A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 8
Issue 5
Volume 8
Issue 5
IEEE/CAA Journal of Automatica Sinica
| Citation: | S. Y. Wang, J. Housden, T. X. Bai, H. B. Liu, J. Back, D. Singh, K. Rhode, Z.-G. Hou, and F.-Y. Wang, "Robotic Intra-Operative Ultrasound: Virtual Environments and Parallel Systems," IEEE/CAA J. Autom. Sinica, vol. 8, no. 5, pp. 1095-1106, May. 2021. doi: 10.1109/JAS.2021.1003985

|

| [1] |
N. Magnavita, L. Bevilacqua, P. Mirk, A. Fileni, and N. Castellino, “Work-related musculoskeletal complaints in sonologists,” J. Occup. Environ. Med., vol. 41, no. 11, pp. 981–988, 1999. doi: 10.1097/00043764-199911000-00010
|
| [2] |
L. LaGrone, V. Sadasivam, A. Kushner, and R. Groen, “A review of training opportunities for ultrasonography in low and middle income countries,” Tropical Med. Int. Health, vol. 17, no. 7, pp. 808–819, 2012. doi: 10.1111/j.1365-3156.2012.03014.x
|
| [3] |
C. Kim, F. Schäfer, D. Chang, D. Petrisor, M. Han, and D. Stoianovici, “Robot for ultrasound-guided prostate imaging and intervention,” in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst., 2011, pp. 943–948.
|
| [4] |
M. Han, C. Kim, P. Mozer, F. Schäfer, S. Badaan, B. S, Vigaru, et al., “Tandem-robot Assisted Laparoscopic Radical Prostatectomy to Improve the Neurovascular Bundle Visualization: A Feasibility Study,” Urology, vol. 77, no. 2, pp. 502–506, 2011.
|
| [5] |
T. Adebar, S. Salcudean, S. Mahdavi, M. Moradi, C. Nguan, and L. Goldenberg, “A robotic system for intra-operative trans-rectal ultrasound and ultrasound elastography in radical prostatectomy,” in Proc. Int. Conf. Inf. Process. Comput.-Assisted Interventions, 2011, pp. 79–89.
|
| [6] |
T. Adebar, O. Mohareri, and S. Salcudean, “Instrument-based calibration and remote control of intraoperative ultrasound for robot-assisted surgery,” in Proc. Int. Conf. Biomed. Robot. Biomechatronics, 2012, pp. 38–43.
|
| [7] |
C. M. Schneider, A. M. Okamura, and G. Fichtinger, “A robotic system for transrectal needle insertion into the prostate with integrated ultrasound,” in Proc. Int. Conf. Robot. Autom., 2004, pp. 365–370.
|
| [8] |
T.Podder, I. Buzurovic, K. Yan, Y. Hu, R. Valicenti, A. Dicker, et al., “Robotic system for image-guided prostate seed implant,” Brachytherapy, vol. 7, no. 2, pp. 100–101, 2008.
|
| [9] |
P. M. Loschak, L. J. Brattain, and R. D. Howe, “Automated pointing of cardiac imaging catheters,” in Proc. Int. Conf. Robot. Autom., 2013, pp. 5794–5799.
|
| [10] |
P. Loschak, A. Degirmenci, Y. Tenzer, C. Tschabrunn, E. Anter, and R. Howe, “A four degree of freedom robot for positioning ultrasound imaging catheters,” J. Mech. Robot, vol. 8, no. 5, 2016.
|
| [11] |
S. Wang, J. Housden, D. Singh, K. Althoefer, and K. Rhode, “Design, testing and modelling of a novel robotic system for trans‐oesophageal ultrasound,” Int. J. Medical Robot. Comput. Assist. Surg., vol. 12, no. 3, pp. 342–354, 2016. doi: 10.1002/rcs.1691
|
| [12] |
S. Wang, D. Singh, D. Johnson, K. Althoefer, K. Rhode, and R. J. Housden, “Robotic ultrasound: View planning, tracking, and automatic acquisition of transesophageal echocardiography,” IEEE Robot. Autom. Mag., vol. 23, no. 4, pp. 118–127, 2016. doi: 10.1109/MRA.2016.2580478
|
| [13] |
J. A. Goldstein, S. Balter, M. Cowley, J. Hodgson, and L. W. Klein, “Occupational hazards of interventional cardiologists: Prevalence of orthopedic health problems in contemporary practice,” Catheter. Cardiovasc. Intervent., vol. 63, pp. 407–411, 2004. doi: 10.1002/ccd.20201
|
| [14] |
F.-Y. Wang, “Shadow systems: A new concept for nested and embedded co-simulation for intelligent systems”, University of Arizona, Tucson, USA, 1994.
|
| [15] |
F.-Y. Wang, “On the modeling, analysis, control and management of complex systems,” Complex Syst. Complex. Sci., vol. 3, no. 2, pp. 26–34, 2006.
|
| [16] |
F.-Y. Wang, “Parallel system methods for management and control of complex systems,” Control and Decision, vol. 19, no. 5, pp. 485–489, 514, 2004.
|
| [17] |
F.-Y. Wang, N. N. Zheng, D. P. Cao, C. M. Martinez, L. Li, and T. Liu, “Parallel driving in CPSS: A unified approach for transport automation and vehicle intelligence,” IEEE/CAA J. Autom. Sinica, vol. 4, no. 4, pp. 577–587, 2017. doi: 10.1109/JAS.2017.7510598
|
| [18] |
K. F. Wang, C. Gou, N. N. Zheng, J. M. Rehg, and F.-Y. Wang, “Parallel vision for perception and understanding of complex scenes: Methods, framework, and perspectives,” Artif. Intell. Rev., vol. 48, no. 3, pp. 299–329, 2017. doi: 10.1007/s10462-017-9569-z
|
| [19] |
J. S. Shanewise, A. T. Cheung, S. Aronson, W. J. Stewart, R. L. Weiss, J. B. Mark, et al., “ASE/SCA guidelines for performing a comprehensive intraoperative multiplane transesophageal echocardiography examination: recommendations of the american society of echocardiography council for intraoperative echocardiography and the society of cardiovascular anesthesiologists task force for certification in perioperative transesophageal echocardiography,” Anesth. & Analg., vol. 89, pp. 870–84, 1999.
|
| [20] |
A. Lasso, T. Heffter, A. Rankin, C. Pinter, T. Ungi, and G. Fichtinger, “PLUS: Open-source toolkit for ultrasound-guided intervention systems,” IEEE. Trans. Biomed. Eng., vol. 61, no. 10, pp. 2527–2537, 2014. doi: 10.1109/TBME.2014.2322864
|
| [21] |
J. Peters, O. Ecabert, C. Meyer, H. Schramm, R. Kneser, A. Groth, and J.Weese, “Automatic whole heart segmentation in static magnetic resonanceimage volumes,” in Proc. Int. Conf. Med. Image Comput. Comput. Assist. Intervention, Lecture Notes Comput. Sci., 2007, pp. 402–410.
|
| [22] |
L. Bartha, A. Lasso, C. Pinter, T. Ungi, Z. Keri, and G. Fichtinger, “Open-source surface mesh-based ultrasound-guided spinal intervention simulator,” Int. J. Comput. Assist. Radiol. Surg., vol. 8, no. 6, pp. 1043–1051, 2013. doi: 10.1007/s11548-013-0901-z
|
| [23] |
J. Tokuda, G. S. Fischer, X. Papademetris, Z. Yaniv, L. Ibanez, P. Cheng, et al., “OpenIGTLink: an open network protocol for image-guided therapy environment,” Int. J. Medical Robot. Comput. Assist. Surg., vol. 5, no. 4, pp. 423–434, 2009.
|
| [24] |
S. Wang, “Development of a robotic trans-oesophageal ultrasound system and its application in automatic acquisition,” Ph.D. dissertation, School of Biomedical Engineering & Imaging Sciences, King’s College London., London, UK, 2017.
|
| [25] |
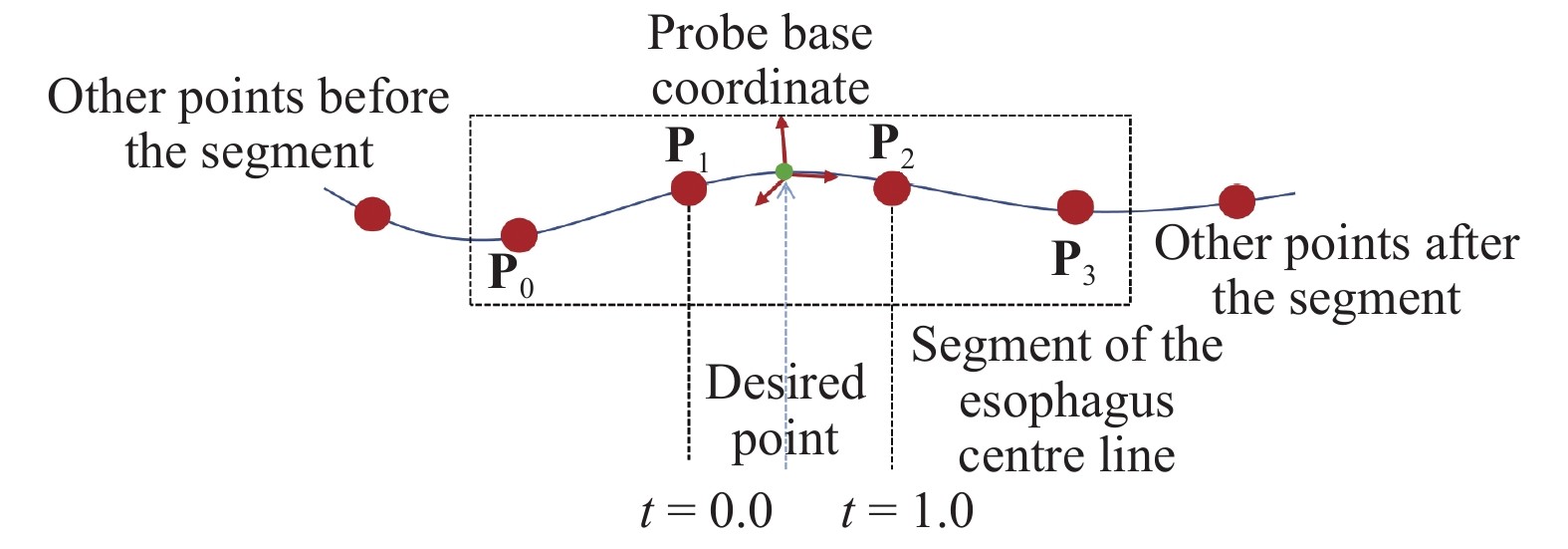
E. Catmull and R. Rom, “A class of local interpolating splines,” Comput. Aided Geom. Des., pp. 317–326, 1974.
|
| [26] |
V. Malik, M. Hote, and A. Jha, “Minimally invasive cardiac surgery and transesophageal echocardiography,” Ann. Card. Anaesth., vol. 17, no. 2, Article No. 125, 2014. doi: 10.4103/0971-9784.129844
|
| [27] |
M. Prabhu and A. George, “Transesophageal monitoring in anaesthesia: An update,” Curr. Anesthesiol. Rep., vol. 4, no. 3, pp. 261–273, 2014. doi: 10.1007/s40140-014-0071-8
|
| [28] |
K. Deb, “An efficient constraint handling method for genetic algorithms,” Comput. Methods Appl. Mech. Eng., vol. 186, no. 2-4, pp. 311–338, 2000. doi: 10.1016/S0045-7825(99)00389-8
|
| [29] |
K. Deep, K. Singh, M. Kansal, and C. Mohan, “A real coded genetic algorithm for solving integer and mixed integer optimization problems,” Appl. Math. Comput., vol. 212, no. 2, pp. 505–518, 2009.
|
| [30] |
S. Wang, J. Housden, A. Zar, R. Gandecha, D. Singh, and K. Rhode, “Strategy for monitoring cardiac interventions with an intelligent robotic ultrasound device,” Micromachines, vol. 9, no. 2, Article No. 65, 2018. doi: 10.3390/mi9020065
|
Figures(15)







 DownLoad:
DownLoad: