 2016, Vol.3
2016, Vol.3 



2. the School of Management and Economics, Beijing Institute of Technology, Beijing 100081, China;
3. the School of Mechatronics, Northwestern Polytechnical University, Xi’an 710072, China
Reliability of the repairable system has been
widely investigated by scholars in the past few decades. Some results
were summarized in
The environment condition in which the system operates influences
the performance of the system,so that the environment cannot be
ignored when we evaluate the system performance. For example,
systems under very high strength fail mainly due to temperature,
voltage or vibrations; motors can fail under vibrations of high
intensity,or other environments. Therefore,shock models were
studied extensively in the past decades. Markov arrival process
(MAP) is an important point process,and it has been widely applied
in the field of queuing theory. Recently,MAP has been used for
modeling the shock arrival in the reliability domain by several
Spain scholars,such as
However,in these papers the system operated only in two
environments or two regimes switching. Reliability indexes of the
system operating in complex environments were very poor. This
motives us to study the reliability of systems under multiple
environments. Our model is motivated by Cekyay and
$\ddot{O}$zekici
The rest of paper is organized as follows. In Section Ⅱ,the system is presented and the Markov process governing the system is constructed. In Section Ⅲ,the system reliability and the environment reliability are derived,respectively. The system availability and the environment availability are given, respectively in Section Ⅳ. In Section Ⅴ,a numerical application is performed. Concluding remarks are offered in the last section.
Ⅱ. The modelWe assume that the system operates in multiple environments. The environment process $\{X(t):t\ge 0\}$ is a Markov process with a finite state space $E=\{e_1 ,e_2 ,... ,e_m \}$,transition rate matrix ${{H}}$,and the initial probability vector ${\rm {\bf \alpha }}=$ $( 1,0,... ,0)_{1\times m} $. The deterioration process of the system is denoted by $\{Y(t):t\ge 0\}$. Its finite state space is denoted by $S=\{1,2,... ,n\}$,where some states are changeable,i.e.,they may be open in some environments,closed in others environments. When the system operates in $e_i\in E$,the state space of the system can be partitioned as $S=\{1,$ $...,$ $n_i \}\cup \{n_i +1,... ,n\}=W_i \cup F_i $,where $W_i $ and $F_i $ denote working states and failure states,respectively. The infinitesimal generator of $\{Y(t):t\ge 0\}$ in the environment $e_i $ is ${{G}}_i $.
Let $Z(t)=\left( {X(t),Y(t)} \right)$,then the combined,bivariate stochastic process $\{Z(t),t\ge 0\}$ models the interaction between environment and deterioration. Its state space is $E\times S$,the Cartesian product of the individual state spaces $E$ and $S$. Because of independence of the component processes,$\{Z(t),$ $t \ge 0\}$ is a Markov process with transition rate matrix ${ { G}}=$ $( G(i,a;j,b))$,where $G(i,a;j,b)=\left\{ \begin{array}{*{35}{l}} {{G}_{i}}(a,b),& \text{if}~i=j,a\ne b,\\ H(i,j),& \text{if}~i\ne j,a=b,\\ {{G}_{i}}(a,a)+H(i,i),& \text{if}~i=j,a=b,\\ 0,& \text{otherwise,} \\ \end{array} \right.$ for every $i,j\in {{E}}$,and $a,b\in {{S}}$. The initial probability vector of $\{Z(t),t\ge 0\}$ is ${\rm {\bf \gamma }}=\left( {1,0,... ,0} \right)_{1\times mn} $.
Based on the partition of the state space ${{S}}$,the transition rate matrix ${{G}}$ can be partitioned as $\begin{gathered} G = \hfill \\ \left( {\begin{array}{*{20}{c}} {{G_{{W_1}{W_1}}}}&{{G_{{W_1}{F_1}}}}&{{G_{{W_1}{W_2}}}}&{{G_{{W_1}{F_2}}}}& \cdots &{{G_{{W_1}{W_m}}}}&{{G_{{W_1}{F_m}}}} \\ {{G_{{F_1}{W_1}}}}&{{G_{{F_1}{F_1}}}}&{{G_{{F_1}{W_2}}}}&{{G_{{F_1}{F_2}}}}& \cdots &{{G_{{F_1}{W_m}}}}&{{G_{{F_1}{F_m}}}} \\ {{G_{{W_2}{W_1}}}}&{{G_{{W_2}{F_1}}}}&{{G_{{W_2}{W_2}}}}&{{G_{{W_2}{F_2}}}}& \cdots &{{G_{{W_2}{W_m}}}}&{{G_{{W_2}{F_m}}}} \\ {{G_{{F_2}{W_1}}}}&{{G_{{F_2}{F_1}}}}&{{G_{{F_2}{W_2}}}}&{{G_{{F_2}{F_2}}}}& \cdots &{{G_{{F_2}{W_m}}}}&{{G_{{F_2}{F_m}}}} \\ {\quad \vdots }&{\quad \vdots }&{\quad \vdots }&{\quad \vdots }&{\; \vdots }&{\quad \vdots }&{\quad \vdots } \\ {{G_{{W_m}{W_1}}}}&{{G_{{W_m}{F_1}}}}&{{G_{{W_m}{W_2}}}}&{{G_{{W_m}{F_2}}}}& \cdots &{{G_{{W_m}{W_m}}}}&{{G_{{W_m}{F_m}}}} \\ {{G_{{F_m}{W_1}}}}&{{G_{{F_m}{F_1}}}}&{{G_{{F_m}{W_2}}}}&{{G_{{F_m}{F_2}}}}& \cdots &{{G_{{F_m}{W_m}}}}&{{G_{{F_m}{F_m}}}} \end{array}} \right) \hfill \\ \end{gathered} $
Before our discussions,some basic well-known results related to Markov processes are needed,which will be presented concisely in the following.
For the above Markov system $\{Z(t),t\ge 0\}$,its probability vector at time $t$,denoted as ${{P}}(t)=\left( {p_i (t)} \right)_{1\times mn} $,is as follows, ${{P}}(t)=\left( {p_i (t)} \right)_{1\times mn} ={\rm {\bf \gamma }}\exp ({{G}}t),$ where $p_i (t)=P\{Z(t)=i\},i\in E\times S$.
Based on the partition of ${{G}}$,then we can define a matrix as
$\begin{align}
& {{\text{P}}_{{{W}_{i}}{{W}_{i}}}}(t)=(P\{Z(t)=j,Z(u)\in \{{{e}_{i}}\}\times {{W}_{i}},\\
& u\le t|X(0)=k\}),\ \ k,j\in \{{{e}_{i}}\}\times {{W}_{i}},\\
\end{align}$
and by Colquhoun and Hawkes
A.System Reliability
The system reliability is defined as the probability that the system
is working during the time interval $[0,t]$. Thus,we assume that
the states corresponding to $\{(e_i ,j):i=1,2,$ $... ,m;j\in F_i
\}$ are absorbing states. To obtain the system reliability,we
define a new Markov process $\{Z_1 (t),t\ge 0\}$ with the state
space $E\times S$. The transition rate matrix is
${{\tilde{G}}_{1}}=\left( \begin{matrix}
{{G}_{{{W}_{1}}{{W}_{1}}}} & {{G}_{{{W}_{1}}{{F}_{1}}}} & {{G}_{{{W}_{1}}{{W}_{2}}}} & {{G}_{{{W}_{1}}{{F}_{2}}}} & \cdots & {{G}_{{{W}_{1}}{{W}_{m}}}} & {{G}_{{{W}_{1}}{{F}_{m}}}} \\
{{0}_{{{F}_{1}}{{W}_{1}}}} & {{0}_{{{F}_{1}}{{F}_{1}}}} & {{0}_{{{F}_{1}}{{W}_{2}}}} & {{0}_{{{F}_{1}}{{F}_{2}}}} & \cdots & {{0}_{{{F}_{1}}{{W}_{m}}}} & {{0}_{{{F}_{1}}{{F}_{m}}}} \\
{{G}_{{{W}_{2}}{{W}_{1}}}} & {{G}_{{{W}_{2}}{{F}_{1}}}} & {{G}_{{{W}_{2}}{{W}_{2}}}} & {{G}_{{{W}_{2}}{{F}_{2}}}} & \cdots & {{G}_{{{W}_{2}}{{W}_{m}}}} & {{G}_{{{W}_{2}}{{F}_{m}}}} \\
{{0}_{{{F}_{2}}{{W}_{1}}}} & {{0}_{{{F}_{2}}{{F}_{1}}}} & {{0}_{{{F}_{2}}{{W}_{2}}}} & {{0}_{{{F}_{2}}{{F}_{2}}}} & \cdots & {{0}_{{{F}_{2}}{{W}_{m}}}} & {{0}_{{{F}_{2}}{{F}_{m}}}} \\
\quad \vdots & \quad \vdots & \quad \vdots & \quad \vdots & ~\vdots & \quad \vdots & \quad \vdots \\
{{G}_{{{W}_{m}}{{W}_{1}}}} & {{G}_{{{W}_{m}}{{F}_{1}}}} & {{G}_{{{W}_{m}}{{W}_{2}}}} & {{G}_{{{W}_{m}}{{F}_{2}}}} & ... & {{G}_{{{W}_{m}}{{W}_{m}}}} & {{G}_{{{W}_{m}}{{F}_{m}}}} \\
{{0}_{{{F}_{m}}{{W}_{1}}}} & {{0}_{{{F}_{m}}{{F}_{1}}}} & {{0}_{{{F}_{m}}{{W}_{2}}}} & {{0}_{{{F}_{m}}{{F}_{2}}}} & ... & {{0}_{{{F}_{m}}{{W}_{m}}}} & {{0}_{{{F}_{m}}{{F}_{m}}}} \\
\end{matrix} \right),$
where 0 denotes zero matrix with appropriate dimension. Then
the system reliability is given by
$R_{\rm sys} ([0,t])=\sum\limits_{e_i \in E} {\sum\limits_{j\in W_i
} {P\{(X(t),Y(t))=(e_i ,j)\}} } .$
It is well-known that
$P\{(X(t),Y(t))=({{e}_{i}},j)\}=\gamma {{\text{e}}^{t{{{\tilde{G}}}_{1}}}}({{e}_{i}},j)$
for any $e_i \in E$ and $j\in S$.
Therefore,we have an explicit representation for the system
reliability
${{R}_{\text{sys}}}([0,t])=\sum\limits_{{{e}_{i}}\in E}{\sum\limits_{j\in {{W}_{i}}}{<\text{b}>\gamma <\text{/b}>{{\text{e}}^{t{{{\tilde{G}}}_{1}}}}({{e}_{i}},j)}}.$
In the following,we are interested in the probability that the
system operates in general time interval $[t_1 ,t_2]$ $(t_1 \le t_2
)$,it is called interval reliability in
In the following,we consider the multiple-interval reliability of the system.
Definition 1. For the above Markov system $\{Z(t),t\ge 0\}$,the multiple-interval reliability at given intervals $[a_1 ,b_1],[a_2 ,b_2],$ $... ,[a_m ,b_m]$ $(a_1 \le b_1 <a_2 \le b_2 <\cdots <a_m \le b_m )$,denoted as $R_{\rm sys} (\prod\nolimits_{i=1}^m {[a_i ,b_i]} )$,is defined as the probability of the system being at working states $W_1 ,W_2 ,... ,W_m $ and in environments $e_1 ,e_2 ,... ,e_m $ at the given multiple intervals $[a_1 ,b_1],$ $[a_2 ,b_2],... ,[a_m ,b_m]$,respectively,i.e., $\begin{align} & {{R}_{\text{sys}}}\left( \prod\limits_{i=1}^{m}{[{{a}_{i}},{{b}_{i}}]} \right)=P\{(X(u),Y(u))\in \{{{e}_{i}}\}\times {{W}_{i}}\text{,} \\ & \forall u\in [{{a}_{i}},{{b}_{i}}],i=1,2,...,m\}. \\ \end{align}$
Theorem 1. For the above Markov system $\{Z(t),t\ge 0\}$,the multiple-interval reliability is $\begin{align} & {{R}_{\text{sys}}}\left( \prod\limits_{i=1}^{m}{[{{a}_{i}},{{b}_{i}}]} \right)=\gamma \prod\limits_{i=1}^{m-1}{[\exp (G({{a}_{i}}-{{b}_{i-1}}))} \\ & \ \ \times {{\Delta }_{i}}\exp ({{G}_{{{W}_{i}}{{W}_{i}}}}({{b}_{i}}-{{a}_{i}})){{\Omega }_{i}}]\ \ \\ & \times \exp (G({{a}_{m}}-{{b}_{m-1}})){{\Delta }_{m}}\exp ({{G}_{{{W}_{m}}{{W}_{m}}}}({{b}_{m}}-{{a}_{m}})){{\text{1}}_{{{n}_{m}}}},\\ \end{align}$ where ${{\Delta }_{1}}=\left( \begin{matrix} {{I}_{{{n}_{1}}{{n}_{1}}}} \\ {{0}_{(n-{{n}_{1}}){{n}_{1}}}} \\ {{0}_{{{n}_{2}}{{n}_{1}}}} \\ {{0}_{(n-{{n}_{2}}){{n}_{1}}}} \\ \quad ~~\vdots \\ {{0}_{{{n}_{m}}{{n}_{1}}}} \\ {{0}_{(n-{{n}_{m}}){{n}_{1}}}} \\ \end{matrix} \right),\ \ {{\Delta }_{2}}=\left( \begin{matrix} {{0}_{{{n}_{1}}{{n}_{2}}}} \\ {{0}_{(n-{{n}_{1}}){{n}_{2}}}} \\ {{I}_{{{n}_{2}}{{n}_{2}}}} \\ {{0}_{(n-{{n}_{2}}){{n}_{2}}}} \\ \quad ~~\vdots \\ {{0}_{{{n}_{m}}{{n}_{2}}}} \\ {{0}_{(n-{{n}_{m}}){{n}_{2}}}} \\ \end{matrix} \right),$ $...,\ \ {{\Delta }_{m}}=\left( \begin{matrix} {{0}_{{{n}_{1}}{{n}_{m}}}} \\ {{0}_{(n-{{n}_{1}}){{n}_{m}}}} \\ {{0}_{{{n}_{2}}{{n}_{2}}}} \\ {{0}_{(n-{{n}_{2}}){{n}_{m}}}} \\ \quad ~~\vdots \\ {{I}_{{{n}_{m}}{{n}_{m}}}} \\ {{0}_{(n-{{n}_{m}}){{n}_{m}}}} \\ \end{matrix} \right),$ $\begin{align} & {{\Omega }_{1}}=({{I}_{{{n}_{1}}{{n}_{1}}}},{{0}_{{{n}_{1}}(n-{{n}_{1}})}},{{0}_{{{n}_{1}}{{n}_{2}}}},{{0}_{{{n}_{1}}(n-{{n}_{2}})}},...,\\ & \qquad \ \ {{0}_{{{n}_{1}}{{n}_{m-1}}}},{{0}_{{{n}_{1}}(n-{{n}_{m-1}})}},{{0}_{{{n}_{1}}{{n}_{m}}}},{{0}_{{{n}_{1}}(n-{{n}_{m}})}}),\\ & {{\Omega }_{2}}=({{0}_{{{n}_{2}}{{n}_{1}}}},{{0}_{{{n}_{2}}(n-{{n}_{1}})}},{{I}_{{{n}_{2}}{{n}_{2}}}},{{0}_{{{n}_{2}}(n-{{n}_{2}})}},...,\\ & \qquad \ \ {{0}_{{{n}_{2}}{{n}_{m-1}}}},{{0}_{{{n}_{2}}(n-{{n}_{m-1}})}},{{0}_{{{n}_{2}}{{n}_{m}}}},{{0}_{{{n}_{2}}(n-{{n}_{m}})}}),\\ & {{\Omega }_{m-1}}=({{0}_{{{n}_{m-1}}{{n}_{1}}}},{{0}_{{{n}_{m-1}}(n-{{n}_{1}})}},{{0}_{{{n}_{m-1}}{{n}_{2}}}},{{0}_{{{n}_{m-1}}(n-{{n}_{2}})}},...,\\ & \qquad \ \ {{I}_{{{n}_{m-1}}{{n}_{m-1}}}},{{0}_{{{n}_{m-1}}(n-{{n}_{m-1}})}},{{0}_{{{n}_{m-1}}{{n}_{m}}}},{{0}_{{{n}_{m-1}}(n-{{n}_{m}})}}),\\ \end{align}$ $b_0 =0$,and ${{1}}_{n_m } $ is a column vector of $n_m $ ones.
Proof. Since $\exp ({{G}}(a_i -b_{i-1} ))\Delta _i \exp ({{G}}_{W_i W_i } (b_i -a_i ))$ is the transition probability vector from time $a_i -b_{i-1} $ to time $b_i -b_{i-1} $, $i=1,2,... ,m$,and the system sojourns in the working states during all interval times $[a_i -b_{i-1} ,b_i -b_{i-1}]$ (because of the time homogeneity),and the function of matrix $\Delta _i $ is to keep the system starting from the working states of $\{e_i \}\times W_i $,the role of matrix ${{\Omega }}_i $ is to change matrix dimension $1\times n_i $ into $1\times mn$,and the column vector ${{1}}_{n_m } $ is used to sum up all possible probabilities that satisfies the requirements.
B.Environment Reliability
The system operates in the environment set $E$. We assume that some environments are fatal to the system,i.e.,the system does not operate when it is in these environments. Let $\begin{align} & NA=\{{{e}_{k+1}},{{e}_{k+2}},...,{{e}_{m}}\} \\ & {{{\tilde{G}}}_{2}}=\left( \begin{matrix} {{G}_{{{W}_{1}}{{W}_{1}}}} & {{G}_{{{W}_{1}}{{F}_{1}}}} & {{G}_{{{W}_{1}}{{W}_{2}}}} & {{G}_{{{W}_{1}}{{F}_{2}}}} & \cdots & {{G}_{{{W}_{1}}{{W}_{k}}}} & {{G}_{{{W}_{1}}{{F}_{k}}}} \\ {{G}_{{{F}_{1}}{{W}_{1}}}} & {{G}_{{{F}_{1}}{{F}_{1}}}} & {{G}_{{{F}_{1}}{{W}_{2}}}} & {{G}_{{{F}_{1}}{{F}_{2}}}} & \cdots & {{G}_{{{F}_{1}}{{W}_{k}}}} & {{G}_{{{F}_{1}}{{F}_{k}}}} \\ {{G}_{{{W}_{2}}{{W}_{1}}}} & {{G}_{{{W}_{2}}{{F}_{1}}}} & {{G}_{{{W}_{2}}{{W}_{2}}}} & {{G}_{{{W}_{2}}{{F}_{2}}}} & \cdots & {{G}_{{{W}_{2}}{{W}_{k}}}} & {{G}_{{{W}_{2}}{{F}_{k}}}} \\ {{G}_{{{F}_{2}}{{W}_{1}}}} & {{G}_{{{F}_{2}}{{F}_{1}}}} & {{G}_{{{F}_{2}}{{W}_{2}}}} & {{G}_{{{F}_{2}}{{F}_{2}}}} & \cdots & {{G}_{{{F}_{2}}{{W}_{k}}}} & {{G}_{{{F}_{2}}{{F}_{k}}}} \\ \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots \\ {{G}_{{{W}_{k}}{{W}_{1}}}} & {{G}_{{{W}_{k}}{{F}_{1}}}} & {{G}_{{{W}_{k}}{{W}_{2}}}} & {{G}_{{{W}_{k}}{{F}_{2}}}} & \cdots & {{G}_{{{W}_{k}}{{W}_{k}}}} & {{G}_{{{W}_{k}}{{F}_{k}}}} \\ {{G}_{{{F}_{k}}{{W}_{1}}}} & {{G}_{{{F}_{k}}{{F}_{1}}}} & {{G}_{{{F}_{k}}{{W}_{2}}}} & {{G}_{{{F}_{k}}{{F}_{2}}}} & \cdots & {{G}_{{{F}_{k}}{{W}_{k}}}} & {{G}_{{{F}_{k}}{{F}_{k}}}} \\ \end{matrix} \right) \\ \end{align}$
Without loss of generality,we assume that the environment set $NA$ is unacceptable to the system. The system failure states are not concerned in this situation. The subscript $F$ is still retained in order to facilitate discussion. Thus,the environment reliability is given by ${{R}_{\text{env}}}([0,t])={{\gamma }_{2}}\exp (t{{\tilde{G}}_{2}}){{\text{1}}_{kn}},$ where ${\rm {\bf \gamma }}_2 =(1,0,... ,0)_{1\times kn} $.
In the following,when both the system failure states and fatal environment states are jointly concerned,we formulate the reliability of the system. We suppose that the environment set $NA$ is unacceptable to the system,and the system failure states are the same as in Section III-A. Let ${{\tilde{G}}_{3}}=\left( \begin{matrix} {{G}_{{{W}_{1}}{{W}_{1}}}} & {{G}_{{{W}_{1}}{{F}_{1}}}} & {{G}_{{{W}_{1}}{{W}_{2}}}} & {{G}_{{{W}_{1}}{{F}_{2}}}} & ... & {{G}_{{{W}_{1}}{{W}_{k}}}} & {{G}_{{{W}_{1}}{{F}_{k}}}} & 0 \\ {{0}_{{{F}_{1}}{{W}_{1}}}} & {{0}_{{{F}_{1}}{{F}_{1}}}} & {{0}_{{{F}_{1}}{{W}_{2}}}} & {{0}_{{{F}_{1}}{{F}_{2}}}} & ... & {{0}_{{{F}_{1}}{{W}_{k}}}} & {{0}_{{{F}_{1}}{{F}_{k}}}} & 0 \\ {{G}_{{{W}_{2}}{{W}_{1}}}} & {{G}_{{{W}_{2}}{{F}_{1}}}} & {{G}_{{{W}_{2}}{{W}_{2}}}} & {{G}_{{{W}_{2}}{{F}_{2}}}} & ... & {{G}_{{{W}_{2}}{{W}_{k}}}} & {{G}_{{{W}_{2}}{{F}_{k}}}} & 0 \\ {{0}_{{{F}_{2}}{{W}_{1}}}} & {{0}_{{{F}_{2}}{{F}_{1}}}} & {{0}_{{{F}_{2}}{{W}_{2}}}} & {{0}_{{{F}_{2}}{{F}_{2}}}} & ... & {{0}_{{{F}_{2}}{{W}_{k}}}} & {{0}_{{{F}_{2}}{{F}_{k}}}} & 0 \\ \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots & \vdots \\ {{G}_{{{W}_{k}}{{W}_{1}}}} & {{G}_{{{W}_{k}}{{F}_{1}}}} & {{G}_{{{W}_{k}}{{W}_{2}}}} & {{G}_{{{W}_{k}}{{F}_{2}}}} & ... & {{G}_{{{W}_{k}}{{W}_{k}}}} & {{G}_{{{W}_{k}}{{F}_{k}}}} & 0 \\ {{0}_{{{F}_{k}}{{W}_{1}}}} & {{0}_{{{F}_{k}}{{F}_{1}}}} & {{0}_{{{F}_{k}}{{W}_{2}}}} & {{0}_{{{F}_{k}}{{F}_{2}}}} & ... & {{0}_{{{F}_{k}}{{W}_{k}}}} & {{0}_{{{F}_{k}}{{F}_{k}}}} & 0 \\ 0 & 0 & 0 & 0 & ... & 0 & 0 & 0 \\ \end{matrix} \right),$ where ${\rm { 0}}$ denotes zero matrixes with appropriate dimension. Then the system reliability is given by $\begin{align} & {{{{R}'}}_{\text{sys}}}([0,t])=\sum\limits_{{{e}_{i}}\in \{{{e}_{1}},{{e}_{2}},...,{{e}_{m}}\}}{\sum\limits_{j\in {{W}_{i}}}{P\{(X(t),Y(t))=({{e}_{i}},j)\}}}\qquad = \\ & \sum\limits_{{{e}_{i}}\in \{{{e}_{1}},{{e}_{2}},...,{{e}_{m}}\}}{\sum\limits_{j\in {{W}_{i}}}{<\text{b}>\gamma <\text{/b}>{{\text{e}}^{t{{{\tilde{G}}}_{3}}}}({{e}_{i}},j)}}. \\ \end{align}$
Ⅳ. Availability A.System AvailabilityAvailability is another important reliability index. One may be interested in the probability that the system is operating at time $t$. Therefore,the system availability is given by $\begin{align} & {{A}_{\text{sys}}}(t)=P\{\text{thesystemisoperatingattime}t\quad \ = \\ & P\{(X(t),Y(t))\in \bigcup\limits_{i=1}^{m}{(\{{{e}_{i}}\}\times {{W}_{i}})}\}\quad \ = \\ & \gamma \exp (Gt){{\left( 1_{{{n}_{1}}}^{\text{T}}~0_{n-{{n}_{1}}}^{\text{T}}~1_{{{n}_{2}}}^{\text{T}}~0_{n-{{n}_{2}}}^{\text{T}}~...~1_{{{n}_{m}}}^{\text{T}}~0_{n-{{n}_{m}}}^{\text{T}} \right)}^{\text{T}}},\\ \end{align}$ where ${\rm {1}}$ is a column vector with all elements equal to 1 and ${\rm {0}}$ is a column vector with all elements equal to 0.
In the following,we consider the multiple-point availability of the system.
Definition 2. For the above Markov system $\{Z(t),t\ge 0\}$,the multiple-point availability at given points $t_1 <t_2 <\cdots <t_m $,denoted as $A_{\rm sys} (t_1 ,t_2 ,... ,t_m )$,is defined as the probability of the system being at working states $W_1 ,W_2 ,... ,W_m $ and in environments $e_1 ,e_2 ,... ,e_m $ at the given multiple points $t_1 ,$ $t_2 ,$ $... ,$ $t_n $, respectively,i.e., $\begin{align} & {{A}_{\text{sys}}}({{t}_{1}},{{t}_{2}},...,{{t}_{m}})\qquad = \\ & P\{(X({{t}_{i}}),Y({{t}_{i}}))\in \{{{e}_{i}}\}\times {{W}_{i}},\ i=1,2,...,m\}. \\ \end{align}$
Theorem 2. For the above Markov system $\{Z(t),t\ge 0\}$,the multiple-point availability is $\begin{align} & {{A}_{\text{sys}}}({{t}_{1}},{{t}_{2}},...,{{t}_{m}})=\gamma \exp (G{{t}_{1}}){{E}_{1}}\exp (G({{t}_{2}}-{{t}_{1}})) \\ & {{E}_{2}}\qquad \times \cdots \times {{E}_{m-1}}\exp (G({{t}_{m}}-{{t}_{m-1}})){{E}_{m}},\\ \end{align}$ where $\begin{align} & {{E}_{1}}=\left( \begin{matrix} {{I}_{{{n}_{1}}\times {{n}_{1}}}} & {{0}_{{{n}_{1}}\times (mn-{{n}_{1}})}} \\ [1mm]{{0}_{(mn-{{n}_{1}})\times {{n}_{1}}}} & {{0}_{(mn-{{n}_{1}})\times (mn-{{n}_{1}})}} \\ \end{matrix} \right),\\ & {{E}_{2}}=\left( \begin{matrix} {{0}_{n\times n}} & {{0}_{n\times {{n}_{2}}}} & {{0}_{n\times ((m-1)n-{{n}_{2}})}} \\ [1mm]{{0}_{{{n}_{2}}\times n}} & {{I}_{{{n}_{2}}\times {{n}_{2}}}} & {{0}_{{{n}_{2}}\times ((m-1)n-{{n}_{2}})}} \\ [1mm]{{0}_{((m-1)n-{{n}_{2}})\times n}} & {{0}_{((n-1)m-{{n}_{2}})\times {{n}_{2}}}} & {{0}_{((m-1)n-{{n}_{2}})\times ((m-1)n-{{n}_{2}})}} \\ \end{matrix} \right),\\ \end{align}$ $\begin{align} & {{E}_{m-1}}=\left( \begin{matrix} {{0}_{(m-2)n\times (m-2)n}} & {{0}_{(m-2)n\times {{n}_{m-1}}}} & {{0}_{(m-2)n\times (2n-{{n}_{m-1}})}} \\ [1mm]{{0}_{{{n}_{m-1}}\times (m-2)n}} & {{I}_{{{n}_{m-1}}\times {{n}_{m-1}}}} & {{0}_{{{n}_{m-1}}\times (2n-{{n}_{m-1}})}} \\ [1mm]{{0}_{(2n-{{n}_{m-1}})\times (m-2)n}} & {{0}_{(2n-{{n}_{m-1}})\times {{n}_{m-1}}}} & {{0}_{(2n-{{n}_{m-1}})\times (2n-{{n}_{m-1}})}} \\ \end{matrix} \right),\\ & {{E}_{m}}=\left( \begin{array}{*{35}{l}} {{0}_{(m-1)n\times 1}} \\ [1mm]{{I}_{{{n}_{m}}\times 1}} \\ [1mm]{{0}_{(n-{{n}_{m}})\times 1}} \\ \end{array} \right),\\ \end{align}$ ${ { I}}$ is a unit matrix with appropriate dimension, ${\rm {0}}$ is a zero matrix with appropriate dimension.
Proof. Because of time homogeneity,${{\gamma }}\exp ({{G}}t_1 )$ is a probability vector which gives the probability of the system being at each state and at instant time $t_1 $,and $\exp ({{G}}(t_i -t_{i-1} ))$ $(i$ $=$ $2,3,... ,m)$,is the transition probabilities from time $t=0$ to time $t=t_i -t_{i-1} $. The function of matrix ${{E}}_i $ $(i=1,2,$ $... ,$ $m-1)$ is to keep the system starting from the working states of $\{e_i \}\times W_i $ and the role of matrix ${{E}}_m $ is to sum up all possible working probabilities. The product operations are used among the terms because of conditional independence.
B.Environment AvailabilityBecause the environment $e_i$ $(e_i \in NA)$ is unacceptable to the system,the environment availability of the system is given by $\begin{align} & {{A}_{\text{env}}}(t)=\ P\{(X(t),Y(t))\in \bigcup\limits_{i=1}^{k}{(\{{{e}_{i}}\}\times {{W}_{i}})}\} \\ & =\gamma \exp (Gt)\left( 1_{{{n}_{1}}}^{\text{T}}~~0_{n-{{n}_{1}}}^{\text{T}}~~1_{{{n}_{2}}}^{\text{T}}~~0_{n-{{n}_{2}}}^{\text{T}} \right.\ \\ & ...~~1_{{{n}_{k}}}^{\text{T}}~~0_{n-{{n}_{k}}}^{\text{T}}~~0_{{{n}_{k+1}}}^{\text{T}}~~0_{n-{{n}_{k+1}}}^{\text{T}}\ \\ & {{\left. ...~~0_{{{n}_{m}}}^{\text{T}}~~0_{n-{{n}_{m}}}^{\text{T}} \right)}^{\text{T}}}. \\ \end{align}$
Ⅴ. A numerical exampleIn this section,an engineering example is presented to illustrate the results obtained in the previous sections.
The air-condition system is essential to us in some places, such as,Hainan province,Guangdong province,Beijing,Shanghai and so on. We suppose that an air-condition system operating in the environment process $\{X(t),t\ge 0\}$,and it has a state space $E=\{e_1 ,e_2 ,e_3 \}$. The states $e_1 $,$e_2 $,and $e_3 $ can denote spring,summer,and autumn,respectively. The transition rate matrix is ${{H}}=\left( {{\begin{array}{*{20}r} {-2} & 2 & 0 \\ 0 & {-1} & 1 \\ 1 & 0 & {-1} \\ \end{array} }} \right).$ When the system is in the environment $e_1 $,the deterioration level of the system is $S=\{1,2\}=W_1 $,and the transition rate matrix is ${{G}}_1 =\left( {{\begin{array}{*{20}r} {-3} & 3 \\ 1 & {-1} \\ \end{array} }} \right).$ When the system is in the environment $e_2 $,the deterioration level of the system is $S=\{1\}\cup \{2\}=W_2 \cup F_2 $,and the transition rate matrix is ${{G}}_2 =\left( {{\begin{array}{*{20}r} {-1} & 1 \\ 2 & {-2} \\ \end{array} }} \right).$ When the system is in the environment $e_3 $,the deterioration level of the system is $S=\{1,2\}=F_3 $,and the transition rate matrix is ${{G}}_3 =\left( {{\begin{array}{*{20}r} {-2} & 2 \\ 1 & {-1} \\ \end{array} }} \right).$ It is obvious that the environment $e_3 $ is unacceptable to the system,so the system reliability and the system availability are equal to the environment reliability and the environment availability,respectively. Therefore,we consider only the system reliability indexes in the following.
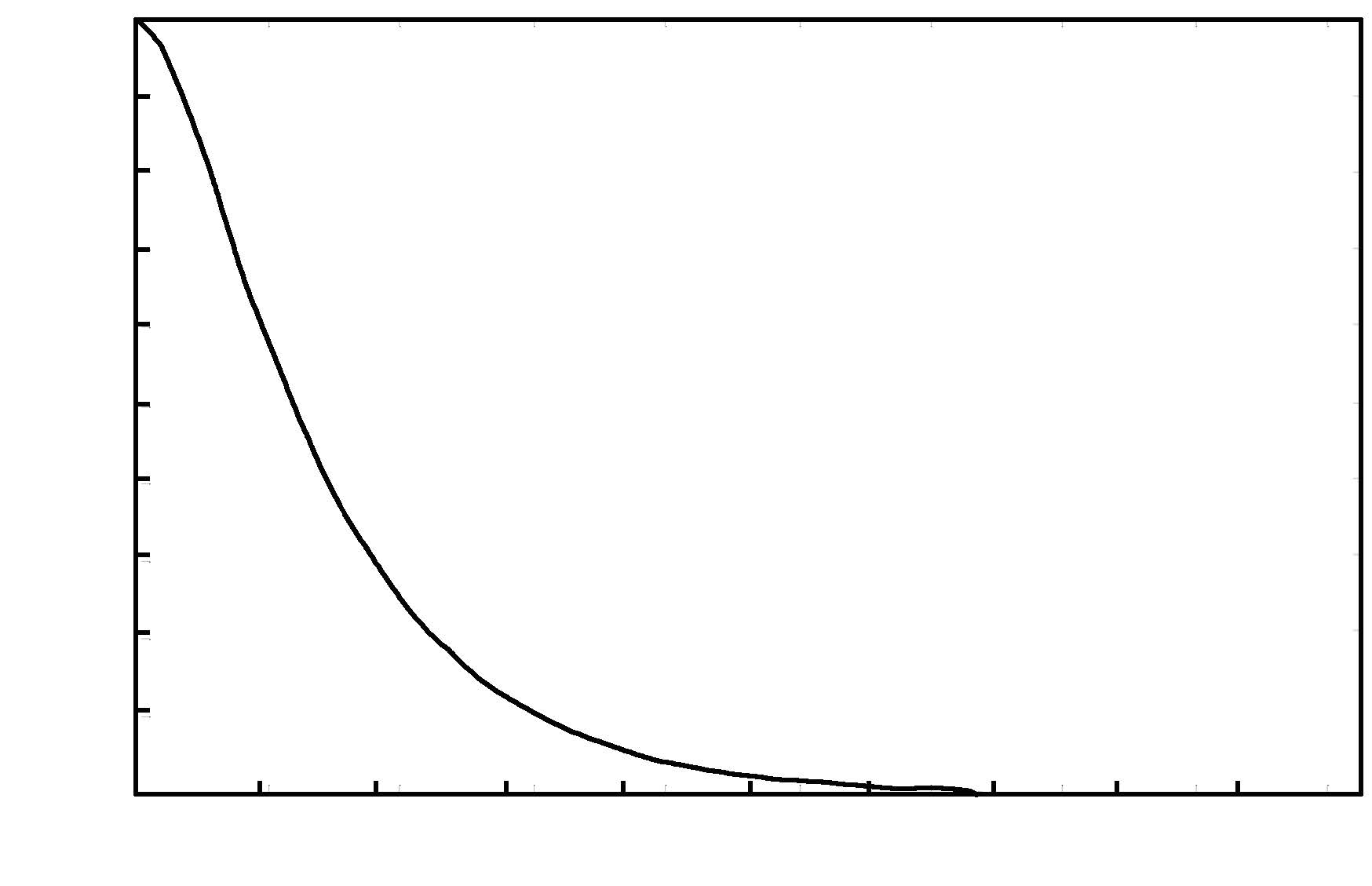
Thus,the bivariate process $\{Z(t),t\ge 0\}=\{( X(t),Y(t)),$ $t$ $\ge$ $0\}$ has state space $E\times S=\{(e_1 ,1),(e_1 ,2),(e_2 ,1),(e_2 ,2),(e_3 ,1),(e_3 ,2)\}.$ The initial probability vector is ${\rm {\bf \gamma }}=\left( {1,0,0,0,0,0} \right)$. By using Matlab software, we can get the curve of the system reliability $R_{\rm sys} ([0,t])$,which is shown in Fig.1.

|
Download:
|
| Fig. 1. The curve of the system reliability $R_{\rm sys} ([0,t])$. | |
{kind=link}
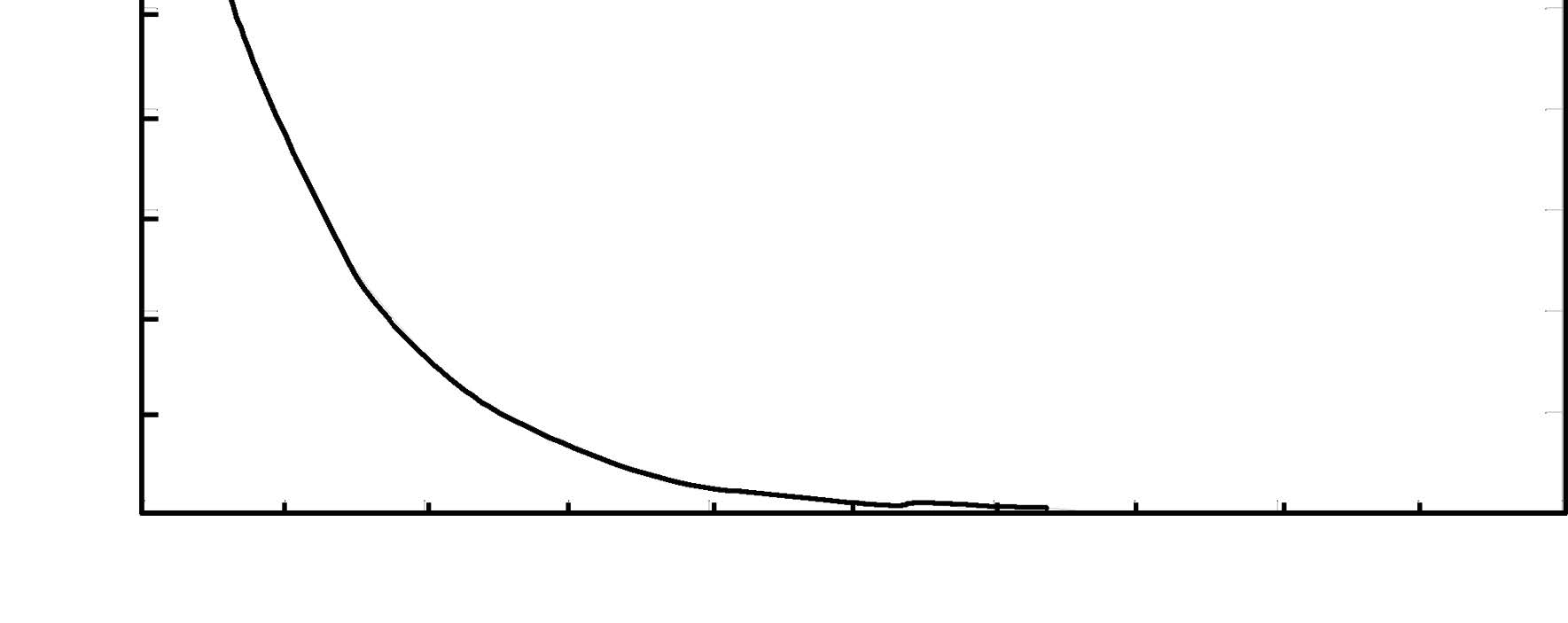
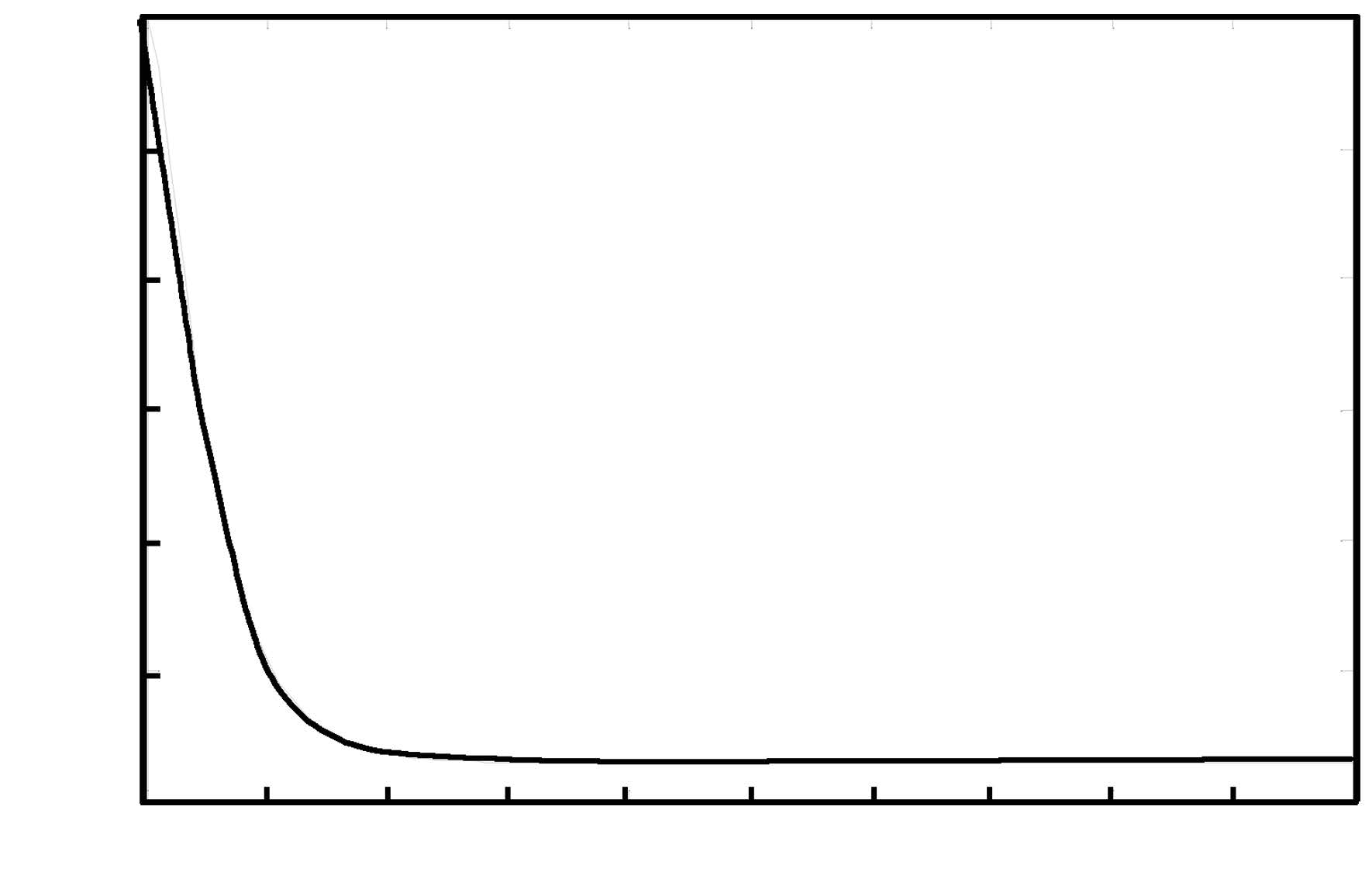
If the value of $a$ is given (denoted as $a=0.3)$,then the interval reliability $R_{\rm sys} ([0.3,b])$ is a function of $b$. Fig.2 is the curve of the system interval reliability $R_{\rm sys} ([0.3,b])$ as $b$ varies. So we have $R_{\rm sys} ([0.3,0.4],[0.9,1])=0.0879.$ Similarly,we can get the curve of the system availability shown in Fig.3. And we obtained that $A_{\rm sys} (0.3,0.5)=0.2554$.

|
Download:
|
| Fig. 2. The curve of the system interval reliability $R_{\rm sys} ([0.3,b])$ as $b$ varies. | |
{kind=link}

|
Download:
|
| Fig. 3. The curve of the system interval reliability The curve of the system availability $A_{\rm sys} (t)$. | |
{kind=link}
In this paper,the system which operates in multiple environments is studied. It is more general than the single environment studied in previous papers. A combined,bivariate stochastic process is constructed to represent the evolution of the system. Interesting reliability indexes are obtained by using aggregated stochastic process theory and matrix partition method. Especially,multiple-interval reliability and multiple-point availability are not covered by traditional reliabilities. A numerical example is also given to illustrate the results obtained in this paper. In future study,the temporally non-homogeneous continuous-time Markov chain environment system and the temporally homogeneous semi-Markov process environment system may be considered instead of the Markov environment system. Various performance measures are now conceivable; for example: system reliability,environment reliability,system multiple-interval reliability,system availability,environment availability, system-multiple point availability etc.
| [1] | Barlow R E, Proschan F. Mathematical Theory of Reliability. New York:Wiley, 1965. |
| [2] | Colquhoun D, Hawkes A G. On the stochastic properties of bursts of single Ion-channel openings and of clusters of bursts. Philosophical Transactions of the Royal Society of London, Series B:Biological Sciences, 1982, 300(1098):1-59 |
| [3] | Zheng Z H, Cui L R, Hawkes A G. A study on a single-unit Markov repairable system with repair time omission. IEEE Transactions on Reliability, 2006, 55(2):182-188 |
| [4] | Cui L R, Li H J, Li J L. Markov repairable systems with historydependent up and down states. Stochastic Models, 2007, 23(4):665-681 |
| [5] | Wang L Y, Cui L R. Aggregated semi-Markov repairable systems with history-dependent up and down states. Mathematical and Computer Modeling, 2011, 53(5-6):883-895 |
| [6] | Liu B L, Cui L R, Wen Y Q, Shen J Y. A performance measure for Markov system with stochastic supply patterns and stochastic demand patterns. Reliability Engineering and System Safety, 2013, 119:294-299 |
| [7] | Cui L R, Du S J, Hawkes A G. A study on a single-unit repairable system with state aggregations. IIE Transactions, 2012, 44(11) 1022-1032 |
| [8] | Liu B L, Cui L R, Wen Y Q. Interval reliability for aggregated Markov repairable system with repair time omission. Annals of Operations Research, 2014, 212(1):169-183 |
| [9] | Hawkes A G, Cui L R, Zheng Z H. Modeling the evolution of system reliability performance under alternative environments. IIE Transactions, 2011, 43(11):761-772 |
| [10] | Wang L Y, Cui L R, Yu M L. Markov repairable systems with stochastic regimes switching. Journal of Systems Engineering and Electronics, 2011, 22(5):773-779 |
| [11] | Cui L R, Du S J, Liu B L. Multi-point and multi-interval availabilities. IEEE Transactions on Reliability, 2013, 62(4):811-820 |
| [12] | Liu H T, Meng X Y. A warm standby system with repair of non-new and repairman vacation. Acta Automatica Sinica, 2012, 38(4):639-646 |
| [13] | Montoro-Cazorla D, Pérez-Ocón R, Segovia M D C. Replacement policy in a system under shocks following a Markovian arrival process. Reliability Engineering and System Safety, 2009, 94(2):497-502 |
| [14] | Montoro-Cazorla D, Pérez-Ocón R. Two shock and wear systems under repair standing a finite number of shocks. European Journal of Operational Research, 2011, 214(2):298-307 |
| [15] | Montoro-Cazorla D, Pérez-Ocón R. Shock and wear degradating systems under three types of repair. Applied Mathematics and Computation, 2012, 218(24):11727-11737 |
| [16] | Lim T J. A stochastic regime switching model for the failure process of a repairable system. Reliability Engineering and System Safety, 1998, 59(2):225-238 |
| [17] | Ravishanker N, Liu Z H, Ray B K. NHPP model with Markov switching for software reliability. Computational Statistics and Data Analysis, 2008, 52(8):3988-3999 |
| [18] | Kharoufeh J P. Explicit results for wear processes in a Markovian environment. Operations Research Letters, 2003, 31(3):237-244 |
| [19] | Kharoufeh J P, Cox S M, Oxley M E. Reliability of manufacturing equipment in complex environments. Annuals of Operation Research, 2013, 209(1):231-254 |
| [20] | Çekyay B, Ö zekici S. Performance measures for systems with Markovian missions and aging. IEEE Transactions on Reliability, 2012, 61(3):769-778 |