Output-feedback Dynamic Surface Control for a Class of Nonlinear Non-minimum Phase Systems
Ⅰ. Introduction
It is well known that nonlinear systems with asymptotically
unstable zero dynamics or internal dynamics are called non-minimum
phase[1,2]. This feature cannot be removed by feedback,and
restricts the straightforward application of the powerful
nonlinear control techniques such as feedback linearization,
sliding mode control and backstepping method[3,4],which work
well in minimum phase systems. Under this circumstance,the
control problem of nonlinear non-minimum phase systems is more
challenging and has been payed more attention by the control
community.
The existing research work concerning the nonlinear non-minimum
phase systems can be divided into two main branches: stabilization
control and tracking control. Firstly we give a brief description on
stabilization control for nonlinear non-minimum phase systems. Based
on backstepping control and inverse design with the combination of
neural network,[5] implemented the state-feedback adaptive
stabilization for a class of non-affine single-input single-output
(SISO) non-minimum phase systems. Reference [6] achieved
stabilization control for a class of nonlinear non-minimum phase
systems in general output-feedback form via standard backstepping
control and small-gain technique. In [7,8,9,10],different
stabilization methods for non-minimum phase systems can be found,
such as robust observer,neural network,and high-gain observer.
Though the backstepping method cannot be directly used in
non-minimum phase systems as described in [4],the aforementioned
work properly introduced the backstepping into the stabilization
control for those non-minimum phase systems under proper
assumptions,and attained control aims. The common feature of these
referred papers is that the outputs and the unstable internal
dynamics are all stabilized to zero. As we all know,stabilization
control is the basis of output tracking control,and output tracking
can transformed into stabilization control problem of tracking
errors[3],so the aforesaid stabilization control methods can
lead to the creation of output tracking control methods for
nonlinear non-minimum phase systems.
Whereas the work such as [3,11,12] focus on another ambitious
problem-trajectory tracking control of nonlinear non-minimum
phase systems. When we design tracking control laws for minimum
phase systems,the control aim is to let the system outputs to
follow the desired output signals,and the internal dynamics are
generally disregarded,because it will get stable when the external
dynamics attains stability. However,this case is not applicable to
non-minimum phase systems. For the tracking control of nonlinear
non-minimum phase systems,the controller is designed to meet the
following two demands: 1) The output tracking errors asymptotically
converge to zero; 2) The unstable internal dynamics is rendered
acceptable,that is,stabilized to zero[13,14] or kept
bounded[15]. The output tracking problem of a nonlinear
non-minimum phase VTOL aircraft was solved in [13] by a
Lyapunov-based technique and a minimum-norm strategy. However,the
internal dynamics which stands for the actual roll attitude of
aircraft was directly stabilized to zero. In fact,this method is
unfeasible for aircraft since it is impossible for its roll attitude
to keep unchanged when it performs trajectory maneuver.
Reference [15] pointed out that
the proper method for presenting acceptable
internal dynamics lies in finding a bounded solution for the
unstable internal dynamics to follow,rather than directly
stabilizing the internal dynamics to zero. The bound solution to the
internal dynamics is originally called the ideal internal dynamics
(IID) in [11,12] proposed noncausal stable inversion (NSI) method
to construct the bounded IID for non-minimum phase systems. To
obtain the causal IID for the unstable internal dynamics,[3]
originated the stable system center (SSC) method,which was used to
solve the IID of non-minimum phase VTOL aircraft in [16]. The output
regulation (OR) method in [17] can be used to find IID of
non-minimum phase systems by solving partial differential algebraic
equations.
As a survey on the control of nonlinear non-minimum phase systems,
[18] discussed the features of three methods for the IID solution as
follows: NSI is an iterative solution method,the desired
trajectories and any of their changes must be exactly known in
advance,the offline pre-computing procedure is conducted backward
in time,thus it can only get numerical and noncausal solutions,so
it is of limited practical use. Compared with NSI approach,SSC
method does not necessarily require the future information of the
desired trajectories which must be generated by an exosystem,the
online solving procedure for bounded IID is performed forward in
time,so the obtained numerical solutions are causal. OR method is
applied to tackle the system with linear internal dynamics,and can
provide accurate and analytical solutions.
Until now,there is few work about the output tracking control for
nonlinear non-minimum phase systems in output-feedback form. This
paper aims to solve this problem,and the contributions of this
work can be summarized as follows:
1) To keep the unstable internal dynamics bounded,the method of
output redefinition is introduced,thus the stability of the
internal dynamics depends on that of the newly defined output. In
the process of designing the control law,we only care about the
external dynamics which includes the newly defined output,and
disregard the internal dynamics,because it will get stable along
with the stability of the external dynamics.
2) To overcome the explosion of complexity problem in traditional
backstepping design,the dynamic surface control (DSC)[19]
method is firstly used to deal with the problem of tracking
control for the nonlinear non-minimum phase systems in
output-feedback form.
3) Benefiting from the bounded IID solved via SSC method,the
paper realizes the casual output tracking for a class of nonlinear
non-minimum phase systems.
The paper is organized as follows. In Section II,the class of
controlled nonlinear non-minimum phase system in output-feedback
form is introduced,and the control purpose is formulated. In
Section III,the methods of observer-based output redefinition and
the solution of IID are presented. In Section IV,the output
feedback DSC design procedure is provided. Section V gives the
stability analysis. In Section VI,a simulation example is given
to show the effectiveness of the proposed design method. Section
VII draws the conclusions.
Ⅱ. Problem Formulation
In the paper,we consider a class of nonlinear non-minimum
phase systems in the following output-feedback form:
|
$\begin{align}
& \dot{\eta }={{A}_{\eta }}\eta +{{B}_{\eta }}{{x}_{1}},\\
& {{{\dot{x}}}_{1}}={{x}_{2}}+{{\varphi }_{1}}(y),\\
& \qquad \qquad \vdots \\
& {{{\dot{x}}}_{n-1}}={{x}_{n}}+{{\varphi }_{n-1}}(y),\\
& {{{\dot{x}}}_{n}}={{E}_{\eta }}\eta +{{\varphi }_{n}}(y)+\beta (y)u,\\
& y={{x}_{1}},\\
\end{align}$
|
(1)
|
where $\eta \in {{R}^{m}}$ is internal dynamics;
$(x_{1},...,x_{n})$ is the external dynamics; $u$ is the control
input; $y$ is the output signal; Nonlinear items $\varphi _{i}(y)$
only depend on the output $y$,$i=1,$ $...,$ $n$. For all $y\in
R $,the function $\beta (y)\neq 0$. We assume the matrix
$A_{\eta }$ is non-Hurwitz,so when $x_{1}=0$,
the corresponding zero dynamics $\dot{\eta}=A_{\eta }\eta $ is not asymptotically stable,thus $
\eta $ is the unstable internal dynamics,system (1) can be called
non-minimum phase.
Since that the internal dynamics $\eta$ is unstable and only
output $y$ is measured,the control object is to design an output
feedback controller so that the system output $y$ can track the
desired trajectory signal $y_{d}(t)$,while the unstable internal
dynamics $\eta$ can follow its causal and bounded IID.
Ⅲ. Observe-based Output Redefinition
A.Observer Design
Since only the output signal $y$ in (1) is available for
measurement,a set of observers must be constructed to provide
estimates of the unmeasured state variables $\eta,$ $x_{2},...,
x_{n}$. To proceed,rewrite system (1) as
|
$\begin{align}
&\dot{x} =Ax+\varphi (y)+b\beta (y)u,\\
&y =cx,\label{2.2}
\end{align}$
|
(2)
|
in which
|
$\begin{align}
& x={{\left[\begin{matrix}
{{\eta }_{1\times m}},{{x}_{1}},...,{{x}_{n}} \\
\end{matrix} \right]}^{\text{T}}},\\
& \varphi (y)={{\left[\begin{matrix}
{{\mathbf{0}}_{1\times m}},{{\varphi }_{1}}(y),...,{{\varphi }_{n}}(y) \\
\end{matrix} \right]}^{\text{T}}},\\
& A=\left[\begin{matrix}
{{A}_{\eta }} & {{B}_{\eta }} & {{\mathbf{0}}_{m\times (n-1)}} \\
{{\mathbf{0}}_{(n-1)\times m}} & {{\mathbf{0}}_{(n-1)\times 1}} & {{I}_{n-1}} \\
{{E}_{\eta }} & 0 & {{\mathbf{0}}_{1\times (n-1)}} \\
\end{matrix} \right],\\
& b={{\left[\begin{matrix}
{{\mathbf{0}}_{1\times m}} & {{\mathbf{0}}_{1\times (n-1)}} & 1 \\
\end{matrix} \right]}^{\text{T}}} \\
& c=\left[\begin{matrix}
{{\mathbf{0}}_{1\times m}} & 1 & {{\mathbf{0}}_{1\times (n-1)}} \\
\end{matrix} \right],\\
\end{align}$
|
(3)
|
and $\mathbf{0}$,$I$ respectively stand for zero matrix and
identity matrix.
By choosing vector $k$ such that $A_{0}=A-kc$ is a Hurwitz
matrix,the following full-order observer is proposed for the purpose of the tracking control:
|
$\begin{align}
&\dot{\hat{x}} =A\hat{x}+k(y-\hat{y})+\varphi (y)+b\beta (y)u,\\
&\hat{y}=c\hat{x},
\end{align}$
|
(4)
|
where the parameter $k=(k^{\rm T}_{\eta },k_{1},... ,k_{n})^{\rm
T}$,and $k_{\eta }=(k_{\eta _{1}},$ $...,$ $k_{\eta _{m}})^{\rm
T}.$ Subtracting (4) from (2),the observer
error can be derived as
|
$\begin{align}
\dot{\tilde{x}}=A_{0}\tilde{x},\label{2.4}
\end{align}$
|
(5)
|
where $\tilde{x}=x-\hat{x}.$ Since $A_{0}$ is Hurwitz,the observer error $
\tilde{x}$ can exponentially converge to zero.
B.Output Redefinition
From (4),the observer equation of the internal dynamics can be
written as
|
$\dot{\hat{\eta }}={{A}_{\eta }}\hat{\eta }+{{B}_{\eta }}{{\hat{x}}_{1}}+{{k}_{\eta }}{{\tilde{x}}_{1}}.$
|
(6)
|
To tackle the unstable internal dynamics $\hat{\eta}$,the new
output is defined as
|
$\begin{align}
\bar{x}_{1}=\hat{x}_{1}+M\hat{\eta},\label{2.6}
\end{align}$
|
(7)
|
Thus (6) shows
|
$\dot{\hat{\eta }}={{A}_{\eta 0}}\hat{\eta }+{{B}_{\eta }}{{\bar{x}}_{1}}+{{k}_{\eta }}{{\tilde{x}}_{1}},$
|
(8)
|
where choosing $M$ to let $A_{\eta 0}=A_{\eta }-B_{\eta }M$ be
Hurwitz. Since the observer error $\tilde{x}_{1}\rightarrow 0,$
the stability of internal dynamics $\hat{\eta}$ in (8) depends on the newly defined output $\bar{x}_{1}.$
After output redefinition,system (4) can be separated into the
following two parts: new external dynamics
|
$\begin{gathered}
\begin{array}{*{20}{c}}
\cdot \\
{\bar x} \\
1
\end{array} = {{\hat x}_2} + {\varphi _1}(y) + {k_1}{{\tilde x}_1} + M\mathop {\hat \eta }\limits^. {\mkern 1mu} , \hfill \\
\begin{array}{*{20}{c}}
\cdot \\
{\hat x} \\
2
\end{array} = {{\hat x}_3} + {\varphi _2}(y) + {k_2}{{\tilde x}_1}, \hfill \\
\vdots \hfill \\
\begin{array}{*{20}{c}}
\cdot \\
{\hat x} \\
{n - 1}
\end{array} = {{\hat x}_n} + {\varphi _{n - 1}}(y) + {k_{n - 1}}{{\tilde x}_1}, \hfill \\
\begin{array}{*{20}{c}}
\cdot \\
{\hat x} \\
n
\end{array} = {E_\eta }\hat \eta + {\varphi _n}(y) + {k_n}\tilde x{\ _1} + \beta (y)u, \hfill \\
\end{gathered} $
|
(9)
|
and the internal dynamics (8). Hereafter,we only design control
law for the external dynamics $(\bar{x}_{1},\hat{x}_{2},...
,\hat{x}_{n})$ in (9),rather than the internal dynamics
$\hat{\eta},$ because it will get stable with the stability of the
external dynamics.
Remark 1. Note that the method of output redefinition
originated from [11] is slightly revised in this paper,and the
new output is based on the output observer system,rather than the
original system.
C.Solution of IID
It is necessary to know the desired value of new output
$\bar{x}_{1}$ before we design the output tracking control law. In
(7),the desired value of output observer $\hat{x}_{1}$ is $y_{d}$,
but what is the desired value of $\hat{\eta}$ ? In (6),$A_{\eta }$
is non-Hurwitz,so the internal dynamics does not have stable
numerical solution. However,this does not mean that a bounded
solution cannot be found for such an unstable system[15]. In
fact,under suitable assumptions,via NSI approach[12] or the
SSC method[3],
a bounded solution can be obtained. As to (6),setting $\hat{x}
_{1}=y_{d},$ $\tilde{x}$ $=$ $0$,we can get a bounded solution of
internal dynamics
|
$\begin{align}
\dot{\eta}_{d}=A_{\eta }\eta _{d}+B_{\eta }y_{d},\label{2.10}
\end{align}$
|
(10)
|
where $\eta _{d}$ is the so-called IID.
For the IID equation (10),we turn to the causal SSC method to
solve $\eta _{d}.$ For convenience,(10) can be rewritten as
|
$\begin{align}
\dot{\eta}_{d}=A_{\eta }\eta _{d}+\theta _{d}(y_{d}),\label{2.11}
\end{align}$
|
(11)
|
where $\theta _{d}(y_{d})=B_{\eta }y_{d}$. We assume $\theta _{d}$
can be generated by a known exosystem
|
$\begin{align}
\dot{w} =Sw,~~~ \theta _{d} =Cw. \label{2.12}
\end{align}$
|
(12)
|
Its characteristic polynomial is
|
$\begin{array}{*{35}{l}}
P(\lambda )= & \ \det (\lambda I-S) \\
= & \ {{\lambda }^{k}}+{{p}_{k-1}}{{\lambda }^{k-1}}+\cdots +{{p}_{1}}\lambda +{{p}_{0}}. \\
\end{array}$
|
(13)
|
Thus the causal IID $\eta _{d}$ can be solved by the following
matrix differential equation
|
$\begin{align}
\eta _{d}^{(k)}+&\ c_{k-1}\eta _{d}^{(k-1)}+\cdots +c_{1}\dot{\eta}
_{d}+c_{0}\eta _{d} \\
=&\ -(P_{k-1}\theta _{d}^{(k-1)}+\cdots +P_{1}\theta
_{d}+P_{0}\theta _{d}),\label{2.14}
\end{align}$
|
(14)
|
where the parameters $c_{k-1},... ,c_{1},c_{0}$ depend on the
desired eigenvalues,the matrix ${{P}_{k-1}},...,{{P}_{1}},{{P}_{0}}\in {{R}^{(n-r)\times (n-r)}}$ can be computed by the formula in
[3].
Ⅳ. Control Law Design
In this section,we design control law for the external dynamics
$(\bar{x}_{1},\hat{x}_{2},...,\hat{x}_{n})$ via dynamic surface
method.
Step 1. Let the first error surface of new output be defined
as
|
$\begin{align}
S_{1}=\bar{x}_{1}-\bar{x}_{1d},\label{3.1}
\end{align}$
|
(15)
|
where $\bar{x}_{1d}=y_{d}+M\eta _{d}.$ The time derivative of $S_{1}$ is
|
$\begin{align}
\dot{S}_{1}=\dot{\bar{x}}_{1}-\dot{\bar{x}}_{1d}=\hat{x}_{2}+\varphi
_{1}(y)+k_{1}\tilde{x}_{1}+M\dot{\hat{\eta}}-\dot{\bar{x}}_{1d}.
\label{3.2}
\end{align}$
|
(16)
|
Then a virtual control signal is selected as
|
$\begin{align}
\hat{x}_{2d}=-l_{1}S_{1}-\varphi _{1}(y)-k_{1}\tilde{x}_{1}-M\dot{\hat{\eta}}%
+\dot{\bar{x}}_{1d},\label{3.3}
\end{align}$
|
(17)
|
and the error between $\hat{x}_{2}$ and $\hat{x}_{2d}$ is defined
as
|
$\begin{align}
\tilde{x}_{2d}=\hat{x}_{2}-\hat{x}_{2d}. \label{3.4}
\end{align}$
|
(18)
|
|
$\begin{align}
\dot{S}_{1}=-l_{1}S_{1}+\tilde{x}_{2d}. \label{3.5}
\end{align}$
|
(19)
|
To avoid the explosion of terms in the process of computing $\dot{\hat{x}}
_{2d}$,we let $\hat{x}_{2d}$ pass through a low-pass filter
|
$\begin{align}
\tau _{2}\dot{\bar{x}}_{2d}+\bar{x}_{2d}=\hat{x}_{2d},~~~\bar{x}_{2d}(0)=\hat{x}
_{2d}(0),\label{3.6}
\end{align}$
|
(20)
|
where $\tau_{2}$ is a time constant. Thus $\bar{x}_{2d}$ is the
filtered signal of $\hat{x}_{2d}$.
Step ${\pmb i}$ (2$\leq$ ${\pmb i}$ ${\bf
\leq}$ ${\pmb n}$ ${\pmb -$} 1). Define the $i$-th error
surface as
|
$\begin{align}
S_{i}=\hat{x}_{i}-\bar{x}_{id},\label{3.7}
\end{align}$
|
(21)
|
then the time derivative of $S_{i}$ satisfies
|
$\begin{align}
\dot{S}_{i}=\dot{\hat{x}}_{i}-\dot{\bar{x}}_{id}=\hat{x}_{(i+1)}+\varphi
_{i}(y)+k_{i}\tilde{x}_{1}-\dot{\bar{x}}_{id}. \label{3.8}
\end{align}$
|
(22)
|
Choose a virtual control signal $\hat{x}_{(i+1)d}$ as
|
$\begin{align}
\hat{x}_{(i+1)d}=-l_{i}S_{i}-\varphi _{i}(y)-k_{i}\tilde{x}_{1}+\dot{\bar{x}}
_{id},\label{3.9}
\end{align}$
|
(23)
|
and define the error between $\hat{x}_{i+1}$ and $\hat{x}_{(i+1)d}$ as
|
$\begin{align}
\tilde{x}_{(i+1)d}=\hat{x}_{i+1}-\hat{x}_{(i+1)d}. \label{3.10}
\end{align}$
|
(24)
|
Thus we can get
|
$\begin{align}
\dot{S}_{i}=-l_{i}S_{i}+\tilde{x}_{(i+1)d}. \label{3.11}
\end{align}$
|
(25)
|
Letting $\bar{x}_{(i+1)d}$ be the filtered signal of
$\hat{x}_{(i+1)d}$,that is,
|
$\begin{align}
& {{\tau }_{i+1}}{{{\dot{\bar{x}}}}_{(i+1)d}}+{{{\bar{x}}}_{(i+1)d}}={{{\hat{x}}}_{(i+1)d}},\\
& {{{\bar{x}}}_{(i+1)d}}(0)={{{\hat{x}}}_{(i+1)d}}(0),\\
\end{align}$
|
(26)
|
where $\tau _{i+1}$ is a positive time constant.
Step ${\pmb n$.} Finally,define the $n$-th error surface
as
|
$\begin{align}
S_{n}=\hat{x}_{n}-\bar{x}_{nd},\label{3.13}
\end{align}$
|
(27)
|
thus
|
$\begin{array}{*{35}{l}}
{{{\dot{S}}}_{n}} & ={{{\dot{\hat{x}}}}_{n}}-{{{\dot{\bar{x}}}}_{nd}} \\
{} & ={{E}_{\eta }}\hat{\eta }+{{\varphi }_{n}}(y)+{{k}_{n}}{{{\tilde{x}}}_{1}}+\beta (y)u-{{\overset{.}{\mathop{{\bar{x}}}}\,}_{nd}}. \\
\end{array}$
|
(28)
|
The actual control signal is thus chosen as
|
$u=\frac{-{{l}_{n}}{{S}_{n}}-{{E}_{\eta }}\hat{\eta }-{{\varphi }_{n}}(y)-{{k}_{n}}{{{\tilde{x}}}_{1}}+{{\overset{.}{\mathop{{\bar{x}}}}\,}_{nd}}}{\beta (y)}.$
|
(29)
|
It could be readily checked that
|
$\begin{align}
\dot{S}_{n}=-l_{n}S_{n}. \label{3.16}
\end{align}$
|
(30)
|
Remark 2. According to the conventional backstepping
method[4,20],the actual control signal shows
|
$\begin{align}
u=\frac{1}{\beta (y)}\left(\alpha _{n}-E_{\eta
}\hat{\eta}+\bar{x}_{1d}^{(n)}\right),\label{2.33}
\end{align}$
|
(31)
|
where
|
$\begin{array}{*{35}{l}}
{{\alpha }_{n}}= & -{{l}_{n}}{{S}_{n}}-{{S}_{n-1}}-{{d}_{n}}{{\left( \frac{\partial {{\alpha }_{n-1}}}{\partial y} \right)}^{2}}{{S}_{i}}-{{k}_{i}}{{{\tilde{x}}}_{1}} \\
{} & -\frac{\partial {{\alpha }_{n-1}}}{\partial y}({{{\hat{x}}}_{2}}+{{\varphi }_{1}}(y)) \\
{} & -\sum\limits_{j=1}^{n-1}{\frac{\partial {{\alpha }_{n-1}}}{\partial {{{\hat{x}}}_{j}}}}({{\widehat{x}}_{j+1}}+{{\varphi }_{1}}(y)+{{k}_{j}}{{{\tilde{x}}}_{1}}) \\
{} & -\sum\limits_{j=1}^{m}{\frac{\partial {{\alpha }_{n-1}}}{\partial {{{\hat{\eta }}}_{j}}}}{{{\dot{\hat{\eta }}}}_{j}}-\sum\limits_{j=1}^{n-2}{\frac{\partial {{\alpha }_{n-1}}}{\partial \bar{x}_{1d}^{(j)}}}\bar{x}_{1d}^{(j+1)},\\
{{S}_{n}}= & \ {{{\hat{x}}}_{n}}-{{\alpha }_{n-1}}-\bar{x}_{1d}^{(n-1)},\\
{{\alpha }_{1}}= & -{{l}_{1}}{{S}_{1}}-{{d}_{1}}{{({{k}_{1}}+M{{k}_{\eta }})}^{2}}{{S}_{1}} \\
{} & -{{\varphi }_{1}}(y)-M{{A}_{\eta }}\hat{\eta }-M{{B}_{\eta }}{{{\hat{x}}}_{1}},\\
{{S}_{1}}= & \ {{{\bar{x}}}_{1}}-{{{\bar{x}}}_{1d}},\\
\end{array}$
|
(32-35)
|
and $S_{i},\alpha_{i}$ $(i=2,...,n-1)$ have similar forms as
$S_{n},\alpha_{n}$.
Obviously,compared with the backstepping method,the proposed DSC
scheme is simpler,and is easier to be realized in the practical
systems with the increase of the dimension $m$ of internal
dynamics and system relative order $n$.
Ⅴ. Stability Analysis
In this section,we will give the stability analysis for the
proposed output-feedback DSC scheme. While the control law design
procedure is simple,the stability analysis is relatively
complicated due to the derivation of low-pass filter. Firstly,
define the filter error as
|
$\begin{align}
z_{i}=\hat{x}_{id}-\bar{x}_{id},~~~i=2,... ,n. \label{3.17}
\end{align}$
|
(36)
|
Taking (26) into consideration,the time derivative of $
\bar{x}_{id}$ shows
|
$\begin{align}
\dot{\bar{x}}_{id}=\frac{1}{\tau _{i}}(\hat{x}_{id}-\bar{x}_{id})=\frac{1}{
\tau _{i}}z_{i}. \label{3.18}
\end{align}$
|
(37)
|
Thus
|
$\begin{align}
\dot{z}_{i}=\dot{\hat{x}}_{id}-\dot{\bar{x}}_{id}=-\frac{1}{\tau _{i}}z_{i}+
\dot{\hat{x}}_{id}. \label{3.19}
\end{align}$
|
(38)
|
By considering (21) and (36),$\tilde{x}_{id}$ in (24) can be
rewritten as
|
$\begin{align}
\tilde{x}_{id}& =\hat{x}_{i}-\hat{x}_{id}\\
& =\hat{x}_{i}-\bar{x}_{id}+\bar{x}_{id}-\hat{x}_{id}\\
& =S_{i}-z_{i}. \label{3.20}
\end{align}$
|
(39)
|
So the error surface in (19) and (25) can be described as
|
$\begin{align}
\dot{S}_{i}=-l_{i}S_{i}+S_{i+1}-z_{i+1},\quad i=1,...,n-1.
\end{align}$
|
(40)
|
On the other side,from (5)-(17),(21)-(23),we can obtain
|
$\begin{align}
\dot{z}_{i}& +\frac{1}{\tau _{i}}z_{i} \\
& =\dot{\hat{x}}_{id}
\leq B_{i}(S_{i-1},S_{i},z_{i},\tilde{x},\bar{x}_{(i-1)d},\dot{\bar{x}}_{(i-1)d},\ddot{\bar{x}}_{(i-1)d}),\\
&\qquad\qquad\qquad\qquad\qquad\qquad\qquad\qquad\ \ i=2,...,n,
\label{3.22}
\end{align}$
|
(41)
|
where $B_{i},$ $i=2,...,n,$ are continuous positive functions.
Thus
|
$\begin{align}
z_{i}\dot{z}_{i} &\leq -\frac{1}{\tau _{i}}z_{i}^{2}+B_{i}\left\vert
z_{i}\right\vert \\[1mm]
& \leq \left(\frac{B_{i}^{2}}{2\alpha _{i}}-\frac{1}{\tau _{i}}\right)z_{i}^{2}+\frac{1
}{2}\alpha _{i},\quad i=2,...,n,\label{3.23}
\end{align}$
|
(42)
|
where $\alpha _{i}$ are positive constants.
Secondly,define the tracking error of internal dynamics as
|
$\begin{align}
\tilde{\eta}=\hat{\eta}-\eta _{d}. \label{3.24.1}
\end{align}$
|
(43)
|
According to (8),(10) and (15),we can get
|
$\dot{\tilde{\eta }}={{A}_{\eta 0}}\tilde{\eta }+{{B}_{\eta }}{{S}_{1}}+{{k}_{\eta }}\tilde{x}$
|
(44)
|
By considering the aforementioned equations,the resulting
closed-loop system can be expressed as
|
$\dot{\tilde{x}}={{A}_{0}}\tilde{x},$
|
(45)
|
|
$\dot{\tilde{\eta }}={{A}_{\eta 0}}\tilde{\eta }+{{B}_{\eta }}{{S}_{1}}+{{k}_{\eta }}{{\widetilde{x}}_{1}},$
|
(46)
|
|
${{{\dot{S}}}_{i}}=-{{l}_{i}}{{S}_{i}}+{{S}_{i+1}}-{{z}_{i+1}},\quad i=1,...,n-1,$
|
(47)
|
|
${{{\dot{S}}}_{n}}=-{{l}_{n}}{{S}_{n}},$
|
(48)
|
|
${{z}_{i}}{{\dot{z}}_{i}}\le \left( \frac{B_{i}^{2}}{2{{\alpha }_{i}}}-\frac{1}{{{\tau }_{i}}} \right)z_{i}^{2}+\frac{1}{2}{{\alpha }_{i}},\quad i=2,...,n.$
|
(49)
|
Next,we present the following theorem.
Theorem 1. Consider the Lyapunov function candidate as
|
$\begin{align}
V=\sum_{i=0}^{n}V_{i},\label{3.30}
\end{align}$
|
(50)
|
where
|
${{V}_{0}}={{{\tilde{\eta }}}^{\text{T}}}{{P}_{\eta }}\tilde{\eta }+{{{\tilde{x}}}^{\text{T}}}{{P}_{0}}\tilde{x},$
|
(51)
|
|
${{V}_{i}}=\frac{1}{2}S_{i}^{2}+\frac{{{d}_{i}}}{2}z_{i+1}^{2},\quad 1\le i\le n-1,$
|
(52)
|
|
${{V}_{n}}=\frac{1}{2}S_{n}^{2},$
|
(53)
|
and $P_{\eta }=P_{\eta }^{\rm T},P_{0}=P_{0}^{\rm T}$ respectively
stand for the symmetric positive solutions of $P_{\eta }A_{\eta
0}+A_{\eta 0}^{\rm T}P_{\eta }=-I$,$P_{0}A_{0}+A_{0}^{\rm T}P_{0}$ $=$ $-I$,$A_{\eta 0}$ is defined by (8). For the given compact set $\Omega $,if
|
$\begin{align}
V(0)=\sum_{i=0}^{n}V_{i}(0)\leq R_{0},\label{3.34}
\end{align}$
|
(54)
|
then there exist $\gamma,$ $r$,$l_{i}$ $(i=1,...,n),$ $d_{i}$
$(i=1,...,n-1),$ and $\tau _{i}$ $ (i=2,...,n)$ to let all
signals of the closed-loop system be bounded,the tracking errors
can converge to some residual sets that can be made arbitrarily
small by properly choosing certain design parameters.
Proof. The time derivative of $V_{0}$
is
|
$\begin{array}{*{35}{l}}
{{{\dot{V}}}_{0}}= & \ {{{\tilde{\eta }}}^{\text{T}}}A_{\eta 0}^{\text{T}}{{P}_{\eta }}\tilde{\eta }+{{\eta }^{\text{T}}}{{P}_{\eta }}{{A}_{\eta 0}}\tilde{\eta }+{{S}_{1}}B_{\eta }^{\text{T}}{{P}_{\eta }}\eta \\
{} & +{{{\tilde{\eta }}}^{\text{T}}}{{P}_{\eta }}{{B}_{\eta }}{{S}_{1}}+{{{\tilde{x}}}_{1}}k_{\eta }^{\text{T}}{{P}_{\eta }}\tilde{\eta }+{{{\tilde{\eta }}}^{\text{T}}}{{P}_{\eta }}{{k}_{\eta }}{{{\tilde{x}}}_{1}} \\
{} & +{{{\tilde{x}}}^{\text{T}}}A_{0}^{\text{T}}{{P}_{0}}\tilde{x}+{{{\tilde{x}}}^{\text{T}}}{{P}_{0}}{{A}_{0}}\tilde{x} \\
= & -{{{\tilde{\eta }}}^{\text{T}}}\hat{\eta }+\gamma S_{1}^{2}+\frac{1}{\gamma }{{{\tilde{\eta }}}^{\text{T}}}(P_{\eta }^{\text{T}}{{B}_{\eta }}B_{\eta }^{\text{T}}{{P}_{\eta }})\tilde{\eta } \\
{} & +\gamma \tilde{x}_{1}^{2}+\frac{1}{\gamma }{{{\tilde{\eta }}}^{\text{T}}}(P_{\eta }^{\text{T}}{{k}_{\eta }}k_{\eta }^{\text{T}}{{P}_{\eta }})\tilde{\eta }-{{{\tilde{x}}}^{\text{T}}}\tilde{x} \\
\le & -\left( \frac{1}{{{\lambda }_{\max }}({{P}_{\eta }})}-\frac{{{\lambda }_{\max }}(P_{\eta }^{\text{T}}{{B}_{\eta }}B_{\eta }^{\text{T}}P)}{\gamma {{\lambda }_{\min }}({{P}_{\eta }})} \right. \\
{} & amp;\left. -\frac{{{\lambda }_{\max }}(P_{\eta }^{\text{T}}{{k}_{\eta }}k_{\eta }^{\text{T}}{{P}_{\eta }})}{\gamma {{\lambda }_{\min }}({{P}_{\eta }})} \right){{{\tilde{\eta }}}^{\text{T}}}{{P}_{\eta }}\tilde{\eta } \\
{} & amp;+\gamma S_{1}^{2}-\left( \frac{1}{{{\lambda }_{\max }}({{P}_{0}})}-\frac{\gamma }{{{\lambda }_{\min }}({{P}_{0}})} \right){{{\tilde{x}}}^{\text{T}}}{{P}_{0}}\tilde{x}. \\
\end{array}$
|
(55)
|
The derivative of $V_{i}$ satisfies
|
$\begin{array}{*{35}{l}}
{{{\dot{V}}}_{i}}= & \ {{S}_{i}}(-{{l}_{i}}{{S}_{i}}+{{S}_{i+1}}-{{z}_{i+1}})+{{d}_{i}}{{z}_{i+1}}{{{\dot{z}}}_{i+1}} \\
\le & -{{l}_{i}}S_{i}^{2}+S_{i}^{2}+\frac{1}{2{{d}_{i}}}S_{i+1}^{2}+\frac{{{d}_{i}}}{2}z_{i+1}^{2} \\
{} & +{{d}_{i}}\left( \frac{B_{i+1}^{2}}{2{{\alpha }_{i+1}}}-\frac{1}{{{\tau }_{i+1}}} \right)z_{i+1}^{2}+\frac{{{d}_{i}}}{2}{{\alpha }_{i+1}} \\
\le & -({{l}_{i}}-1)S_{i}^{2}+\frac{1}{2{{d}_{i}}}S_{i+1}^{2} \\
{} & -{{d}_{i}}\left( \frac{1}{{{\tau }_{i+1}}}-\frac{B_{i+1}^{2}}{2{{\alpha }_{i+1}}}-\frac{1}{2} \right)z_{i+1}^{2}+\frac{{{d}_{i}}}{2}{{\alpha }_{i+1}}. \\
\end{array}$
|
(56)
|
Define the compact set as
|
$\begin{align}
\Omega =&\ \bigg\{(S_{1},...,S_{n},z_{2},...,z_{n},\tilde{x},\eta_{d},\bar{x}
_{1d},...,\bar{x}_{(n-1)d},\\
&\quad\ \dot{\bar{x}}_{1d},...
,\dot{\bar{x}}_{(n-1)d},\ddot{\bar{x}}_{1d},...
,\ddot{\bar{x}}_{(n-1)d}) : \\
&\quad \sum_{i=1}^{n}S_{i}^{2}+\sum_{i=2}^{n}z_{i}^{2}+\tilde{x}^{\rm T}\tilde{x}
+\eta _{d}^{\rm T}\eta _{d}+\sum_{i=2}^{n}\bar{x}_{(i-1)d}^{2} \\
&\quad +\sum_{i=2}^{n}\dot{\bar{x}}
_{(i-1)d}^{2}+\sum_{i=2}^{n}\ddot{\bar{x}}_{(i-1)d}^{2} \leq
R_{0}\bigg\},
\end{align}$
|
(57)
|
where $R_{0}$ is a positive constant. Since $B_{i+1}$ defined by
(41) is continuous,it has a maximum value in $\Omega $,i.e.,
$M_{i+1}$. So the derivative of $V_{i}$ shows
|
$\begin{array}{*{35}{l}}
{{{\dot{V}}}_{i}}\le & -({{l}_{i}}-1)S_{i}^{2}+\frac{1}{2{{d}_{i}}}S_{i+1}^{2} \\
{} & -{{d}_{i}}\left( \frac{1}{{{\tau }_{i+1}}}-\frac{M_{i+1}^{2}}{2{{\alpha }_{i+1}}}-\frac{1}{2} \right)z_{i+1}^{2}+\frac{{{d}_{i}}}{2}{{\alpha }_{i+1}}. \\
\end{array}$
|
(58)
|
Finally,in view of (30),the derivative of $V_{n}$ yields
|
$\begin{align}
\dot{V}_{n}=S_{n}\dot{S}_{n}=-l_{n}S_{n}^{2}. \label{3.38}
\end{align}$
|
(59)
|
So
|
$\begin{align}
\dot{V} \leq& -\left(\frac{1}{\lambda _{\max }(P_{\eta
})}-\frac{\lambda _{\max }(P_{\eta }^{\rm T}B_{\eta }B_{\eta }^{\rm
T}P)}{\gamma \lambda _{\min }(P_{\eta })}\right.
\\
& \left.-\frac{\lambda _{\max }(P_{\eta }^{\rm T}k_{0}k_{0}^{\rm
T}P_{\eta })}{\gamma
\lambda _{\min }(P_{\eta })}\right)\hat{\eta}^{\rm T}P_{\eta }\hat{\eta} \\
& -\left(\frac{1}{\lambda_{\max}(P_{0})}-\frac{\gamma}{\lambda_{\min}(P_{0})}\right)\tilde{x}^{\rm T}P_{0}\tilde{x} \\
& +\frac{1}{2}\sum_{i=1}^{n-1}d_{i}\alpha _{i+1}-\sum_{i=1}^{n-1}\left(c_{i}-\frac{
1}{2d_{i}}-1-\gamma\right)S_{i}^{2} \\
& -\sum_{i=1}^{n-1}\left(\frac{1}{\tau _{i+1}}-\frac{M_{i+1}^{2}}{2\alpha _{i+1}}-
\frac{1}{2}\right)d_{i}z_{i+1}^{2} \\
& +\left(l_{n}-\frac{1}{2}\right)S_{n}^{2}.
\end{align}$
|
(60)
|
Then let the design parameters
|
$\begin{align}
& \frac{1}{{{\lambda }_{\max }}({{P}_{\eta }})} \\
& \ \quad =2r+\frac{{{\lambda }_{\max }}(P_{\eta }^{\text{T}}{{B}_{\eta }}B_{\eta }^{\text{T}}P)}{\gamma {{\lambda }_{\min }}({{P}_{\eta }})}\times \frac{{{\lambda }_{\max }}(P_{\eta }^{\text{T}}{{k}_{\eta }}k_{\eta }^{\text{T}}{{P}_{\eta }})%}{\gamma {{\lambda }_{\min }}({{P}_{\eta }})},\\
\end{align}$
|
(61)
|
|
$\frac{1}{{{\lambda }_{\max }}({{P}_{0}})}=2r+\frac{\gamma }{{{\lambda }_{\min }}({{P}_{0}})},$
|
(62)
|
|
${{l}_{i}}=r+\frac{1}{2{{d}_{i}}}+1+\gamma ,$
|
(63)
|
|
$\frac{1}{{{\tau }_{i+1}}}=r+\frac{M_{i+1}^{2}}{2{{\alpha }_{i+1}}}+\frac{1}{2},$
|
(64)
|
|
${{l}_{n}}=r+\frac{1}{2},$
|
(65)
|
where $r$ is a positive constant,it follows that
|
$\begin{align}
\dot{V}\leq -2rV+M,\label{3.41}
\end{align}$
|
(66)
|
where
|
$\begin{align}
M=\frac{1}{2}\sum_{i=1}^{n-1}d_{i}\alpha _{i}. \label{3.42}
\end{align}$
|
(67)
|
So when $V=R_{0}$,we have $\dot{V}\leq -2rR_{0}+M$. That is,if
$r$ is chosen such that
|
$\begin{align}
r>\frac{M}{2R_{0}},
\end{align}$
|
(68)
|
we have $\dot{V}<0$ on $V=R_{0}$,which implies that if $V(0)\leq
R_{0}$,then $V(t)\leq R_{0}$ for all $t\geq 0$,i.e.,$V\leq
R_{0}$ is an invariant set. Moreover,solving (66) yields
|
$\begin{align}
0\leq V\leq \frac{M}{2r}+\left(V(0)-\frac{M}{2r}\right){\rm
e}^{-2rt}.
\end{align}$
|
(69)
|
Hence
|
$\begin{align}
\mathop{{\lim }}_{{\rm T}\rightarrow {0}}V(t)\leq \frac{M}{2r}.
\end{align}$
|
(70)
|
That is,by properly choosing $\gamma ,$ $l_{i}$ $(i=1,... ,n),$
$d_{i}$ $(i=1,$ $...,$ $n-1),$ $\tau _{i}$ $(i=2,...,n)$ to
make $M$ sufficiently small,$r$ sufficiently large,the tracking
error $S_{i}$ $(i=1,...,n)$ can
converge to any arbitrary small residual set. Since the observer error $
\tilde{x}$ exponentially converges to zero,and the desired output signal $
y_{d}$ and the IID $\eta _{d}$ are all bounded,so all the signals
of the closed-loop system are uniformly bounded.
Ⅵ. Simulation Results
We consider the following nonlinear non-minimum phase system:
|
$\begin{align}
&\dot{x}_{1} =x_{2}+\sin y,\\
&\dot{x}_{2} =x_{3}+y,\\
&\dot{x}_{3} =\eta+100(y^{2}+1)u,\\
&\dot{\eta} =\eta+x_{1},\\
&y =x_{1},\label{3.46}
\end{align}$
|
(71)
|
where $\eta$ is the unstable internal dynamics. The goal is to
apply the proposed output-feedback DSC scheme to (71) so that the
system output $y$ and the internal dynamics $\eta$ can
respectively track their desired signals $y_{d}$ and $\eta_{d}$.
A.IID Solution via SSC Method
At the beginning of the simulation,we firstly need to solve the IID
$\eta _{d}$ of system (71) according to the SSC method described as
(11)-(14). As to the internal dynamics equation $\dot{\eta}$ $=$
$\eta+x_{1}$,by setting $x_{1}=y_{d}$,its corresponding IID
equation shows
|
$\begin{align}
\dot{\eta}_{d}=\eta _{d}+y_{d}. \label{3.46.1}
\end{align}$
|
(72)
|
By selecting the desired trajectory signal $y_{d}=R\cos (\omega
t)$,it can be generated by the following exosystem
|
$\begin{align}
& \dot{w}=Sw,\\
& S=\left( \begin{matrix}
0 & \omega \\
-\omega & 0 \\
\end{matrix} \right),\\
\end{align}$
|
(73)
|
whose characteristic polynomial is
|
$\begin{align}
P(\lambda )=\left\vert \lambda I-S\right\vert =\lambda ^{2}+\omega
^{2}. \label{2.58}
\end{align}$
|
(74)
|
According to the above equation,we can get $k=2$,$p_{1}=0$ and
$p_{0}=\omega ^{2}.$ By setting the desired eigenvalues
$s_{1,2}=-1,$ thus the parameters of the characteristic polynomial
are $c_{0}=$ $1,$ $c_{1}=2$. Via the SSC method in
3,we can get
|
$\begin{align}
& {{P}_{1}}=(I+2Q_{1}^{-1}+Q_{1}^{-2}){{(I+{{\omega }^{2}}Q_{1}^{-2})}^{-1}}-I=\frac{3-{{\omega }^{2}}}{1+{{\omega }^{2}}},\\
& {{P}_{0}}={{c}_{0}}Q_{1}^{-1}-({{P}_{1}}+I){{p}_{0}}Q_{1}^{-1}=\frac{1-3{{\omega }^{2}}}{1+{{\omega }^{2}}},\\
\end{align}$
|
(75)
|
where $Q_{1}=A_{\eta }=1$. By taking the parameters $c_{0},$ $c_{1},$ $
P_{1}$ and $P_{0}$ into the matrix differential equation (14),the
IID $\eta_{d}$ can be solved from the following equation:
|
$\begin{align}
\ddot{\eta}_{d}+c_{1}\dot{\eta}_{d}+c_{0}\eta _{d}=-(P_{1}\dot{\theta}
_{d}+P_{0}\theta _{d}). \label{3.49}
\end{align}$
|
(76)
|
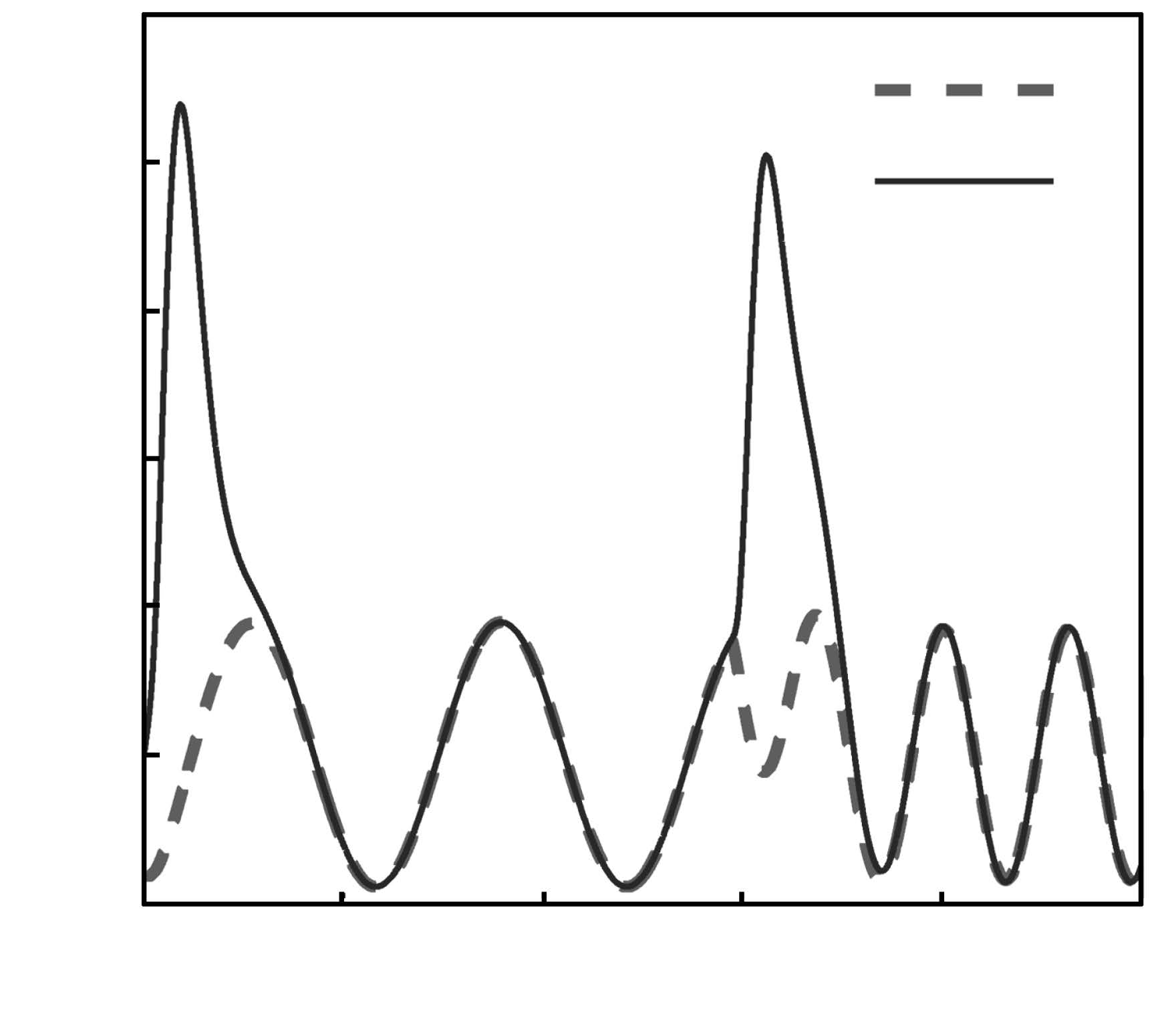
B.IID Comparison
Here through the IID equation (72),we give a detailed comparison
of IID solved via the aforementioned methods: NSI,SSC,OR.
Through OR method,the accurate and analytical bounded solution is
|
$\begin{align}
\eta_{d}=\frac{R\omega ^{2}\cos(\omega t)+R\omega\sin(\omega
t)}{1+\omega ^{2}}.
\end{align}$
|
(77)
|
Detailed solution procedure of NSI and OR methods can be found in
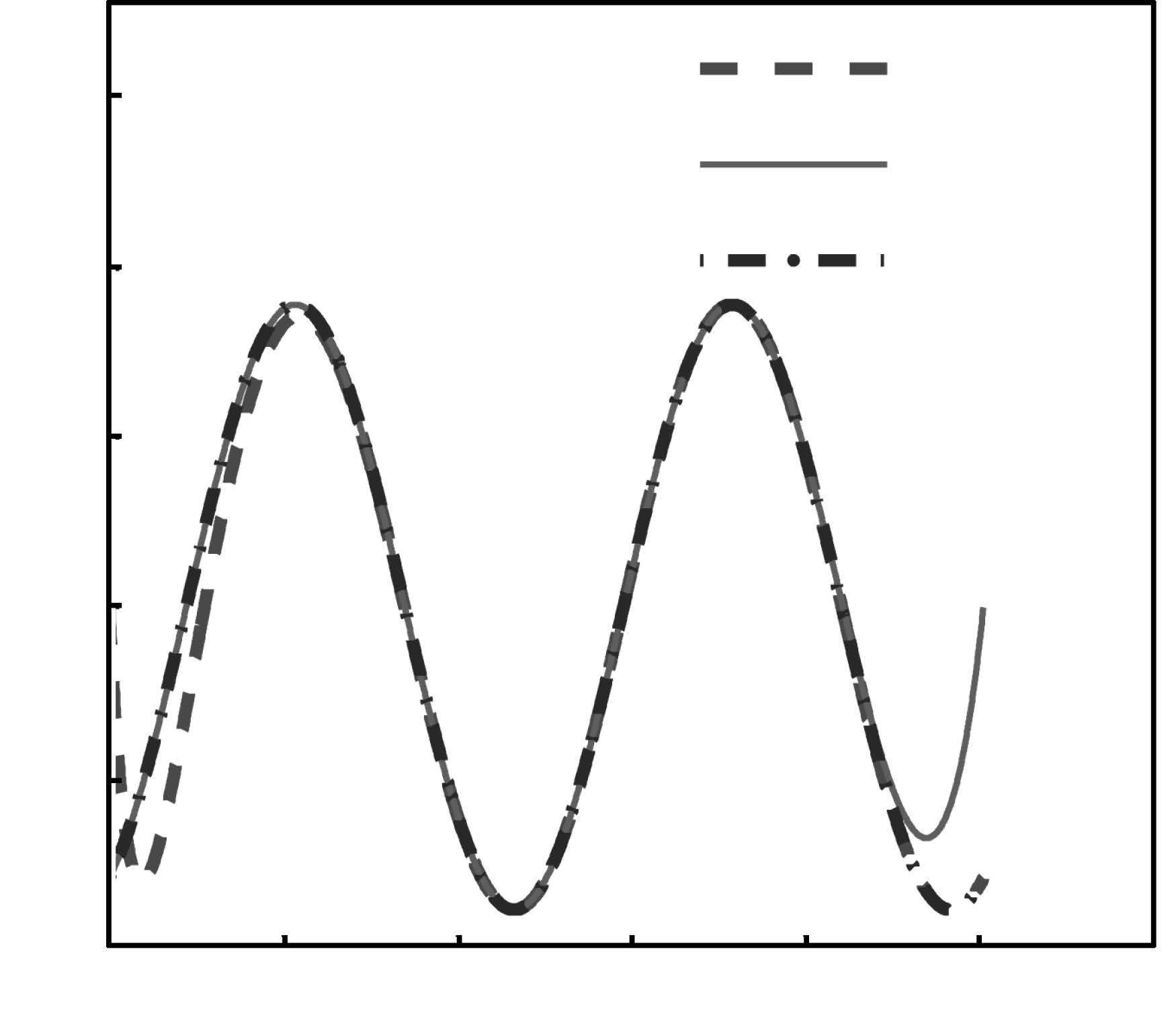
17. By selecting $R=1$,$\omega=1$,the solved IID $\eta _{d}$
of the system (71) can be seen in
Fig.1.
From Fig.1,it can be seen that the IID solved via SSC method
gradually converge to the accurate and analytical IID solved via
OR method,while the IID solved NSI method would diverge from the
IID solved via OR method at the end of simulation time,because
the off-line pre-computing procedure of NSI method is conducted
backward in time. Due to the limited practical use of NSI method,
we turn to the SSC method to get the causal IID of (71).
C.Simulation Results
The system initial states are selected as $x(0)=(0.95,$ $0,$ $0,$
$0)^{\rm T}$,$\hat{x}(0)=(1,0,0,0)^{\rm T}$,$\eta_{d}(0)=-0.8$;
The observer gain is selected as $k=(13,67,175,257)^{\rm T}$ to let
the eigenvalues of $A_{0}$ be $-3$. The controller parameters
$l_{1}=l_{2}=l_{3}=15$,the filter time constant $\tau
_{2}=\tau_{3}=0.01$. The output transformation matrix is chosen as
$M=2$ to place the eigenvalues of $A_{\eta 0}$ at $-1$. The desired
output signal is selected as $y_{d}=R\cos(\omega t)$. To illustrate
the effectiveness of the proposed control scheme,the simulations
are done under the following two cases.
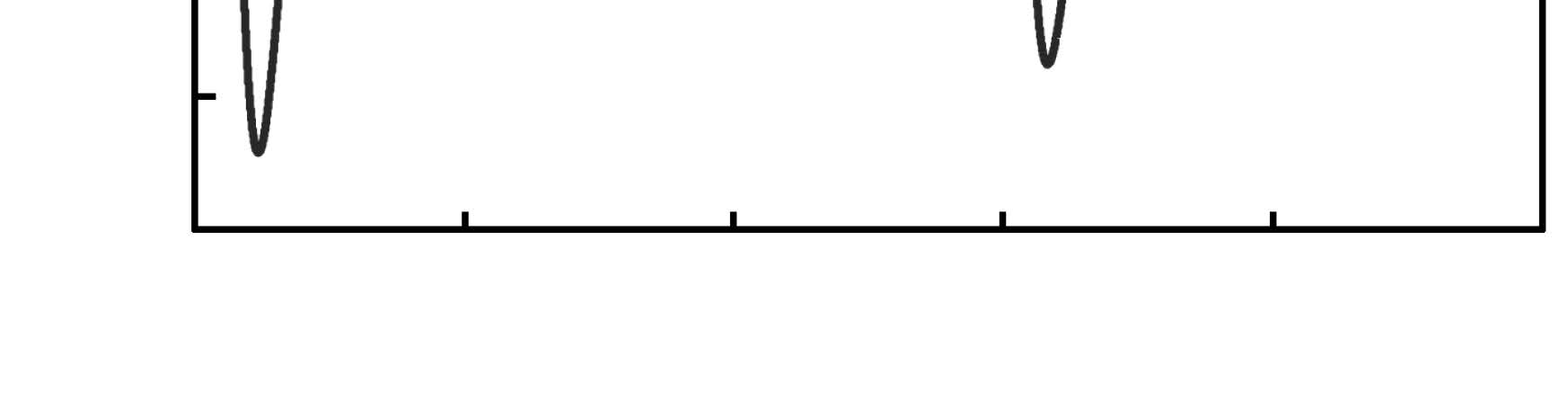
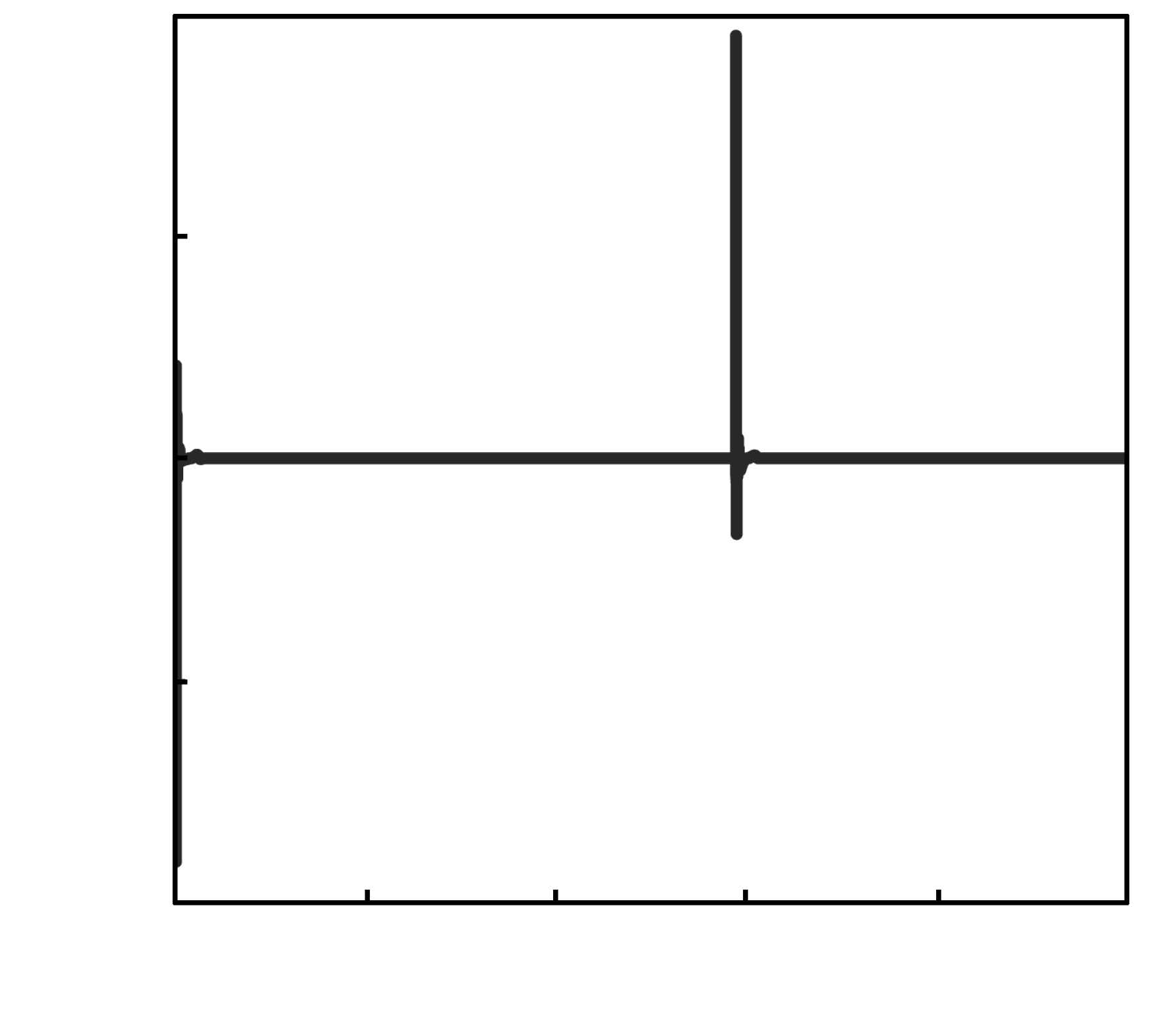
Case 1. Without solving the IID $\eta_{d}$,we directly set
$\eta_{d}=0$,and simultaneously select $R=1$,$\omega=0.5$. Under
this circumstance,we mean to stabilize the internal dynamics to
zero. However,from the simulation results (Fig.2 and 3),it can
be seen that the tracking performance is poor,and the internal
dynamics does not converge to zero at all. From this simulation
case,we can see that it is unavoidable to solve the IID $\eta_{d}$
which plays an important pole in acquiring fine output tracking
performance.
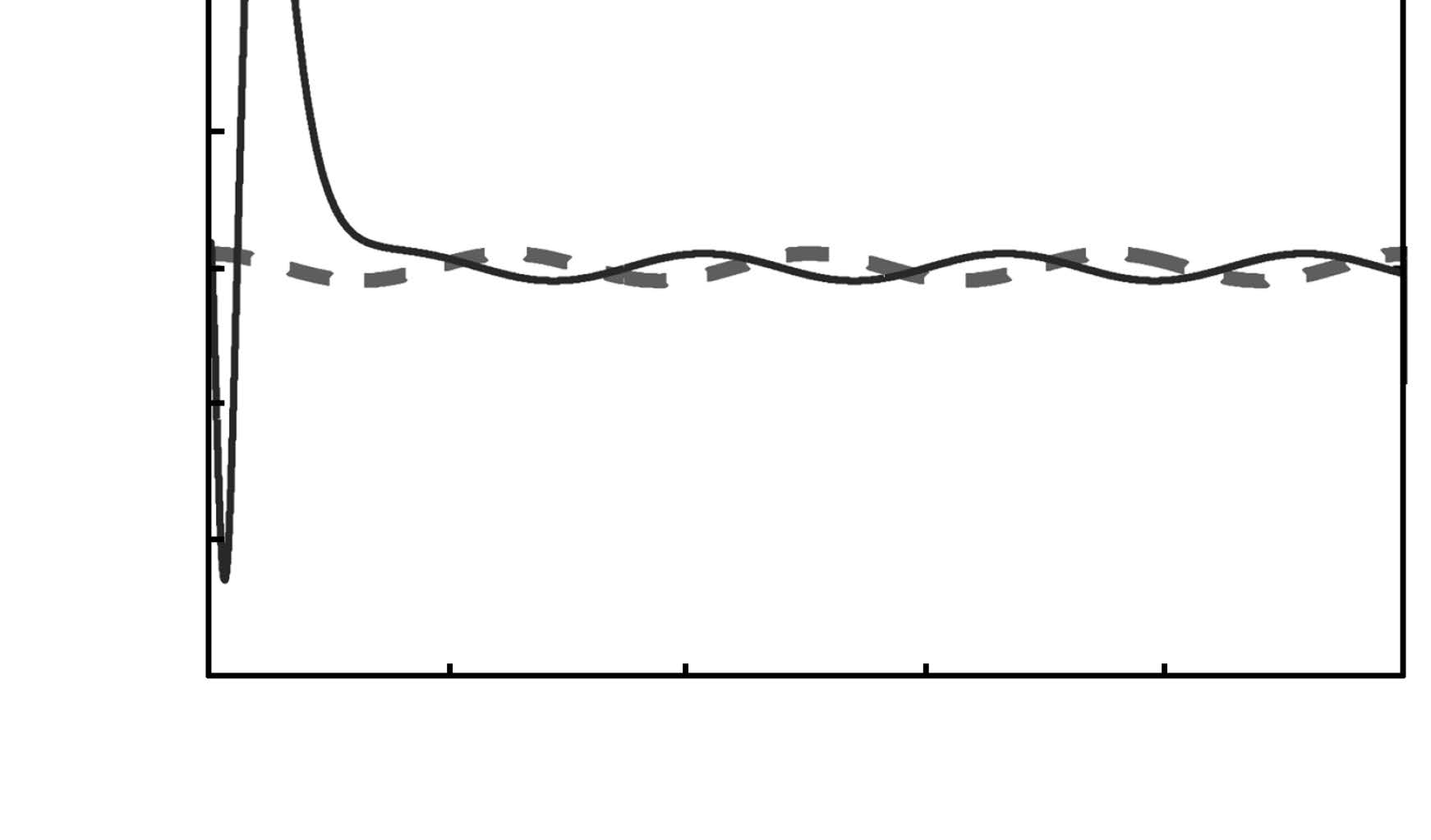
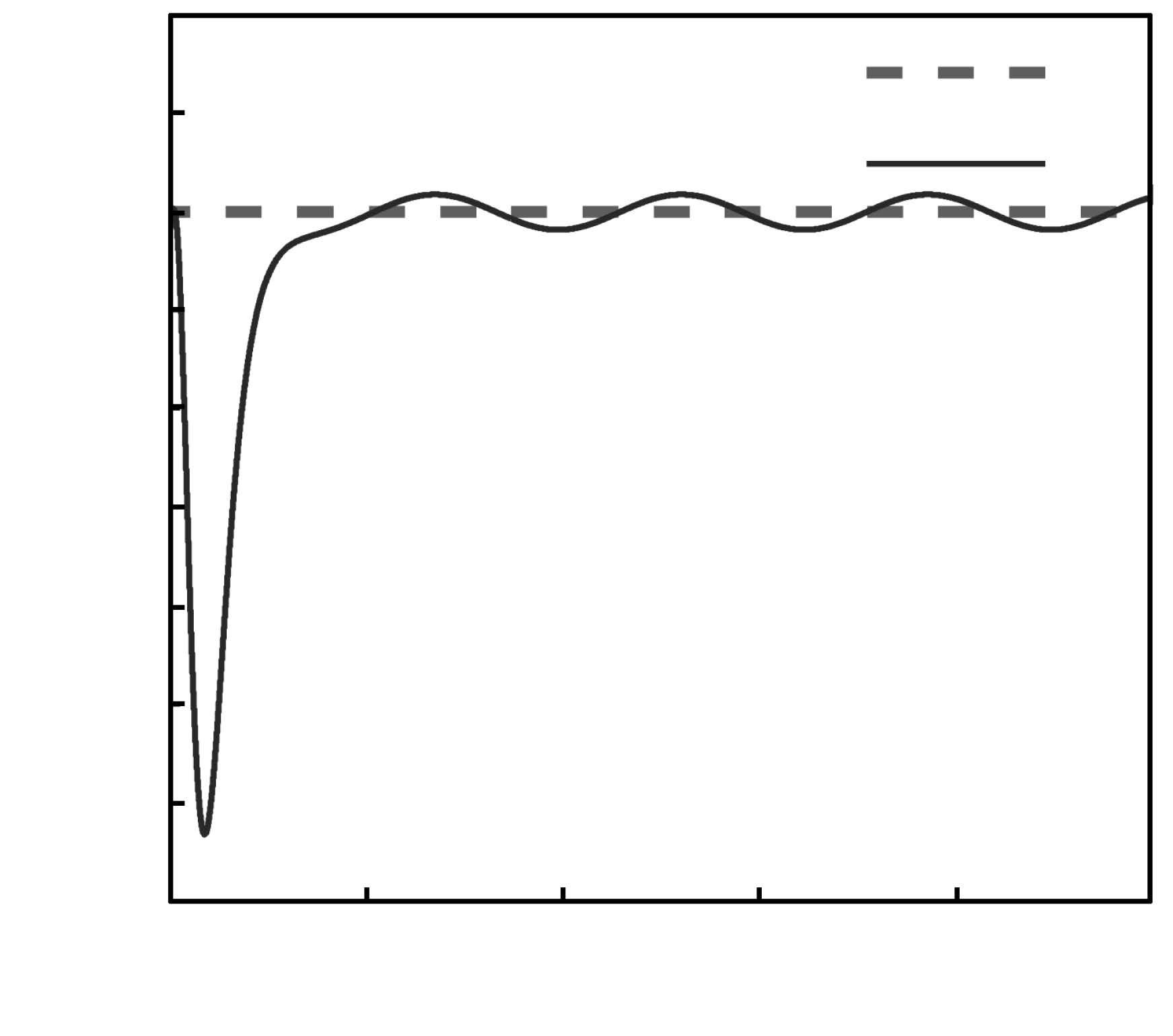
Case 2. The IID $\eta_{d}$ is solved via the SSC method,and
the amplitude $R$ and the frequency $\omega$ of the desired output
trajectory $y_{d}$ switch from $1$ to $1.2$ and $0.5$ to $1$,
respectively,at random time $T=25+5\times {rand}(1)$. Such switches
may occur in the case of obstacle avoidance. From the simulation
results (Figs. 4-6),it can be concluded that the output tracking
performance is fine,and the internal dynamics can track its
corresponding casual IID despite the fact that the amplitude and
frequency of the desired signal $y_{d}$ change at any random time.
Through the simulation cases,the following conclusions can be
drawn:
1) It is necessary to solve the IID which is fundamental to achieve
desired tracking performance when dealing with non-minimum phase systems.
2) Based on output redefinition,the proposed output-feedback DSC
controller for nonlinear non-minimum phase systems is effective.
Ⅶ. Conclusion
The paper has proposed an output-feedback tracking control scheme
for a class of nonlinear non-minimum phase systems via DSC method.
After output redefinition,we directly design control law for the
external dynamics rather than the internal dynamics,because the
internal dynamics will get stable with the stability of the
external dynamics. The proposed output-feedback DSC controller not
only drives the system output signal to track the desired
trajectory,but also makes the unstable internal dynamics to
follow its corresponding bounded IID. The stability analysis has
proved that the tracking errors can converge to zero and the
closed-loop system is semi-globally stable. The effectiveness of
the proposed output-feedback DSC control scheme has been
illustrated by the simulation results.
 2016, Vol.3
2016, Vol.3 



{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}