A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 10
Issue 3
Volume 10
Issue 3
IEEE/CAA Journal of Automatica Sinica
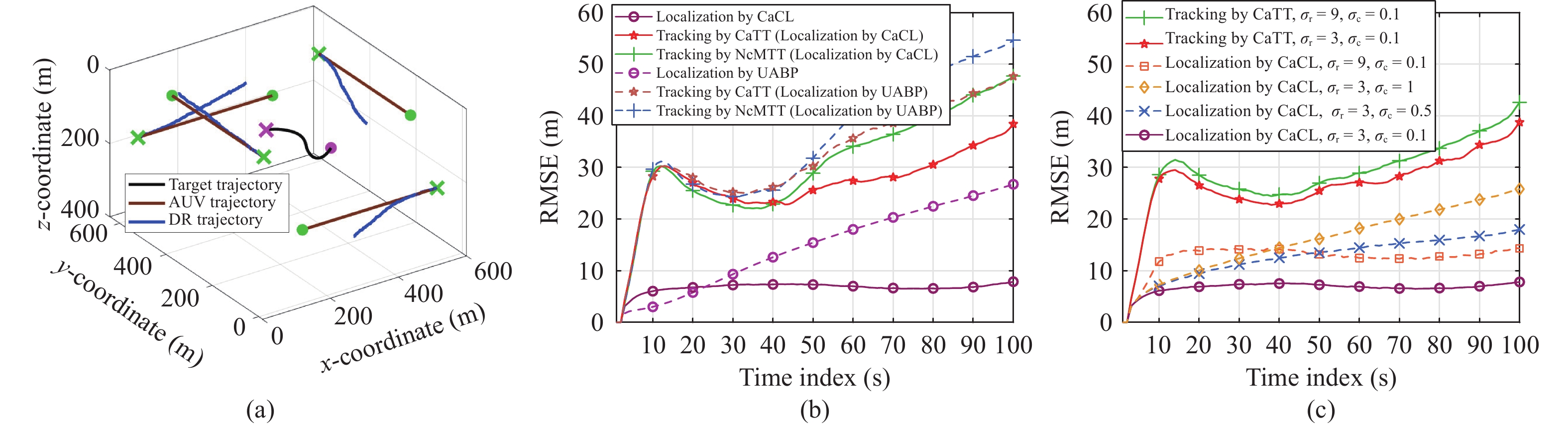
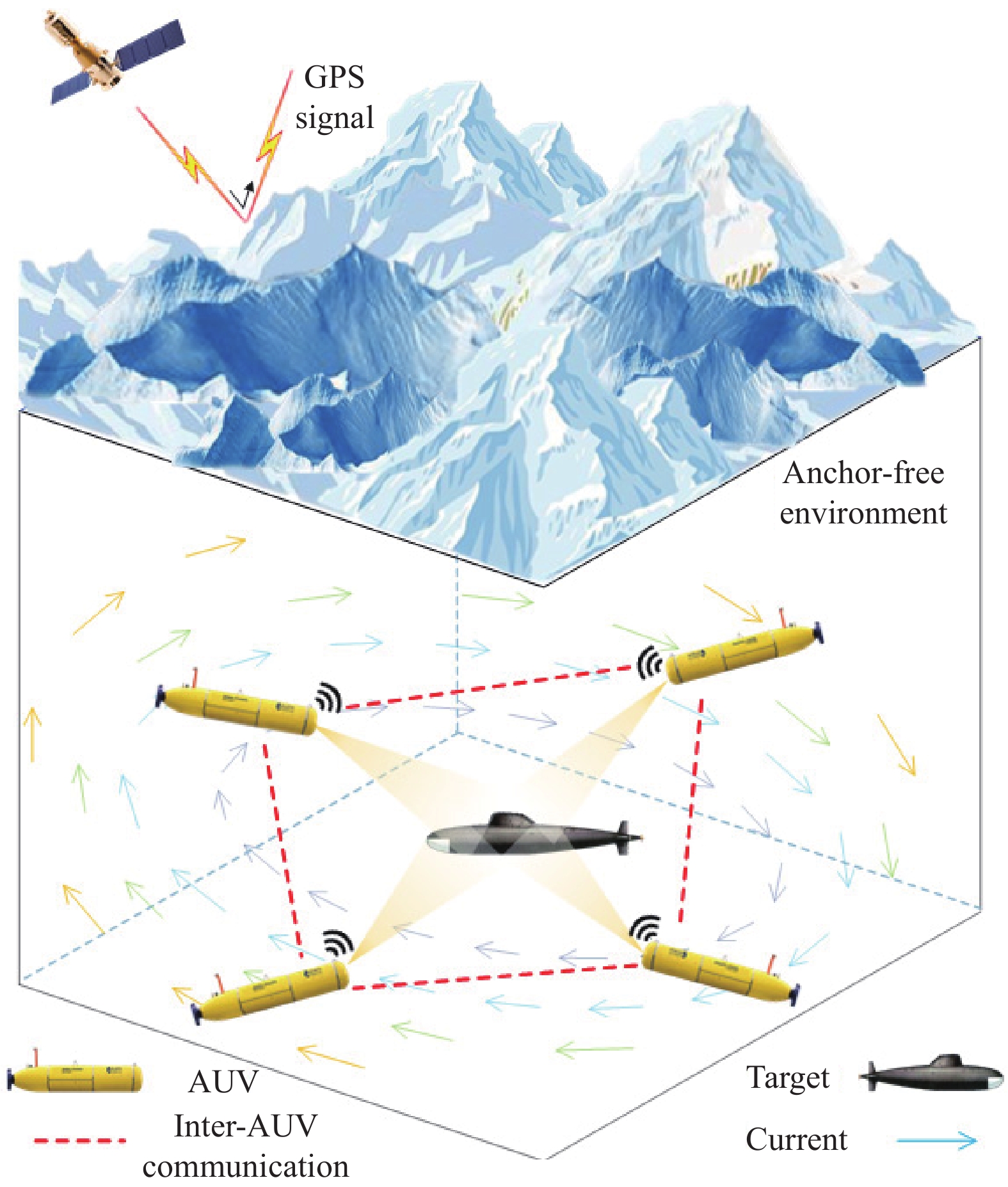
| Citation: | Y. C. Li, W. B. Yu, and X. P. Guan, “Current-aided multiple-AUV cooperative localization and target tracking in anchor-free environments,” IEEE/CAA J. Autom. Sinica, vol. 10, no. 3, pp. 792–806, Mar. 2023. doi: 10.1109/JAS.2022.105989

|

| [1] |
Z. Zhou, J. Liu, and J. Yu, “A survey of underwater multi-robot systems,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 1, pp. 1–18, Jan. 2022. doi: 10.1109/JAS.2021.1004269
|
| [2] |
H. Tan, R. Diamant, W. K. G. Seah, and M. Waldmeyer, “A survey of techniques and challenges in underwater localization,” Ocean Eng., vol. 38, no. 14, pp. 1663–1676, Oct. 2011.
|
| [3] |
J. Melo and A. Matos, “Survey on advances on terrain based navigation for autonomous underwater vehicles,” Ocean Eng., vol. 139, pp. 250–264, May 2017. doi: 10.1016/j.oceaneng.2017.04.047
|
| [4] |
Z. Song and K. Mohseni, “FACON: A flow-aided cooperative navigation scheme,” in Proc. IEEE/RSJ Int. Conf. Intell. Robot. Syst., Vancouver, Canada, Sept. 2017, pp. 6251–6256.
|
| [5] |
Y. Li, Y. Wang, and X. Guan, “Belief propagation based multi-AUV cooperative localization in anchor-free environments,” in Proc. IEEE UComms, Lerici, Italy, Aug. 2018, pp. 1–5.
|
| [6] |
L. Paull, S. Saeedi, M. Seto, and H. Li, “AUV navigation and localization: A review,” IEEE J. Ocean. Eng., vol. 39, no. 1, pp. 131–149, Jan. 2014. doi: 10.1109/JOE.2013.2278891
|
| [7] |
Y. Shen, H. Wymeersch, and M. Z. Win, “Fundamental limits of wideband localization—part Ⅱ: Cooperative networks,” IEEE Trans. Inf. Theory, vol. 56, no. 10, pp. 4981–5000, Oct. 2010. doi: 10.1109/TIT.2010.2059720
|
| [8] |
J. Lu, X. Chen, M. Luo, and Y. Zhou, “Cooperative localization for multiple AUVs based on the rough estimation of the measurements,” Appl. Soft Comput., vol. 91, p. 106197, Jun. 2020. doi: 10.1016/j.asoc.2020.106197
|
| [9] |
X. Cao, H. Sun, and G. E. Jan, “Multi-AUV cooperative target search and tracking in unknown underwater environment,” Ocean Eng., vol. 150, pp. 1–11, Feb. 2018. doi: 10.1016/j.oceaneng.2017.12.037
|
| [10] |
S. Wang, L. Chen, D. Gu, and H. Hu, “Cooperative localization of AUVs using moving horizon estimation,” IEEE/CAA J. Autom. Sinica, vol. 1, no. 1, pp. 68–76, Jan. 2014. doi: 10.1109/JAS.2014.7004622
|
| [11] |
H. Zhao, J. Yan, X. Luo, and X. Guan, “Privacy preserving solution for the asynchronous localization of underwater sensor networks,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 6, pp. 1511–1527, Nov. 2020. doi: 10.1109/JAS.2020.1003312
|
| [12] |
J. Pearl, Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference. San Mateo, USA: Morgan Kaufmann, 1988.
|
| [13] |
Á. F. García-Fernández, L. Svensson, and S. Särkkä, “Cooperative localization using posterior linearization belief propagation,” IEEE Trans. Veh. Technol., vol. 67, no. 1, pp. 832–836, Jan. 2018. doi: 10.1109/TVT.2017.2734683
|
| [14] |
F. Meyer, O. Hlinka, and F. Hlawatsch, “Sigma point belief propagation,” IEEE Signal Process. Lett., vol. 21, no. 2, pp. 145–149, Feb. 2014. doi: 10.1109/LSP.2013.2290192
|
| [15] |
J. Lien, U. J. Ferner, W. Srichavengsup, H. Wymeersch, and M. Z. Win, “A comparison of parametric and sample-based message representation in cooperative localization,” Int. J. Navig. Observ., vol. 2012, pp. 1–10, Jul. 2012.
|
| [16] |
D. Jin, F. Yin, C. Fritsche, F. Gustafsson, and A. M. Zoubir, “Bayesian cooperative localization using received signal strength with unknown path loss exponent: Message passing approaches,” IEEE Trans. Signal Process., vol. 68, pp. 1120–1135, Jan. 2020. doi: 10.1109/TSP.2020.2969048
|
| [17] |
F. Meyer, O. Hlinka, H. Wymeersch, E. Riegler, and F. Hlawatsch, “Distributed localization and tracking of mobile networks including noncooperative objects,” IEEE Trans. Signal Inf. Process. Netw., vol. 2, no. 1, pp. 57–71, Mar. 2016.
|
| [18] |
F. Meyer, T. Kropfreiter, J. L. Williams, R. Lau, F. Hlawatsch, Braca, and M. Z. Win, “Message passing algorithms for scalable multitarget tracking,” Proc. IEEE, vol. 106, no. 2, pp. 221–259, Feb. 2018. doi: 10.1109/JPROC.2018.2789427
|
| [19] |
S. Song, J. Liu, J. Guo, J. Wang, Y. Xie, and J.-H. Cui, “Neural-network-based AUV navigation for fast-changing environments,” IEEE Internet Things J., vol. 7, no. 10, pp. 9773–9783, Oct. 2020. doi: 10.1109/JIOT.2020.2988313
|
| [20] |
G. Salavasidis, A. Munafò, C. A. Harris, T. Prampart, R. Templeton, M. Smart, D. T. Roper, M. Pebody, S. D. McPhail, E. Rogers, and A. B. Phillips, “Terrain-aided navigation for long-endurance and deep-rated autonomous underwater vehicles,” J. Field Robot., vol. 36, no. 2, pp. 447–474, Nov. 2018.
|
| [21] |
Y. Li, Y. Wang, W. Yu, and X. Guan, “Multiple autonomous underwater vehicle cooperative localization in anchor-free environments,” IEEE J. Ocean. Eng., vol. 44, no. 4, pp. 895–911, Oct. 2019. doi: 10.1109/JOE.2019.2935516
|
| [22] |
Y. Li, L. Liu, W. Yu, Y. Wang, and X. Guan, “Noncooperative mobile target tracking using multiple AUVs in anchor-free environments,” IEEE Internet Things J., vol. 7, no. 10, pp. 9819–9833, Oct. 2020. doi: 10.1109/JIOT.2020.2988307
|
| [23] |
Y. Li, W. Yu, and L. Wang, “Analysis of belief propagation based cooperative localization and target tracking schemes,” in Proc. China Autom. Congr, Beijing, China, Oct. 2021, pp. 3348–3353.
|
| [24] |
M. Poostpasand and R. Javidan, “An adaptive target tracking method for 3D underwater wireless sensor networks,” Wireless Netw., vol. 24, no. 8, pp. 2797–2810, Nov. 2018. doi: 10.1007/s11276-017-1506-1
|
| [25] |
J. Yan, H. Zhao, B. Pu, X. Luo, C. Chen, and X. Guan, “Energy-efficient target tracking with UASNs: A consensus-based Bayesian approach,” IEEE Trans. Autom. Sci. Eng., vol. 17, no. 3, pp. 1361–1375, Jul. 2020.
|
| [26] |
E. Chassignet, H. E. Hurlburt, E. J. Metzger, O. M. Smedstad, J. A. Cummings, G. R. Halliwell, R. Bleck, R. Baraille, A. J. Wallcraft, C. Lozano, et al., “US GODAE: Global ocean prediction with the HYbrid coordinate ocean model (HYCOM),” Oceanography, vol. 22, no. 2, pp. 64–75, Jun. 2009. doi: 10.5670/oceanog.2009.39
|
| [27] |
S. Fan, B. Li, W. Xu, and Y. Xu, “Impact of current disturbances on AUV docking: Model-based motion prediction and countering approaches,” IEEE J. Ocean. Eng., vol. 43, no. 4, pp. 888–904, Oct. 2018. doi: 10.1109/JOE.2017.2769938
|
| [28] |
B. Liu, X. Tang, R. Tharmarasa, T. Kirubarajan, R. Jassemi, and S. Hallé, “Underwater target tracking in uncertain multipath ocean environments,” IEEE Trans. Aerosp. Electron. Syst., vol. 56, no. 6, pp. 4899–4915, Dec. 2020. doi: 10.1109/TAES.2020.3003703
|
| [29] |
Z. Zhu, S.-L. J. Hu, and H. Li, “Effect on Kalman based underwater tracking due to ocean current uncertainty,” in Proc. IEEE/OES Autonomous Underwater Veh., Tokyo, Japan, Nov. 2016, pp. 131–137.
|
| [30] |
T. Inanc, S. Shadden, and J. Marsden, “Optimal trajectory generation in ocean flows,” in Proc. Amer. Control Conf., Portland, USA, Jun. 2005, pp. 674–679.
|
| [31] |
Z. Song, D. Lipinski, and K. Mohseni, “Multi-vehicle cooperation and nearly fuel-optimal flock guidance in strong background flows,” Ocean Eng., vol. 141, pp. 388–404, Sept. 2017. doi: 10.1016/j.oceaneng.2017.06.024
|
| [32] |
Z. Song and K. Mohseni, “Long-term inertial navigation aided by dynamics of flow field features,” IEEE J. Ocean. Eng., vol. 43, no. 4, pp. 940–954, Oct. 2018. doi: 10.1109/JOE.2017.2766900
|
| [33] |
D. Chang, M. Johnson-Roberson, and J. Sun, “An active perception approach for mid-water localization of autonomous underwater vehicles,” in Proc. Amer. Control Conf., Denver, USA, Jul. 2020, pp. 671–676.
|
| [34] |
O. J. Woodman, “An introduction to inertial navigation,” Computer Laboratory, University of Cambridge, Cambridge, UK, Tech. Rep. UCAMCL-TR-696, 2007.
|
| [35] |
W. Flenniken, J. Wall, and D. Bevly, “Characterization of various IMU error sources and the effect on navigation performance,” in Proc. Int. Tech. Meeting Satellite Division Inst. Navigation, Long Beach, USA, Sept. 2005, pp. 967–978.
|
| [36] |
A. Mehra and I. Rivin, “A real time ocean forecast system for the north atlantic ocean,” Terrestrial Atmos. Ocean. Sci., vol. 21, no. 1, pp. 211–228, Feb. 2010. doi: 10.3319/TAO.2009.04.16.01(IWNOP)
|
| [37] |
V. Savic and S. Zazo, “Cooperative localization in mobile networks using nonparametric variants of belief propagation,” Ad Hoc Netw., vol. 11, no. 1, pp. 138–150, May 2013. doi: 10.1016/j.adhoc.2012.04.012
|
| [38] |
T. Maki, T. Matsuda, T. Sakamaki, T. Ura, and J. Kojima, “Navigation method for underwater vehicles based on mutual acoustical positioning with a single seafloor station,” IEEE J. Ocean. Eng., vol. 38, no. 1, pp. 167–177, Jan. 2013. doi: 10.1109/JOE.2012.2210799
|
| [39] |
H. Wymeersch, J. Lien, and M. Z. Win, “Cooperative localization in wireless networks,” in Proc. IEEE, vol. 97, no. 2, pp. 427–450, Feb. 2009.
|
| [40] |
A. T. Ihler, J. W. Fisher, R. L. Moses, and A. S. Willsky, “Nonparametric belief propagation for self-localization of sensor networks,” IEEE J. Sel. Areas Commun., vol. 23, no. 4, pp. 809–819, Apr. 2005. doi: 10.1109/JSAC.2005.843548
|
| [41] |
Z. Song and K. Mohseni, “Cooperative mid-depth navigation aided by ocean current prediction,” in Proc. OCEANS, Anchorage, USA, Sept. 2017, pp. 1–8.
|
| [42] |
A. Doucet, N. De Freitas, and N. Gordon, Sequential Monte Carlo Methods in Practice. New York, USA: Springer, 2001.
|
| [43] |
B. W. Silverman, Density Estimation for Statistics and Data Analysis. New York, USA: Chapman and Hall, 1986.
|
| [44] |
A. Bordone, T. Ciuffardi, G. Raiteri, A. Schirone, R. Bozzano, S. Pensieri, F. Pennecchi, and P. Picco, “Improved current estimates from spar buoy-mounted ADCP measurement station: A case study in the ligurian sea,” J. Marine Sci. Eng., vol. 9, no. 5, p. 466, Apr. 2021.
|
| [45] |
Y. Li, B. Li, W. Yu, S. Zhu, and X. Guan, “Cooperative localization based multi-AUV trajectory planning for target approaching in anchor-free environments,” IEEE Trans. Veh. Technol., vol. 71, no. 3, pp. 3092–3107, Mar. 2022. doi: 10.1109/TVT.2021.3137171
|
| [46] |
S. Zhou and Z. Wang, OFDM for Underwater Acoustic Communications. New York, USA: Wiley, 2014.
|
| [47] |
M. G. Gross, Oceanography: A View of the Earth. 3rd Ed. New York, USA: Prentice-Hall, Englewood Cliffs, 1982.
|
| [48] |
H. Lamb, Hydrodynamics. Cambridge, UK: Cambridge University Press, 1993.
|
| [49] |
S. Farahmand, S. I. Roumeliotis, and G. B. Giannakis, “Set-membership constrained particle filter: Distributed adaptation for sensor networks,” IEEE Trans. Signal Process., vol. 59, no. 9, pp. 4122–4138, Sept. 2011. doi: 10.1109/TSP.2011.2159599
|
Figures(10) / Tables(3)






 DownLoad:
DownLoad: