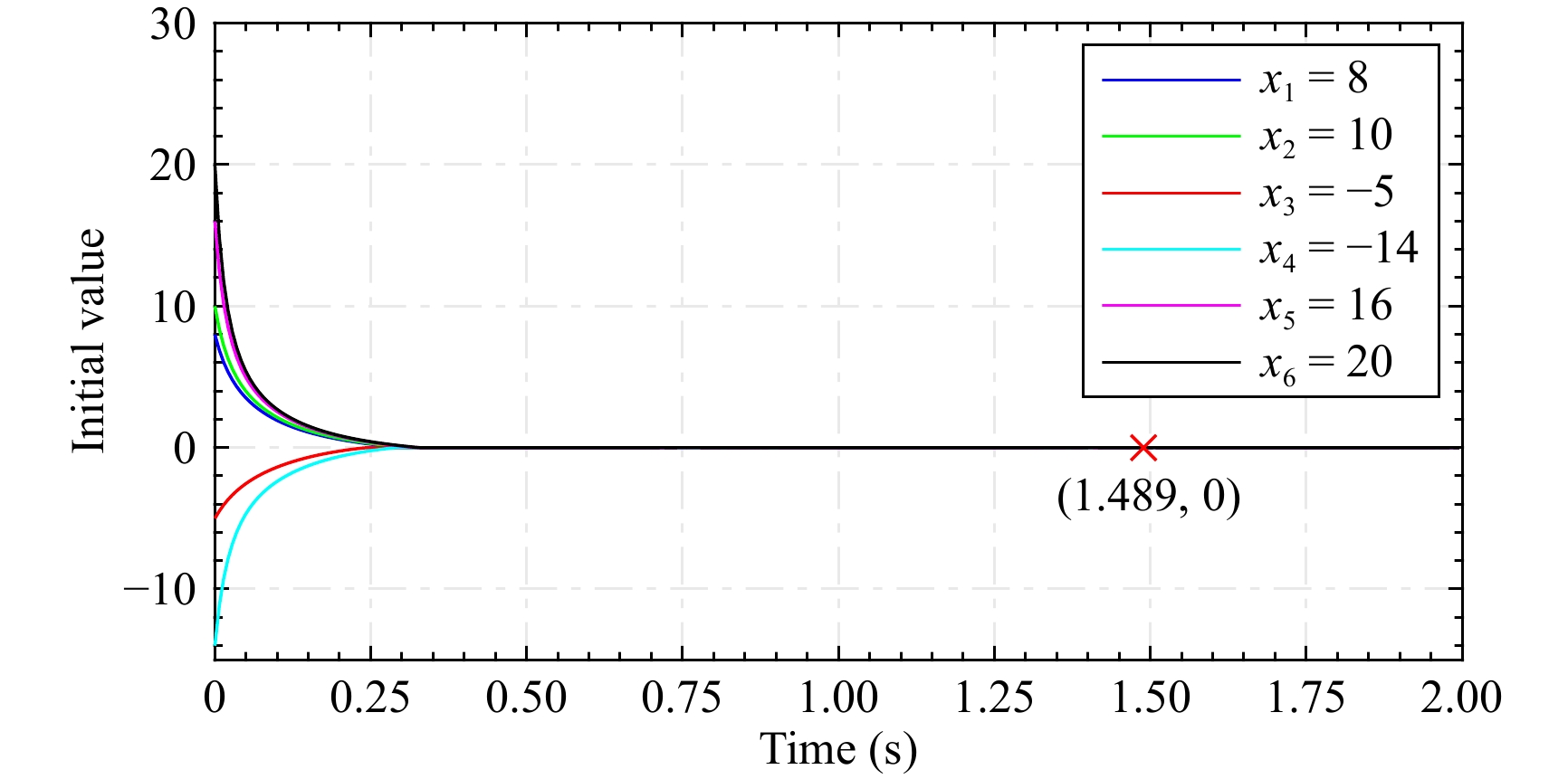
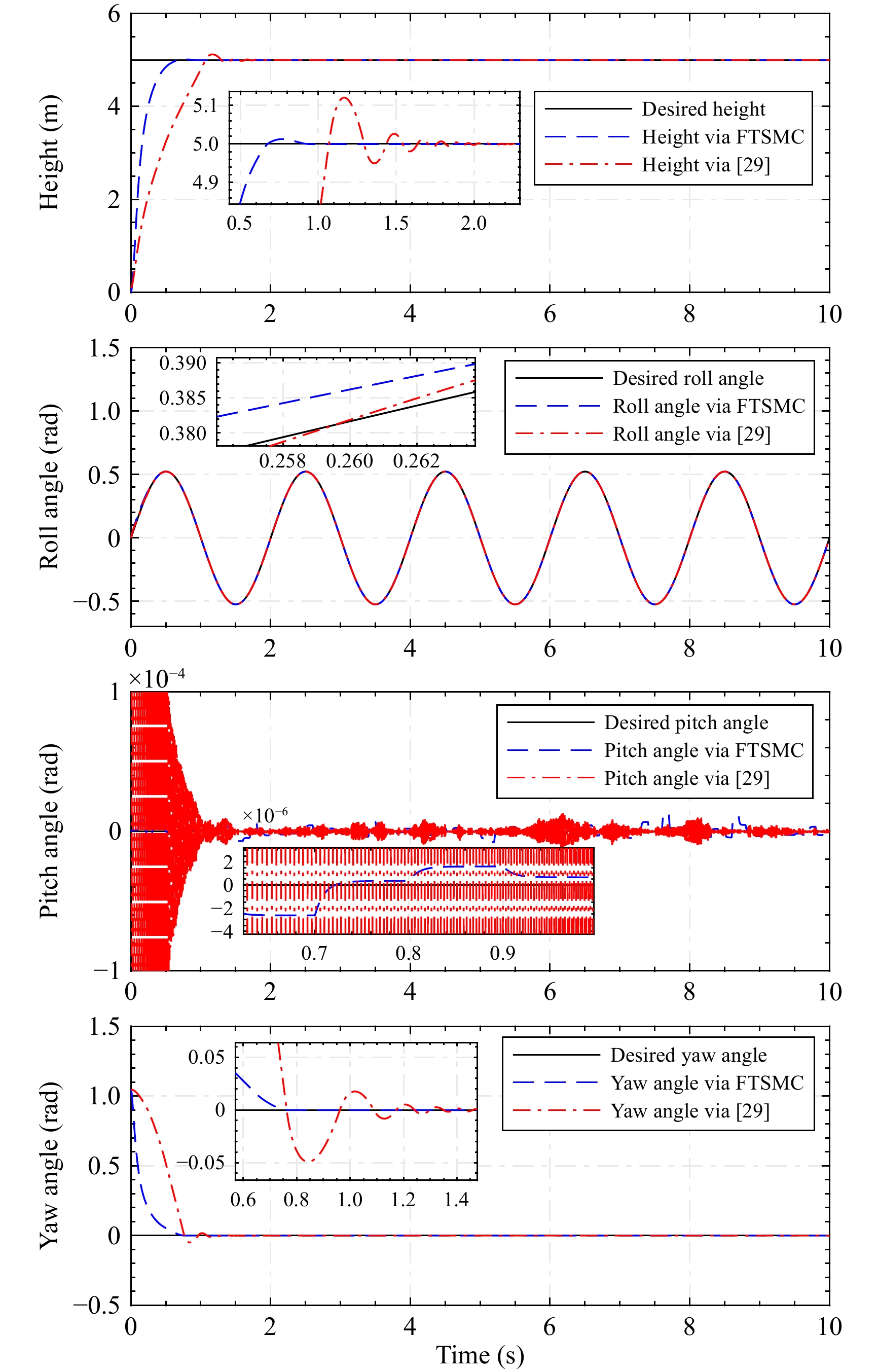
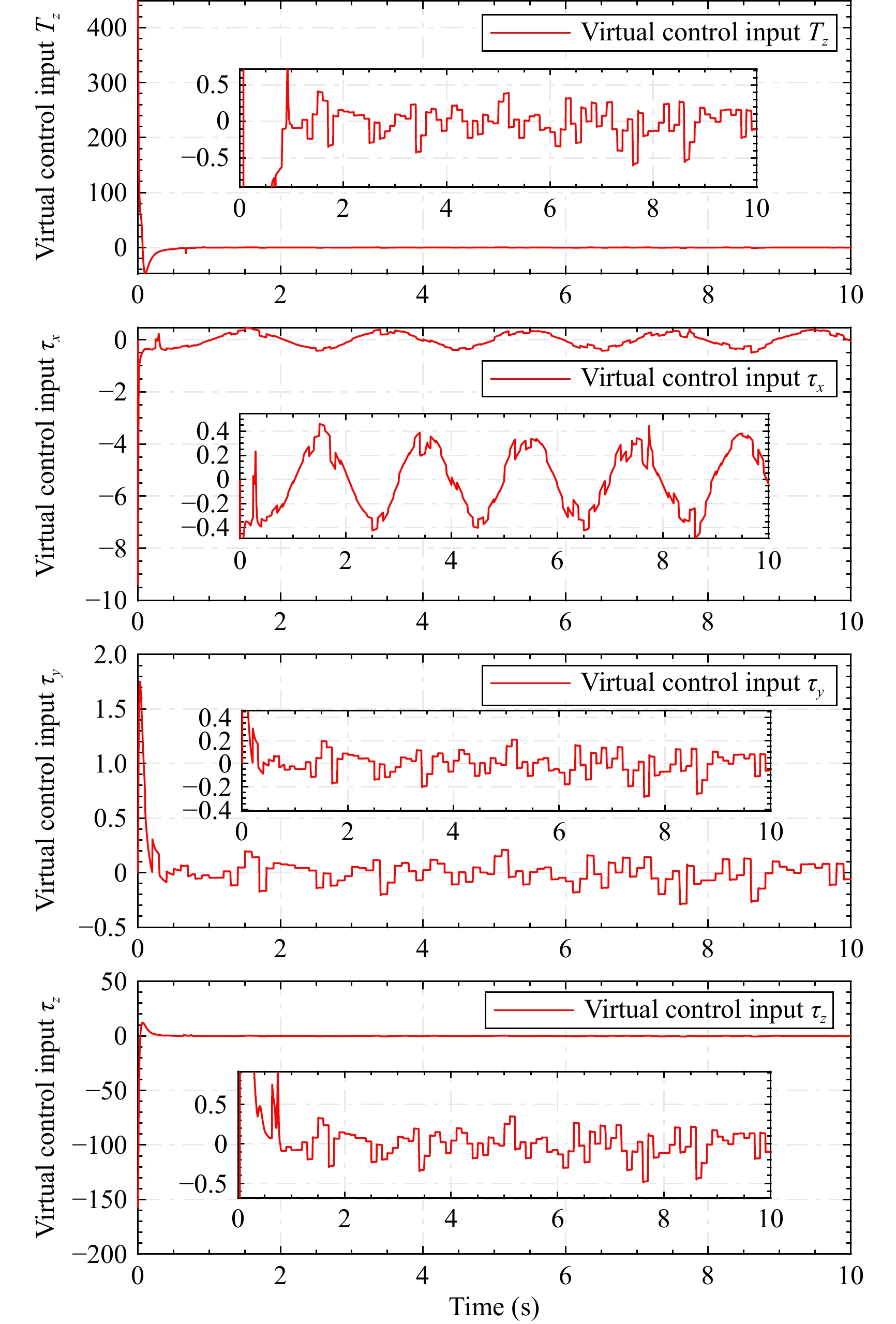
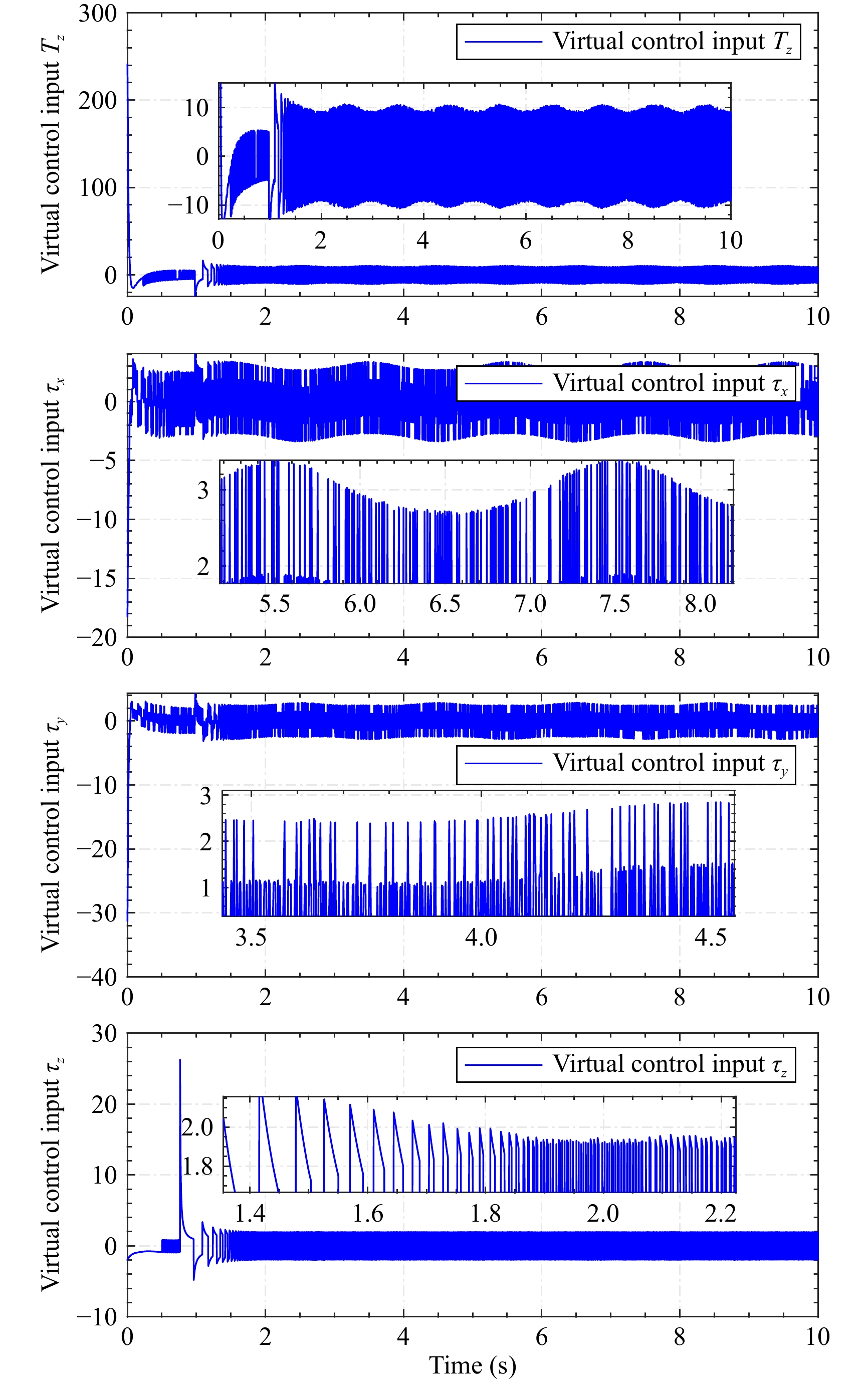
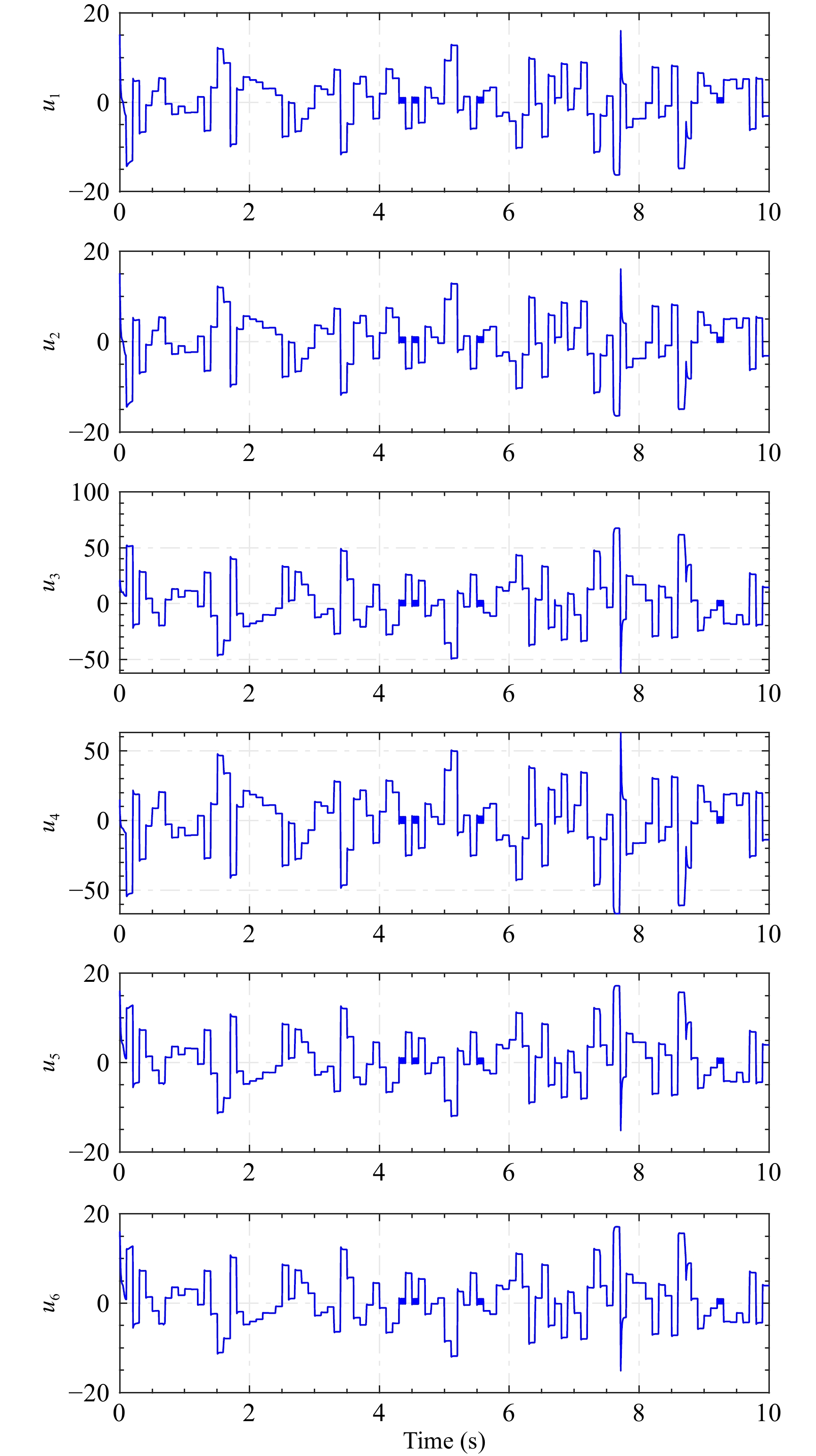
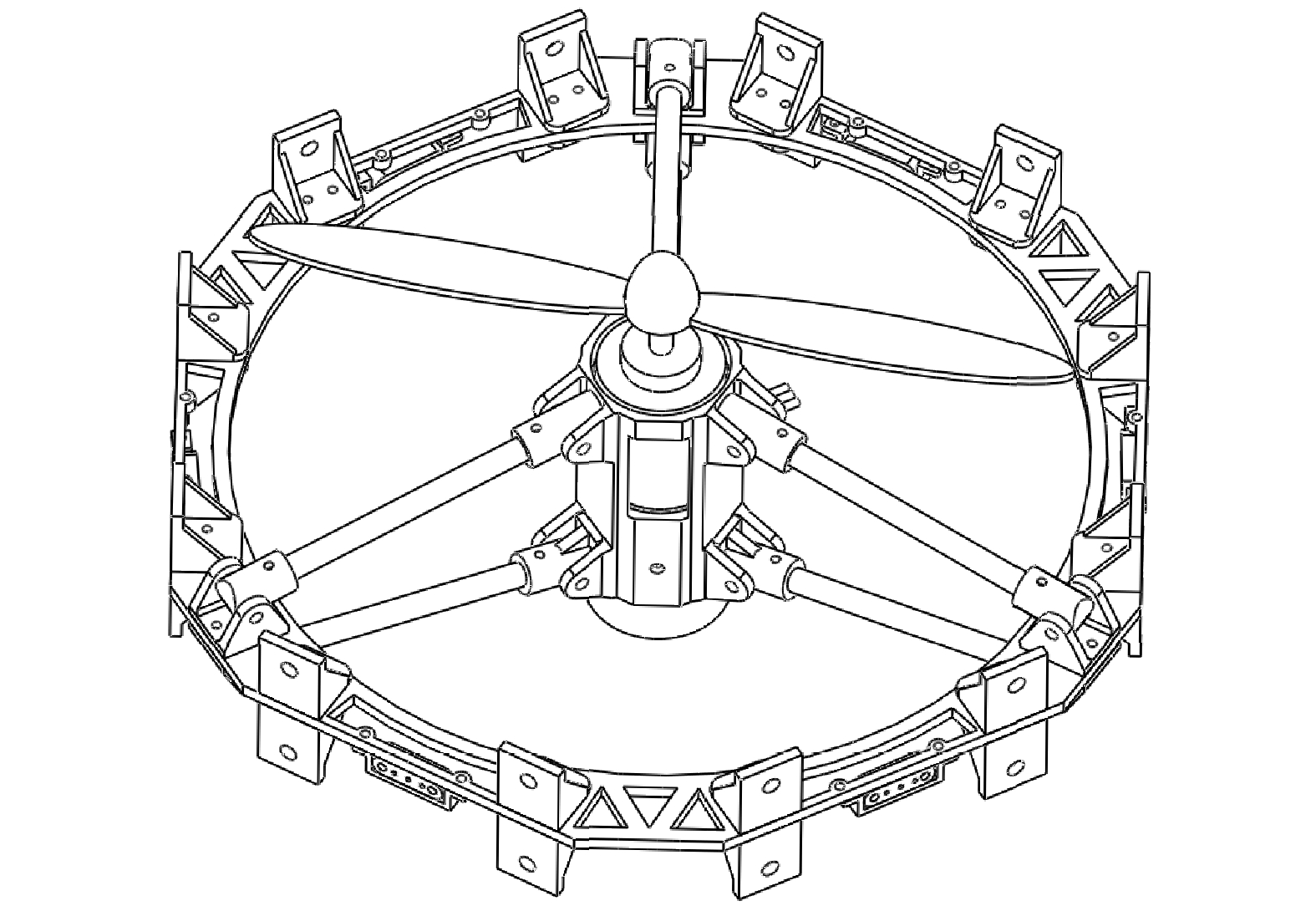
The modular system can change its physical structure by self-assembly and self-disassembly between modules to dynamically adapt to task and environmental requirements. Recognizing the adaptive capability of modular systems, we introduce a modular reconfigurable flight array (MRFA) to pursue a multifunction aircraft fitting for diverse tasks and requirements, and investigate the attitude control and the control allocation problem by using the modular reconfigurable flight array as a platform. First, considering the variable and irregular topological configuration of the modular array, a center-of-mass-independent flight array dynamics model is proposed to allow control allocation under over-actuated situations. Secondly, in order to meet the stable, fast and accurate attitude tracking performance of the MRFA, a fixed-time convergent sliding mode controller with state-dependent variable exponent coefficients is proposed to ensure fast convergence rate both away from and near the system equilibrium point without encountering the singularity. It is shown that the controller also has fixed-time convergent characteristics even in the presence of external disturbances. Finally, simulation results are provided to demonstrate the effectiveness of the proposed modeling and control strategies.

| [1] |
Y. Tan and B. Chen, “Thruster allocation and mapping of aerial and aquatic modes for a morphable multimodal quadrotor,” IEEE/ASME Trans. Mechatronics, vol. 25, no. 4, pp. 2065–2074, Aug. 2020. doi: 10.1109/TMECH.2020.2998329
|
| [2] |
Q. Tan, X. Zhang, H. Liu, S. Jiao, M. Zhou, and J. Li, “Multimodal dynamics analysis and control for amphibious fly-drive vehicle,” IEEE/ASME Trans. Mechatronics, vol. 26, no. 2, pp. 621–632, Apr. 2021. doi: 10.1109/TMECH.2021.3056095
|
| [3] |
Y. Chen, R. Yu, Y. Zhang, and C. Liu, “Circular formation flight control for unmanned aerial vehicles with directed network and external disturbance,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 2, pp. 505–516, Mar. 2019.
|
| [4] |
L. He, P. Bai, X. Liang, J. Zhang, and W. Wang, “Feedback formation control of UAV swarm with multiple implicit leaders,” Aerospace Science and Technology, vol. 72, pp. 327–334, Jan. 2018. doi: 10.1016/j.ast.2017.11.020
|
| [5] |
K. McGuire, C. De Wagter, K. Tuyls, H. Kappen, and G. C. de Croon, “Minimal navigation solution for a swarm of tiny flying robots to explore an unknown environment,” Science Robotics, vol. 4, no. 35, p. eaaw9710, Oct. 2019. doi: 10.1126/scirobotics.aaw9710
|
| [6] |
X. Zhou, X. Wen, Z. Wang, Y. Gao, H. Li, Q. Wang, T. Yang, H. Lu, Y. Cao, C. Xu, and F. Gao, “Swarm of micro flying robots in the wild,” Science Robotics, vol. 7, no. 66, p. eabm5954, May 2022. doi: 10.1126/scirobotics.abm5954
|
| [7] |
R. Oung and R. D’Andrea, “The distributed flight array: Design, implementation, and analysis of a modular vertical take-off and landing vehicle,” The Int. J. Robotics Research, vol. 33, no. 3, pp. 375–400, 2014. doi: 10.1177/0278364913501212
|
| [8] |
T. Anzai, M. Zhao, M. Murooka, F. Shi, K. Okada, and M. Inaba, “Design, modeling and control of fully actuated 2D transformable aerial robot with 1 DoF thrust vectorable link module,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, 2019, pp. 2820–2826.
|
| [9] |
B. Mu and P. Chirarattananon, “Universal flying objects: Modular multirotor system for flight of RIGID objects,” IEEE Trans. Robotics, vol. 36, no. 2, pp. 458–471, Apr. 2020. doi: 10.1109/TRO.2019.2954679
|
| [10] |
N. Zhao, W. Yang, C. Peng, G. Wang, and Y. Shen, “Comparative validation study on bioinspired morphology-adaptation flight performance of a morphing quad-rotor,” IEEE Robotics and Automation Letters, vol. 6, no. 3, pp. 5145–5152, Jul. 2021. doi: 10.1109/LRA.2021.3071673
|
| [11] |
S. Bai and P. Chirarattananon, “Splitflyer air: A modular quadcopter that disassembles into two bicopters mid-air,” IEEE/ASME Trans. Mechatronics, vol. 27, no. 6, pp. 4729–4740, Dec. 2022. doi: 10.1109/TMECH.2022.3164886
|
| [12] |
D. Saldana, P. M. Gupta, and V. Kumar, “Design and control of aerial modules for inflight self-disassembly,” IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 3410–3417, Oct. 2019. doi: 10.1109/LRA.2019.2926680
|
| [13] |
B. Li, L. Ma, D. Huang, and Y. Sun, “A flexibly assembled and maneuverable reconfigurable modular multirotor aerial vehicle,” IEEE/ASME Trans. Mechatronics, vol. 27, no. 3, pp. 1704–1714, Jun. 2022. doi: 10.1109/TMECH.2021.3092043
|
| [14] |
S. Park, J. Lee, J. Ahn, M. Kim, J. Her, G.-H. Yang, and D. Lee, “ODAR: Aerial manipulation platform enabling omnidirectional wrench generation,” IEEE/ASME Trans. Mechatronics, vol. 23, no. 4, pp. 1907–1918, Aug. 2018. doi: 10.1109/TMECH.2018.2848255
|
| [15] |
R. Naldi, F. Forte, A. Serrani, and L. Marconi, “Modeling and control of a class of modular aerial robots combining under actuated and fully actuated behavior,” IEEE Trans. Control Systems Technology, vol. 23, no. 5, pp. 1869–1885, Sept. 2015. doi: 10.1109/TCST.2015.2391173
|
| [16] |
Y. Su, L. Ruan, P. Yu, C.-H. Pi, M. J. Gerber, and T.-C. Tsao, “A fast and efficient attitude control algorithm of a tilt-rotor aerial platform using inputs redundancies,” IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 1214–1221, Apr. 2022. doi: 10.1109/LRA.2021.3138806
|
| [17] |
T. Maki, M. Zhao, K. Okada, and M. Inaba, “Elastic vibration suppression control for multilinked aerial robot using redundant degrees-of-freedom of thrust force,” IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 2859–2866, Apr. 2022. doi: 10.1109/LRA.2022.3145060
|
| [18] |
M. Zhao, T. Anzai, F. Shi, T. Maki, T. Nishio, K. Ito, N. Kuromiya, K. Okada, and M. Inaba, “Versatile multilinked aerial robot with tilted propellers: Design, modeling, control, and state estimation for autonomous flight and manipulation,” J. Field Robotics, vol. 38, no. 7, pp. 933–966, Apr. 2021. doi: 10.1002/rob.22019
|
| [19] |
V. Utkin, “Variable structure systems with sliding modes,” IEEE Trans. Automatic Control, vol. 22, no. 2, pp. 212–222, Apr. 1977. doi: 10.1109/TAC.1977.1101446
|
| [20] |
Z. Zuo, C. Liu, Q.-L. Han, and J. Song, “Unmanned aerial vehicles: Control methods and future challenges,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 4, pp. 601–604, Apr. 2022. doi: 10.1109/JAS.2022.105410
|
| [21] |
C. Peng, Y. Bai, X. Gong, Q. Gao, C. Zhao, and Y. Tian, “Modeling and robust backstepping sliding mode control with adaptive RBFNN for a novel coaxial eight-rotor UAV,” IEEE/CAA J. Autom. Sinica, vol. 2, no. 1, pp. 56–64, Jan. 2015. doi: 10.1109/JAS.2015.7032906
|
| [22] |
S. Yi and J. Zhai, “Adaptive second-order fast nonsingular terminal sliding mode control for robotic manipulators,” ISA Trans., vol. 90, pp. 41–51, Jul. 2019. doi: 10.1016/j.isatra.2018.12.046
|
| [23] |
F. Zhang, “High-speed nonsingular terminal switched sliding mode control of robot manipulators,” IEEE/CAA J. Autom. Sinica, vol. 4, no. 4, pp. 775–781, Oct. 2017. doi: 10.1109/JAS.2016.7510157
|
| [24] |
L. Qiao and W. Zhang, “Trajectory tracking control of AUVs via adaptive fast nonsingular integral terminal sliding mode control,” IEEE Trans. Industrial Informatics, vol. 16, no. 2, pp. 1248–1258, Feb. 2020. doi: 10.1109/TII.2019.2949007
|
| [25] |
S. Ding, L. Liu, and W. X. Zheng, “Sliding mode direct yaw-moment control design for in-wheel electric vehicles,” IEEE Trans. Industrial Electronics, vol. 64, no. 8, pp. 6752–6762, Aug. 2017. doi: 10.1109/TIE.2017.2682024
|
| [26] |
L. Qiao and W. Zhang, “Adaptive non-singular integral terminal sliding mode tracking control for autonomous underwater vehicles,” IET Control Theory &Applications, vol. 11, no. 8, pp. 1293–1306, Mar. 2017.
|
| [27] |
S. Lian, W. Meng, Z. Lin, K. Shao, J. Zheng, H. Li, and R. Lu, “Adaptive attitude control of a quadrotor using fast nonsingular terminal sliding mode,” IEEE Trans. Industrial Electronics, vol. 69, no. 2, pp. 1597–1607, Feb. 2022. doi: 10.1109/TIE.2021.3057015
|
| [28] |
A. Polyakov, “Nonlinear feedback design for fixed-time stabilization of linear control systems,” IEEE Trans. Automatic Control, vol. 57, no. 8, pp. 2106–2110, Aug. 2012. doi: 10.1109/TAC.2011.2179869
|
| [29] |
E. Moulay, V. Léchappé, E. Bernuau, and F. Plestan, “Robust fixed-time stability: Application to sliding-mode control,” IEEE Trans. Automatic Control, vol. 67, no. 2, pp. 1061–1066, Feb. 2022. doi: 10.1109/TAC.2021.3069667
|
| [30] |
Z. Zuo, “Nonsingular fixed-time consensus tracking for second-order multi-agent networks,” Automatica, vol. 54, pp. 305–309, Apr. 2015. doi: 10.1016/j.automatica.2015.01.021
|
| [31] |
H. Li and Y. Cai, “On sftsm control with fixed-time convergence,” IET Control Theory &Applications, vol. 11, no. 6, pp. 766–773, Feb. 2017.
|
| [32] |
L. Cao, B. Xiao, M. Golestani, and D. Ran, “Faster fixed-time control of flexible spacecraft attitude stabilization,” IEEE Trans. Industrial Informatics, vol. 16, no. 2, pp. 1281–1290, Feb. 2020. doi: 10.1109/TII.2019.2949588
|
| [33] |
B. Ning, Q.-L. Han, Z. Zuo, L. Ding, Q. Lu, and X. Ge, “Fixed-time and prescribed-time consensus control of multiagent systems and its applications: A survey of recent trends and methodologies,” IEEE Trans. Industrial Informatics, vol. 19, no. 2, pp. 1121–1135, Feb. 2022.
|
| [34] |
L. Yu, G. He, X. Wang, and S. Zhao, “Robust fixed-time sliding mode attitude control of tilt trirotor UAV in helicopter mode,” IEEE Trans. Industrial Electronics, vol. 69, no. 10, pp. 10322–10332, Oct. 2022. doi: 10.1109/TIE.2021.3118556
|
| [35] |
X. Shao, B. Tian, and W. Yang, “Fixed-time trajectory following for quadrotors via output feedback,” ISA Trans., vol. 110, pp. 213–224, Apr. 2021. doi: 10.1016/j.isatra.2020.10.039
|
| [36] |
Z. Gao and G. Guo, “Fixed-time sliding mode formation control of AUVs based on a disturbance observer,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 2, pp. 539–545, Mar. 2020. doi: 10.1109/JAS.2020.1003057
|
| [37] |
W. Gong, B. Li, Y. Yang, H. Ban, and B. Xiao, “Fixed-time integral-type sliding mode control for the quadrotor UAV attitude stabilization under actuator failures,” Aerospace Science and Technology, vol. 95, p. 105444, 2019. doi: 10.1016/j.ast.2019.105444
|
| [38] |
Z. Zuo, “Non-singular fixed-time terminal sliding mode control of non-linear systems,” IET Control Theory &Applications, vol. 9, no. 4, pp. 545–552, Feb. 2015.
|
| [39] |
D. Saldaña, B. Gabrich, G. Li, M. Yim, and V. Kumar, “ModQuad: The flying modular structure that self-assembles in midair,” in Proc. IEEE Int. Conf. Robotics and Automation, 2018, pp. 691–698.
|
| [40] |
Y. Guo, B. Jiang, and Y. Zhang, “A novel robust attitude control for quadrotor aircraft subject to actuator faults and wind gusts,” IEEE/CAA J. Autom. sinica, vol. 5, no. 1, pp. 292–300, Jan. 2018. doi: 10.1109/JAS.2017.7510679
|
| [41] |
B. Gabrich, D. Saldaña, and M. Yim, “Finding structure configurations for flying modular robots,” in Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems, 2021, pp. 6970–6976.
|
| [42] |
H. Alwi and C. Edwards, “Fault tolerant control using sliding modes with on-line control allocation,” Automatica, vol. 44, no. 7, pp. 1859–1866, Jul. 2008. doi: 10.1016/j.automatica.2007.10.034
|
| [43] |
M. Kriegleder, “Asynchronous distributed averaging, cooperative tilt estimation, and modular robotic self-assembly,” Ph.D. dissertation, ETH Zurich, Switzerland, 2017.
|
| [44] |
S. P. Madruga, A. H. Tavares, S. O. Luiz, T. P. do Nascimento, and A. M. N. Lima, “Aerodynamic effects compensation on multi-rotor UAVs based on a neural network control allocation approach,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 2, pp. 295–312, Feb. 2022. doi: 10.1109/JAS.2021.1004266
|
| [45] |
S. P. Bhat and D. S. Bernstein, “Finite-time stability of continuous autonomous systems,” SIAM J. Control and optimization, vol. 38, no. 3, pp. 751–766, Feb. 2000. doi: 10.1137/S0363012997321358
|
| [46] |
B. Ning, Q.-L. Han, and L. Ding, “Distributed finite-time secondary frequency and voltage control for islanded microgrids with communication delays and switching topologies,” IEEE Trans. Cyber., vol. 51, no. 8, pp. 3988–3999, Aug. 2021. doi: 10.1109/TCYB.2020.3003690
|
| [47] |
Z. Zhu, Y. Xia, and M. Fu, “Attitude stabilization of rigid spacecraft with finite-time convergence,” Int. J. Robust and Nonlinear Control, vol. 21, no. 6, pp. 686–702, Apr. 2011. doi: 10.1002/rnc.1624
|
| [48] |
C. Yang, T. Teng, B. Xu, Z. Li, J. Na, and C.-Y. Su, “Global adaptive tracking control of robot manipulators using neural networks with finite-time learning convergence,” Int. J. Control,Automation and Systems, vol. 15, no. 4, pp. 1916–1924, Jul. 2017. doi: 10.1007/s12555-016-0515-7
|
| [49] |
Y. Zhang, S. Tang, and J. Guo, “Adaptive terminal angle constraint interception against maneuvering targets with fast fixed-time convergence,” Int. J. Robust and Nonlinear Control, vol. 28, no. 8, pp. 2996–3014, May 2018. doi: 10.1002/rnc.4067
|
Figures(12) / Tables(5)






 DownLoad:
DownLoad: