A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 10
Volume 10
Issue 10
IEEE/CAA Journal of Automatica Sinica
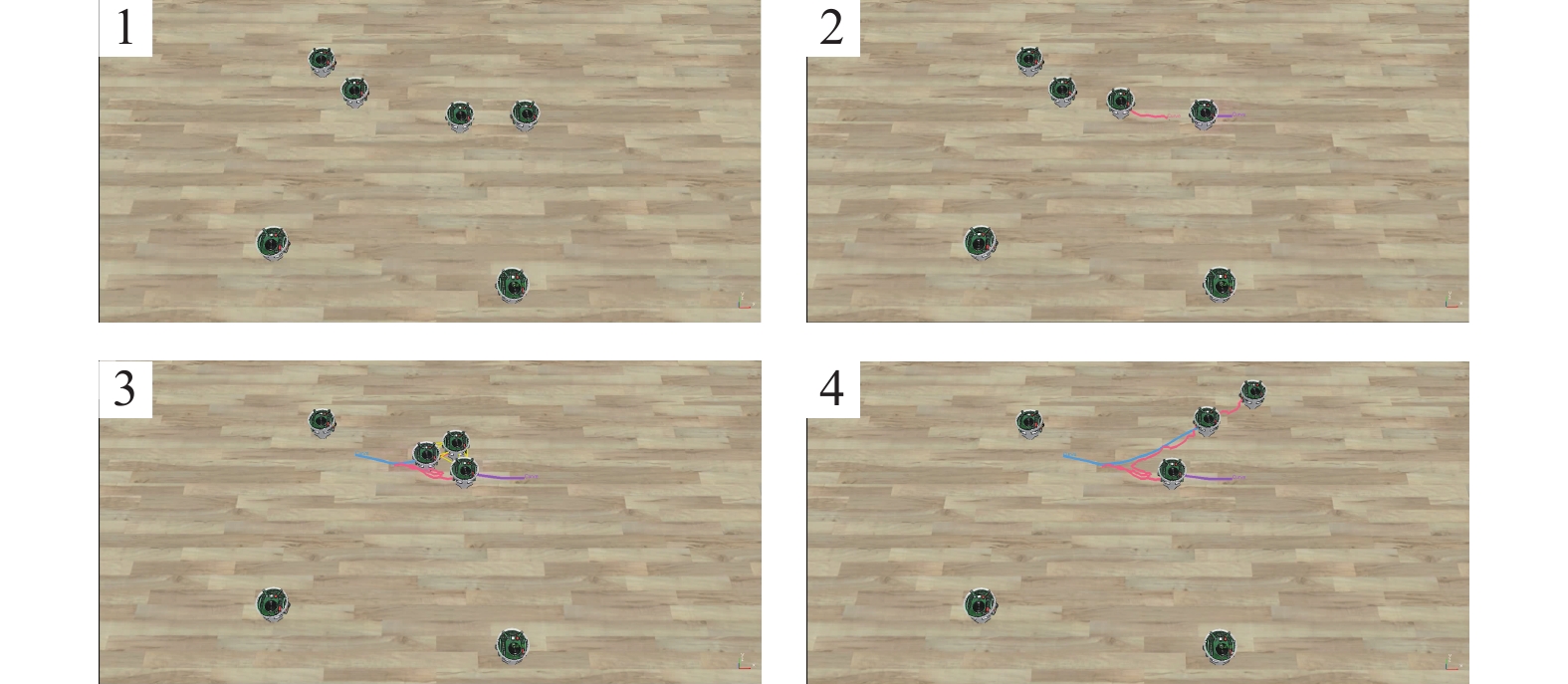
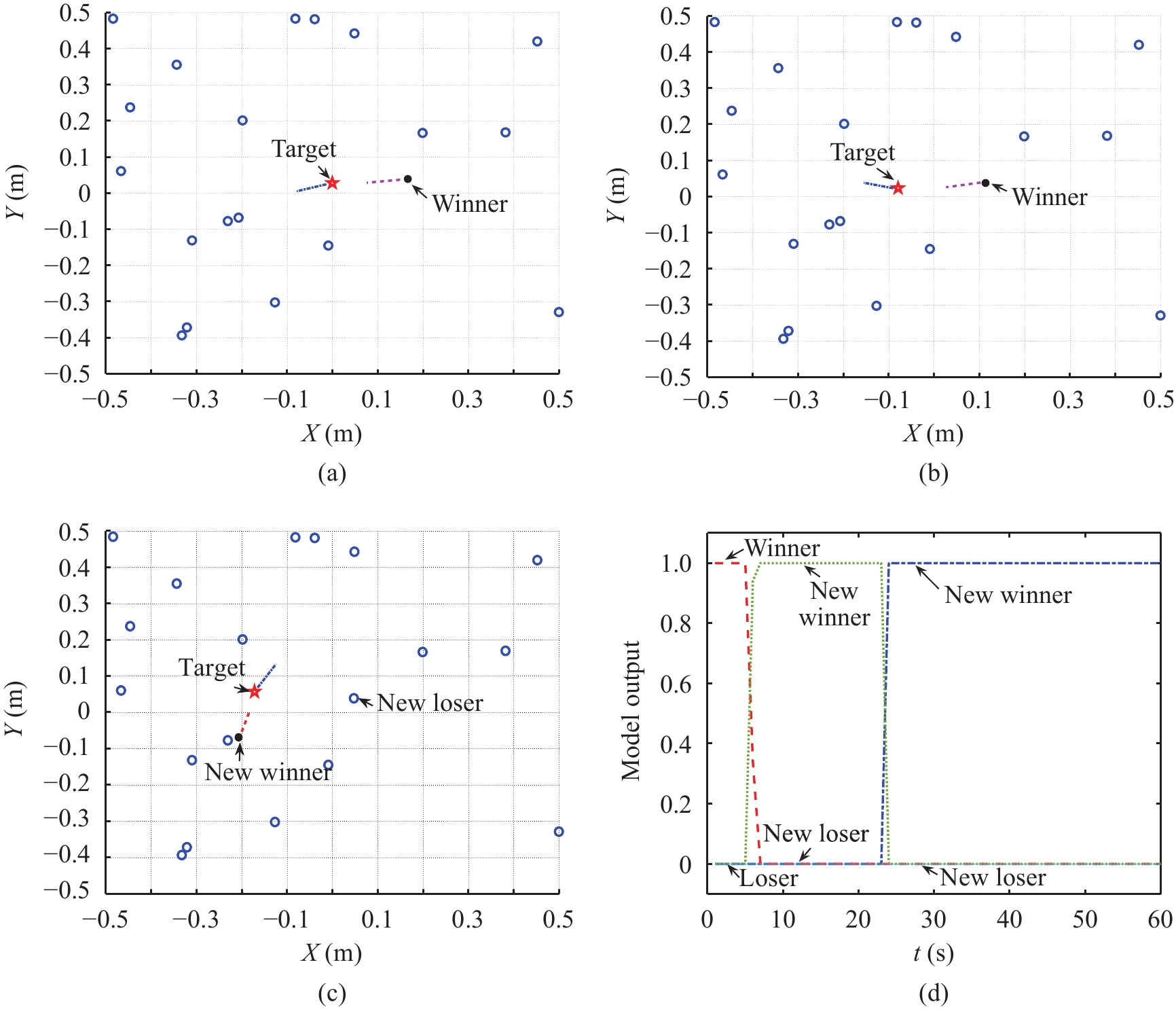
| Citation: | B. Peng, X. R. Zhang, and M. S. Shang, “A novel competition-based coordination model with dynamic feedback for multi-robot systems,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 10, pp. 2029–2031, Oct. 2023. doi: 10.1109/JAS.2023.123267

|

| [1] |
L. Ma, Y.-L. Wang, and Q.-L. Han, “Cooperative target tracking of multiple autonomous surface vehicles under switching interaction topologies,” IEEE/CAA J. Autom. Sinica., vol. 10, no. 3, pp. 673–684, 2023. doi: 10.1109/JAS.2022.105509
|
| [2] |
X. Ge, Q.-L. Han, J. Wang, and X. M. Zhang, “A scalable adaptive approach to multi-vehicle formation control with obstacle avoidance,” IEEE/CAA J. Autom. Sinica., vol. 9, no. 6, pp. 990–1004, 2022. doi: 10.1109/JAS.2021.1004263
|
| [3] |
J. Wang, Y. Hong, J. Wang, J. Xu, Y. Tang, and Q.-L. Han, “Cooperative and competitive multi-agent systems: From optimization to games,” IEEE/CAA J. Autom. Sinica., vol. 9, pp. 763–783, 2022. doi: 10.1109/JAS.2022.105506
|
| [4] |
G. Q. Gao, M. Yi, Y. H. Jia, W. N. Browne, and B. Xin, “Adaptive coordination ant colony optimization for multipoint dynamic aggregation,” IEEE Trans. Cybern., vol. 52, no. 8, pp. 7362–7376, 2021.
|
| [5] |
D. F. Wu, G. P. Zeng, L. G. Meng, W. J. Zhou, and L. M. Li, “Gini coefficient-based task allocation for multi-robot systems with limited energy resources,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 1, pp. 155–168, 2017.
|
| [6] |
J. H. Wu, C. X. Song, J. Ma, J. S. Wu, and G. J. Han, “Reinforcement learning and particle swarm optimization supporting real-time rescue assignments for multiple autonomous underwater vehicles,” IEEE Trans. Intell. Transp. Syst., vol. 23, no. 7, pp. 6807–6820, 2021.
|
| [7] |
L. Jin, S. Q. Liang, X. Luo, and M. C. Zhou, “Distributed and time-delayed k-winner-take-all network for competitive coordination of multiple robots,” IEEE Trans. Cybern., vol. 53, no. 1, pp. 641–652, 2022. doi: 10.1109/TCYB.2022.3159367
|
| [8] |
M. Liu and M. S. Shang, “On RNN-based k-WTA models with time-dependent inputs,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 11, pp. 2034–2036, 2022. doi: 10.1109/JAS.2022.105932
|
| [9] |
R. Lippmann, “An introduction to computing with neural nets,” IEEE Trans. ASSP Mag., vol. 4, no. 2, pp. 4–22, Apr. 1987. doi: 10.1109/MASSP.1987.1165576
|
| [10] |
G. Dempsey and E. McVey, “Circuit implementation of a peak detector neural network,” IEEE Trans. Circuit Syst. II,Analog Digit. Signal Process, vol. 40, no. 9, pp. 585–591, 1993. doi: 10.1109/82.257342
|
| [11] |
Z. Yu, S. Guo, F. Deng, Q. Yan, K. Huang, J. K. Liu, and F. Chen, “Emergent inference of hidden Markov models in spiking neural networks through winner-take-all,” IEEE Trans. Cybern., vol. 50, no. 3, pp. 1347–1354, Mar. 2020. doi: 10.1109/TCYB.2018.2871144
|
| [12] |
T. Asai, M. Ohtani, and H. Yonezu, “Analog integrated circuits for the Lotka-Volterra competitive neural networks,” IEEE Trans. Neural Netw., vol. 10, no. 5, pp. 1222–1231, 1999. doi: 10.1109/72.788661
|
| [13] |
Y. Fang, M. A. Cohen, and T. G. Kincaid, “Dynamic analysis of a general class of winner-take-all competitive neural networks,” IEEE Trans. Neural Netw., vol. 21, no. 5, pp. 771–783, 2010. doi: 10.1109/TNN.2010.2041671
|
| [14] |
S. Li and L. Jin, Competition-Based Neural Networks With Robotic Applications. Singapore: Springer, 2018.
|
| [15] |
Y. M. Qi, L. Jin, X. Luo, Y. Shi, and M. Liu, “Robust k-WTA network generation, analysis, and applications to multiagent coordination,” IEEE Trans. Cybernt., vol. 52, no. 8, pp. 8515–8527, Aug. 2022. doi: 10.1109/TCYB.2021.3079457
|
| [16] |
M. Liu, X. Y. Zhang, M. S. Shang, and L. Jin, “Gradient-based differential kWTA network with application to competitive coordination of multiple Robots,” IEEE/CAA J. Autom. Sinica., vol. 9, no. 8, pp. 1452–1463, 2022. doi: 10.1109/JAS.2022.105731
|
| [17] |
S. Liu and J. Wang, “A simplified dual neural network for quadratic programming with its KWTA application,” IEEE Trans. Neural Netw., vol. 17, no. 6, pp. 1500–1510, 2006. doi: 10.1109/TNN.2006.881046
|
Figures(2)






 DownLoad:
DownLoad: