A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 10
Volume 10
Issue 10
IEEE/CAA Journal of Automatica Sinica
| Citation: | Q. H. Zhu, H. P. Li, C. Wang, and Y. Hou, “Scheduling a single-arm multi-cluster tool with a condition-based cleaning operation,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 10, pp. 1965–1983, Oct. 2023. doi: 10.1109/JAS.2023.123327

|
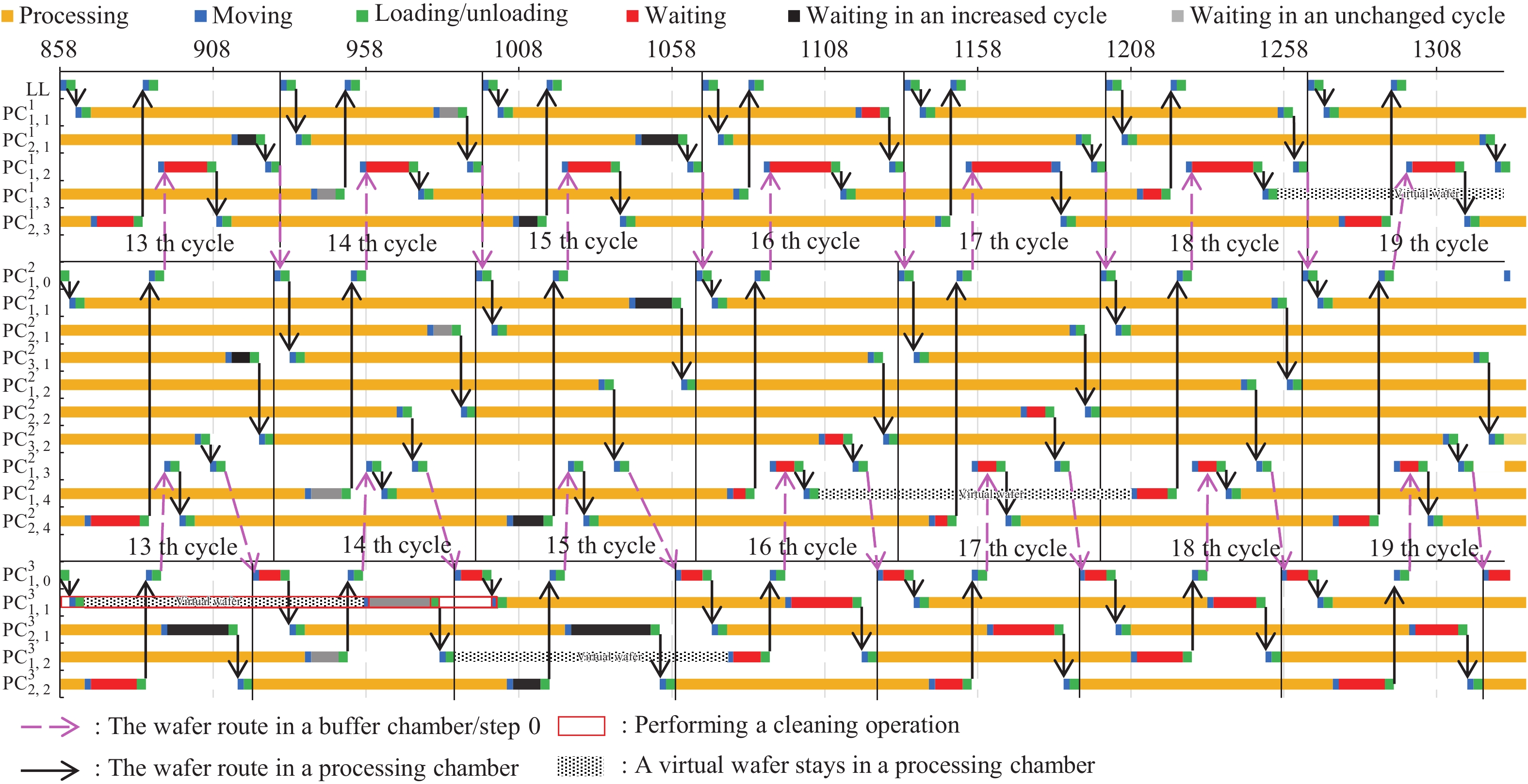
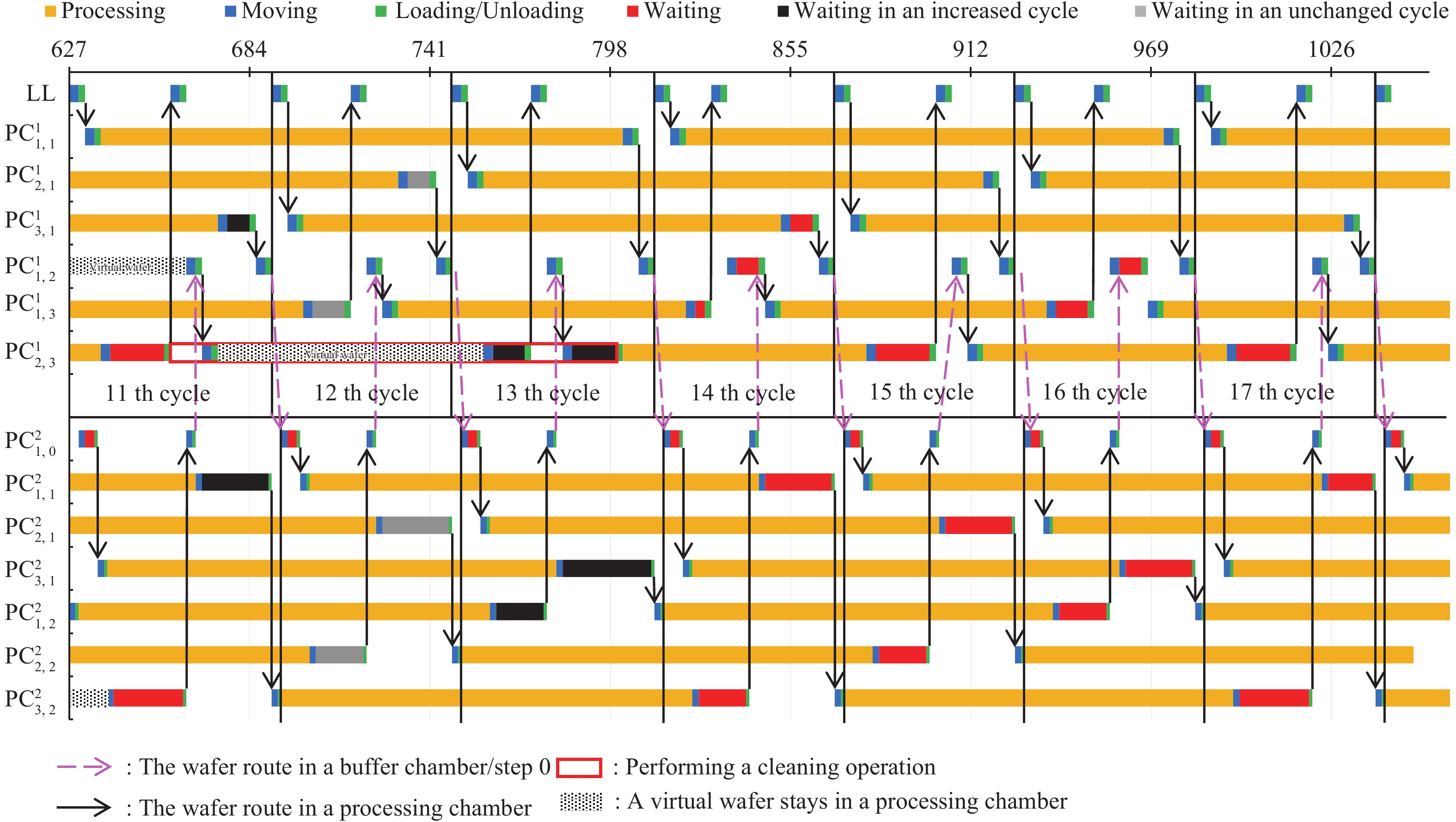
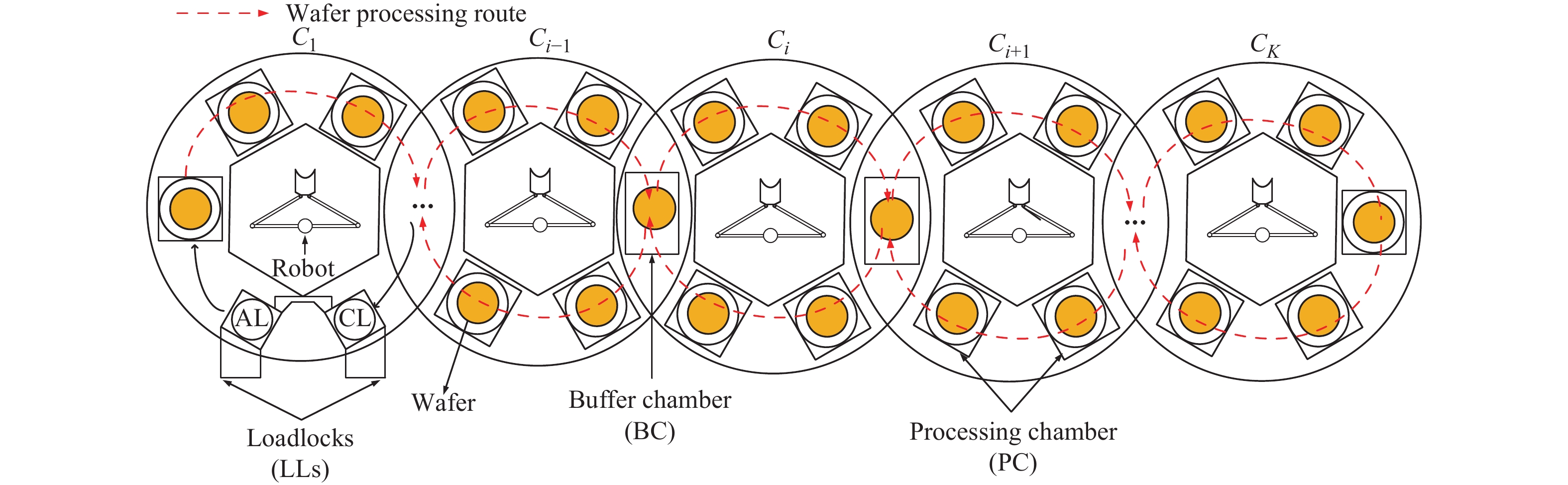
As wafer circuit widths shrink less than 10 nm, stringent quality control is imposed on the wafer fabrication processes. Therefore, wafer residency time constraints and chamber cleaning operations are widely required in chemical vapor deposition, coating processes, etc. They increase scheduling complexity in cluster tools. In this paper, we focus on scheduling single-arm multi-cluster tools with chamber cleaning operations subject to wafer residency time constraints. When a chamber is being cleaned, it can be viewed as processing a virtual wafer. In this way, chamber cleaning operations can be performed while wafer residency time constraints for real wafers are not violated. Based on such a method, we present the necessary and sufficient conditions to analytically check whether a single-arm multi-cluster tool can be scheduled with a chamber cleaning operation and wafer residency time constraints. An algorithm is proposed to adjust the cycle time for a cleaning operation that lasts a long cleaning time. Meanwhile, algorithms for a feasible schedule are also derived. And an algorithm is presented for operating a multi-cluster tool back to a steady state after the cleaning. Illustrative examples are given to show the application and effectiveness of the proposed method.

| [1] |
M. Dawande, C. Sriskandarajah, and S. Sethi, “On throughput maximization in constant travel-time robotic cells,” Manufact. Serv. Oper. Manage., vol. 4, no. 4, pp. 296–312, Oct. 2002. doi: 10.1287/msom.4.4.296.5731
|
| [2] |
M. J. López and S. C. Wood, “Systems of multiple cluster tools: Configuration, reliability, and performance,” IEEE Trans. Semicond. Manuf., vol. 16, no. 2, pp. 170–178, May 2003. doi: 10.1109/TSM.2003.810936
|
| [3] |
T.-E. Lee, H.-Y. Lee, and Y.-H. Shin, “Workload balancing and scheduling of a single-armed cluster tool,” in Proc. 5th APIEMS Conf., 2004, pp. 1–15.
|
| [4] |
T.-E. Lee, “A review of scheduling theory and methods for semiconductor manufacturing cluster tools,” in Proc. Winter Simulation Conf., 2008, pp. 2127–2135.
|
| [5] |
H. N. Geismar, M. Pinedo, and C. Sriskandarajah, “Robotic cells with parallel machines and multiple dual gripper robots: A comparative overview,” IIE Trans., vol. 40, no. 12, pp. 1211–1227, Oct. 2008. doi: 10.1080/07408170801965108
|
| [6] |
H.-J. Kim and J.-H. Lee, “Closed-form expressions on lot completion time for dual-armed cluster tools with parallel processing modules,” IEEE Trans. Autom. Sci. Eng., vol. 16, no. 2, pp. 898–907, Apr. 2019. doi: 10.1109/TASE.2018.2874664
|
| [7] |
S. Rostami, B. Hamidzadeh, and D. Camporese, “An optimal periodic scheduler for dual-arm robots in cluster tools with residency constraints,” IEEE Trans. Robot. Autom., vol. 17, no. 5, pp. 609–618, Oct. 2001. doi: 10.1109/70.964662
|
| [8] |
Y.-H. Shin, T.-E. Lee, J.-H. Kim, and H.-Y. Lee, “Modeling and implementing a real-time scheduler for dual-armed cluster tools,” Comput. Ind., vol. 45, no. 1, pp. 13–27, May 2001. doi: 10.1016/S0166-3615(01)00078-1
|
| [9] |
D.-K. Kim, H.-J. Kim, and T.-E. Lee, “Optimal scheduling for sequentially connected cluster tools with dual-armed robots and a single input and output module,” Int. J. Prod. Res., vol. 55, no. 11, pp. 3092–3109, Jun. 2017. doi: 10.1080/00207543.2016.1243819
|
| [10] |
W. Kim, T. S. Yu, and T. E. Lee, “Integrated scheduling of a dual-armed cluster tool for maximizing steady schedule patterns,” IEEE Trans. Syst. Man Cybern.: Syst., vol. 51, no. 12, pp. 7282–7294, Dec. 2021. doi: 10.1109/TSMC.2020.2978486
|
| [11] |
J. P. Wang, H. S. Hu, C. R. Pan, Y. Zhou, and L. Li, “Scheduling dual-arm cluster tools with multiple wafer types and residency time constraints,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 3, pp. 776–789, May 2020. doi: 10.1109/JAS.2020.1003150
|
| [12] |
B. Huang and M. Zhou, “Symbolic scheduling of robotic cellular manufacturing systems with timed Petri Nets,” IEEE Trans. Control Syst. Technol., vol. 30, no. 5, pp. 1876–1887, Sept. 2022.
|
| [13] |
J. Luo, Z. Liu, M. Zhou, and K. Xing, “Deadlock-free scheduling of flexible assembly systems based on Petri Nets and local search,” IEEE Trans. Syst. Man Cybern.:Syst., vol. 50, no. 10, pp. 3658–3669, Oct. 2020. doi: 10.1109/TSMC.2018.2855685
|
| [14] |
J. Luo, M. Zhou, and J. Q. Wang, “AB&B: An anytime branch and bound algorithm for scheduling of deadlock-prone flexible manufacturing systems,” IEEE Trans. Autom. Sci. Eng., vol. 18, no. 4, pp. 2011–2021, Oct. 2021. doi: 10.1109/TASE.2020.3029737
|
| [15] |
S. Wang, X. Guo, O. Karoui, M. Zhou, D. You, and A. Abusorrah, “A refined siphon-based deadlock prevention policy for a class of Petri Nets,” IEEE Trans. Syst. Man Cybern.: Syst., vol. 53, no. 1, pp. 191–203, Jan. 2023.
|
| [16] |
J.-H. Lee and H.-J. Kim, “Backward sequence analysis for single-armed cluster tools,” ICAPS, vol. 29, no. 1, pp. 269–272, May 2021.
|
| [17] |
Q. H. Zhu, Y. Qiao, N. Q. Wu, and Y. Hou, “Post-processing time-aware optimal scheduling of single robotic cluster tools,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 2, pp. 597–605, Mar. 2020. doi: 10.1109/JAS.2020.1003069
|
| [18] |
N. Q. Wu, C. B. Chu, F. Chu, and M. C. Zhou, “A Petri Net method for schedulability and scheduling problems in single-arm cluster tools with wafer residency time constraints,” IEEE Trans. Semicond. Manuf., vol. 21, no. 2, pp. 224–237, May 2008. doi: 10.1109/TSM.2008.2000425
|
| [19] |
C. R. Pan, Y. Qiao, N. Q. Wu, and M. C. Zhou, “A novel algorithm for wafer sojourn time analysis of single-arm cluster tools with wafer residency time constraints and activity time variation,” IEEE Trans. Syst. Man Cybern.: Syst., vol. 45, no. 5, pp. 805–818, May 2015. doi: 10.1109/TSMC.2014.2368995
|
| [20] |
F. J. Yang, N. Q. Wu, Y. Qiao, M. C. Zhou, and Z. W. Li, “Scheduling of single-arm cluster tools for an atomic layer deposition process with residency time constraints,” IEEE Trans. Syst. Man Cybern.: Syst., vol. 47, no. 3, pp. 502–516, Mar. 2017. doi: 10.1109/TSMC.2015.2507140
|
| [21] |
F. Yang, K. Gao, I. W. Simon, Y. Zhu, and R. Su, “Decomposition methods for manufacturing system scheduling: A survey,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 2, pp. 389–400, Mar. 2018. doi: 10.1109/JAS.2017.7510805
|
| [22] |
F. J. Yang, X. Tang, N. Q. Wu, C. J. Zhang, and L. Gao, “Wafer residency time analysis for time-constrained single-robot-arm cluster tools with activity time variation,” IEEE Trans. Control Syst. Technol., vol. 28, no. 4, pp. 1177–1188, Jul. 2020. doi: 10.1109/TCST.2019.2902329
|
| [23] |
Q. H. Zhu, N. Q. Wu, Y. Qiao, and M. C. Zhou, “Petri Net-based optimal one-wafer scheduling of single-arm multi-cluster tools in semiconductor manufacturing,” IEEE Trans. Semicond. Manuf., vol. 26, no. 4, pp. 578–591, Feb. 2013. doi: 10.1109/TSM.2013.2278378
|
| [24] |
F. Yang, N. Wu, Y. Qiao, M. Zhou, R. Su, and T. Qu, “Petri Net-based efficient determination of optimal schedules for transport-dominant single-arm multi-cluster tools,” IEEE Access, vol. 6, pp. 355–365, Nov. 2017.
|
| [25] |
X. Li and R. Y. K. Fung, “Optimal K-unit cycle scheduling of two-cluster tools with residency constraints and general robot moving times,” J. Scheduling, vol. 19, no. 2, pp. 165–176, Apr. 2016. doi: 10.1007/s10951-015-0448-7
|
| [26] |
L. P. Bai, N. Q. Wu, Z. W. Li, and M. C. Zhou, “Optimal one-wafer cyclic scheduling and buffer space configuration for single-arm multicluster tools with linear topology,” IEEE Trans. Syst. Man Cybern.: Syst., vol. 46, no. 10, pp. 1456–1467, Oct. 2016. doi: 10.1109/TSMC.2015.2501232
|
| [27] |
H.-J. Kim, J.-H. Lee, C. Kim, S. H. Baik, and T.-E. Lee, “Scheduling in-line mulitple cluster tools: A decomposition approach,” in Proc. Int. Conf. Mech. and Autom., 2012, pp. 1544–1549.
|
| [28] |
F. J. Yang, N. Q. Wu, Y. Qiao, and R. Su, “Polynomial approach to optimal one-wafer cyclic scheduling of treelike hybrid multi-cluster tools via Petri Nets,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 1, pp. 270–280, Jan. 2018. doi: 10.1109/JAS.2017.7510772
|
| [29] |
Q. H. Zhu, G. H. Wang, Y. Hou, N. Q. Wu, and Y. Qiao, “Optimally scheduling dual-arm multi-cluster tools to process two wafer types,” IEEE Rob. Autom. Lett., vol. 7, no. 3, pp. 5920–5927, Jul. 2022. doi: 10.1109/LRA.2022.3157031
|
| [30] |
H.-Y. Jin and J. R. Morrison, “Transient scheduling of single armed cluster tools: Algorithms for wafer residency constraints,” in Proc. IEEE Int. Conf. Autom. Sci. Eng., 2013, pp. 856–861.
|
| [31] |
Q. H. Zhu, Y. Qiao, and N. Q. Wu, “Optimal integrated schedule of entire process of dual-blade multi-cluster tools from start-up to close-down,” IEEE/CAA J. Autom. Sinica, vol. 6, no. 2, pp. 553–565, Mar. 2019. doi: 10.1109/JAS.2019.1911411
|
| [32] |
Q. H. Zhu, M. C. Zhou, Y. Qiao, and N. Q. Wu, “Petri Net modeling and scheduling of a close-down process for time-constrained single-arm cluster tools,” IEEE Trans. Syst. Man Cybern.: Syst., vol. 48, no. 3, pp. 389–400, Mar. 2018. doi: 10.1109/TSMC.2016.2598303
|
| [33] |
T.-K. Kim, C. Junga, and T.-E. Lee, “Scheduling start-up and close-down periods of dual-armed cluster tools with wafer delay regulation,” Int. J. Prod. Res., vol. 50, no. 10, pp. 2785–2795, May 2012. doi: 10.1080/00207543.2011.590949
|
| [34] |
D.-K. Kim, T.-E. Lee, and H.-J. Kim, “Optimal scheduling of transient cycles for single-armed cluster tools with parallel chambers,” IEEE Trans. Autom. Sci. Eng., vol. 13, no. 2, pp. 1165–1175, Apr. 2016. doi: 10.1109/TASE.2015.2443107
|
| [35] |
Y. Ahn and J. R. Morrison, “Analysis of circular cluster tools: Transient behavior and semiconductor equipment models,” in Proc. IEEE Int. Conf. Autom. Sci. Eng., 2010, pp. 39–44.
|
| [36] |
F. F. Wang, F. Ju, and N. X. Kang, “Transient analysis and real-time control of geometric serial lines with residence time constraints,” IISE Trans., vol. 51, no. 7, pp. 709–728, Jul. 2019. doi: 10.1080/24725854.2018.1511937
|
| [37] |
D.-K. Kim, T.-E. Lee, and H.-J. Kim, “Optimal scheduling of transient cycles for single-armed cluster tools,” in Proc. IEEE Int. Conf. Autom. Sci. Eng., 2013, pp. 874–879.
|
| [38] |
T.-S. Yu, H.-J. Kim, and T.-E. Lee, “Scheduling single-armed cluster tools with chamber cleaning operations,” IEEE Trans. Autom. Sci. Eng., vol. 15, no. 2, pp. 705–716, Apr. 2018. doi: 10.1109/TASE.2017.2682271
|
| [39] |
T.-S. Yu and T.-E. Lee, “Scheduling dual-armed cluster tools with chamber cleaning operations,” IEEE Trans. Autom. Sci. Eng., vol. 16, no. 1, pp. 218–228, Jan. 2019. doi: 10.1109/TASE.2017.2764105
|
| [40] |
F. J. Yang, K. Z. Gao, C. J. Zhang, Y. T. Zhu, R. Su, and Y. Qiao, “Efficient approach to cyclic scheduling of single-arm cluster tools with chamber cleaning operations and wafer residency time constraint,” IEEE Trans. Semicond. Manuf., vol. 31, no. 2, pp. 196–205, May 2018. doi: 10.1109/TSM.2018.2811125
|
| [41] |
M. Lee, J. R. Morrison, and A. A. Kalir, “Practical queueing models for preventive maintenance plan optimization: Multiple maintenance types and numerical studies,” IEEE Trans. Semicond. Manuf., vol. 34, no. 1, pp. 104–114, Dec. 2021. doi: 10.1109/TSM.2020.3041789
|
| [42] |
S.-M. Noh, J.-H. Kim, and S.-Y. Jang, “A schdule of cleaning process for a single-armed cluster tool,” Int. J. Industrial Engineering, vol. 24, no. 2, pp. 232–244, Jun. 2017.
|
| [43] |
C. Hong and T.-E. Lee, “Multi-agent reinforcement learning approach for scheduling cluster tools with condition based chamber cleaning operations,” in Proc. IEEE Int. Conf. Mach. Learn. Appl., 2018, pp. 885–890.
|
| [44] |
C. Li, F. Yang, and L. Zhen, “Efficient scheduling approaches to time-constrained single-armed cluster tools with condition-based chamber cleaning operations,” Int. J. Prod. Res., vol. 60, no. 11, pp. 3555–3568, Jun. 2022. doi: 10.1080/00207543.2021.1926568
|
| [45] |
J. Li, Y. Qiao, S. Zhang, Z. Li, N. Wu, and T. Song, “Scheduling of single-arm cluster tools with residency time constraints and chamber cleaning operations,” Appl. Sciences, vol. 11, no. 19, pp. 9193–9211, Oct. 2021. doi: 10.3390/app11199193
|
Figures(8) / Tables(1)






 DownLoad:
DownLoad: