 2016, Vol.3
2016, Vol.3 



In our daily lives,it is seen that a given task
could be accomplished successfully if one could repeat the process
for several times. In this case,one could learn important
information from the past experiences and make an improvement in
his/her current behavior. This intuitive cognition motivates the
idea of iterative learning control (ILC),which was first proposed
in
To have more flexibility and tolerance,more and more systems are
built following the networked control system scheme,where the
plant and the controller are usually located at different sites
and communicate with each other through wired/wireless networks.
Due to the limitation of transmission bandwidth,the data burden
is an important topic,while quantization of the actual signal
before transmitting is a fair choice for many practical
applications. Some previous studies are given in
Bu and co-workers made the first attempt on quantized ILC problem
in
Here,the stochastic systems are taken into account. In this case,both stochastic noises from systems and quantization error are mixed and thus it is interesting whether a good performance could be achieved by ILC based on quantized information. To be specific,in this paper,we consider both linear and nonlinear stochastic systems and provide ILC update laws based on quantized error. In order to deal with the stochastic noises,a decreasing learning gain sequence is introduced to the update laws. As a result,it is proved that the input sequence would converge to the desired optimal input almost surely. That is,by minor modifications,ILC could behave well under both stochastic noises and quantization errors.
The rest of the paper is arranged as follows: Section Ⅱ gives the problem formulation and ILC law for stochastic linear systems; Section Ⅲ gives the detailed analysis of the convergence; Extension to nonlinear case is provided in Section Ⅳ; Ⅰ llustrative simulations are shown in Section Ⅴ; and Section ⅥI concludes the paper.
Ⅱ. Problem FormulationConsider the following linear discrete-time stochastic systems:
| $\begin{gathered} {x_k}(t + 1) = A(t){x_k}(t) + B(t){u_k}(t) + {w_k}(t + 1),\hfill \\ {y_k}(t) = C(t){x_k}(t) + {v_k}(t),\hfill \\ \end{gathered}$ | (1) |
The reference is denoted by $y_d(t)$,$t=\{0,1,...,N\}$. Then the tracking error is given by $e_k(t)=y_d(t)-y_k(t)$.
Let ${F_k}: = \sigma \{ {y_j}(t),{x_j}(t),{w_j}(t),{v_j}(t),0 \leqslant j \leqslant k,t \in \{ 0,...,N\} \} $ be the $\sigma$-algebra generated by $y_j(t)$,$x_j(t)$,$w_j(t)$,$v_j(t)$,$0\leq t\leq N$,$0\leq j\leq k$. Then the set of admissible controls is defined as $U = \{ {u_{k + 1}}(t) \in {F_k},\mathop {\sup }\limits_k {u_k}(t) < \infty ,{\text{a}}{\text{.s}}{\text{.}},t \in \{ 0,...,N - 1\} ,k = 0,1,2,...\} .$ From the definition of the set $U$,it is noticed that there are two requirements on the admissible control sequence $\{u_k(t), k=0,1,2,...\}$. One is that the input sequence should be bounded in the almost sure sense. The other one is that $u_{k+1}(t)$ should be ${F_k}$-measurable,i.e.,the input $u_{k+1}(t)$ could be expressed by the information in ${F_k}$ which is a basic requirement of ILC. Thus the set $U$ is compact.
The control objective is to find an input sequence $\{u_k(t),k=0,1,2,...\}\subset U$ to minimize the following averaged tracking errors,$\forall t\in\{0,1,...,N\}$
| $V(t) = \mathop {\lim \sup }\limits_{n \to \infty } \frac{1}{n}\sum\limits_{k = 1}^n {{y_d}(} t) - {y_k}(t){^2}.$ | (2) |
For further analysis,the following assumptions are needed.
A1. The real number $C(t+1)B(t)$ coupling the input and output is an unknown nonzero constant,but its sign, characterizing the control direction,is assumed known. Without loss of any generality,it is assumed that $C(t+1)B(t)>0$ in the rest of the paper.
Remark 1. It is noted that $C(t+1)B(t)\neq 0$ is equivalent to claiming that the input/output relative degree is one. In the followings,without causing confusion,the symbol $C(t+1)B(t)$ will be abbreviated as $C^+B(t)$ for simplicity of writing.
Under A1 and the system (1),it is noted there exist suitable initial state value $x_d(0)$ and input $u_d(t)$ such that
| $\begin{array}{*{20}{l}} {}&{{x_d}(t + 1) = A(t){x_d}(t) + B(t){u_d}(t),} \\ {}&{{y_d}(t) = C(t){x_d}(t).} \end{array}$ | (3) |
As a matter of fact,by A1,the following is a recursive solution to (3) with initial state $x_d(0)$, ${u_d}(t) = {({C^ + }B(t))^{ - 1}}({y_d}(t + 1) - C(t + 1)A(t){x_d}(t)).$
We formulate this fact into the following assumption.
A2. The reference $y_d(t)$ is realizable,i.e.,there is a unique input $u_d(t)$ such that
| $\begin{gathered} {x_d}(t + 1) = A{x_d}(t) + B{u_d}(t),\hfill \\ {y_d}(t) = C{x_d}(t),\hfill \\ \end{gathered}$ | (4) |
A3. For each $t$ the independent and identically distributed (IID) sequence $\{w_k(t),k=0,1,...\}$ is independent of the IID sequence $\{v_k(t),k=0,1,...\}$ with ${\rm E}w_k(t)=0$,${\rm E}v_k(t)=0$,$\sup_k{\rm E}w_k^2(t)<\infty$,$\sup_k{\rm E}v_k^2(t)<\infty$, $\lim_{n\rightarrow\infty}\frac{1}{n}\sum_{k=1}^nw_k^2(t)=R_w^t$, and $\lim_{n\rightarrow\infty}\frac{1}{n}\sum_{k=1}^nv_k^2(t)=R_v^t$, almost surely (a.s.),where $R_w^t$ and $R_v^t$ are unknown.
Note that the noise assumption is made according to the iteration axis rather than the time axis,thus this requirement is not rigorous as the process would be performed repeatedly.
A4. The sequence of initial values $\{x_k(0)\}$ is IID with ${\rm E}x_k(0)=x_d(0)$,$\sup_k{\rm E}x_k^2(0)<\infty$,and $\lim_{n\rightarrow\infty}\frac{1}{n}\sum_{k=1}^nx_k^2(0)=R^0_x$. Further,the sequences $\{x_k(0),k=0,1,...\}$, $\{w_k(t),k=0,1,...\}$,and $\{v_k(t),k=0,1,...\}$ are mutually independent.
To facilitate the expression,denote $w_k(0)=x_k(0)-x_d(0)$. Then it is easy to define $\lim_{n\rightarrow\infty}\frac{1}{n}\sum_{k=1}^nw_k^2(0)=R_w^0$ to satisfy the formulation of A3. In other words,A4 can be compressed into A3.
Lemma 1. Consider the stochastic system (1) and tracking objective $y_d(t+1)$,and assume A1-A4 hold,then for any arbitrary time $t+1$,the index (2) will be minimized if the control sequence $\{u_k(t)\}$ is admissible and satisfies $u_k(i)\xrightarrow[k\rightarrow\infty]{}u_d(i)$, $i=0,1,...,t$. In this case,$\{u_k(t)\}$ is called the optimal control sequence.
The proof is given in Appendix A.
Ⅲ. ILC Design and its Convergence ResultsIn traditional ILC,the tracking error $e_k(t)$ is transmitted back for updating the input signal. In other words,the update law for input is
| ${u_{k + 1}}(t) = {u_k}(t) + {a_k}{e_k}(t + 1),$ | (5) |
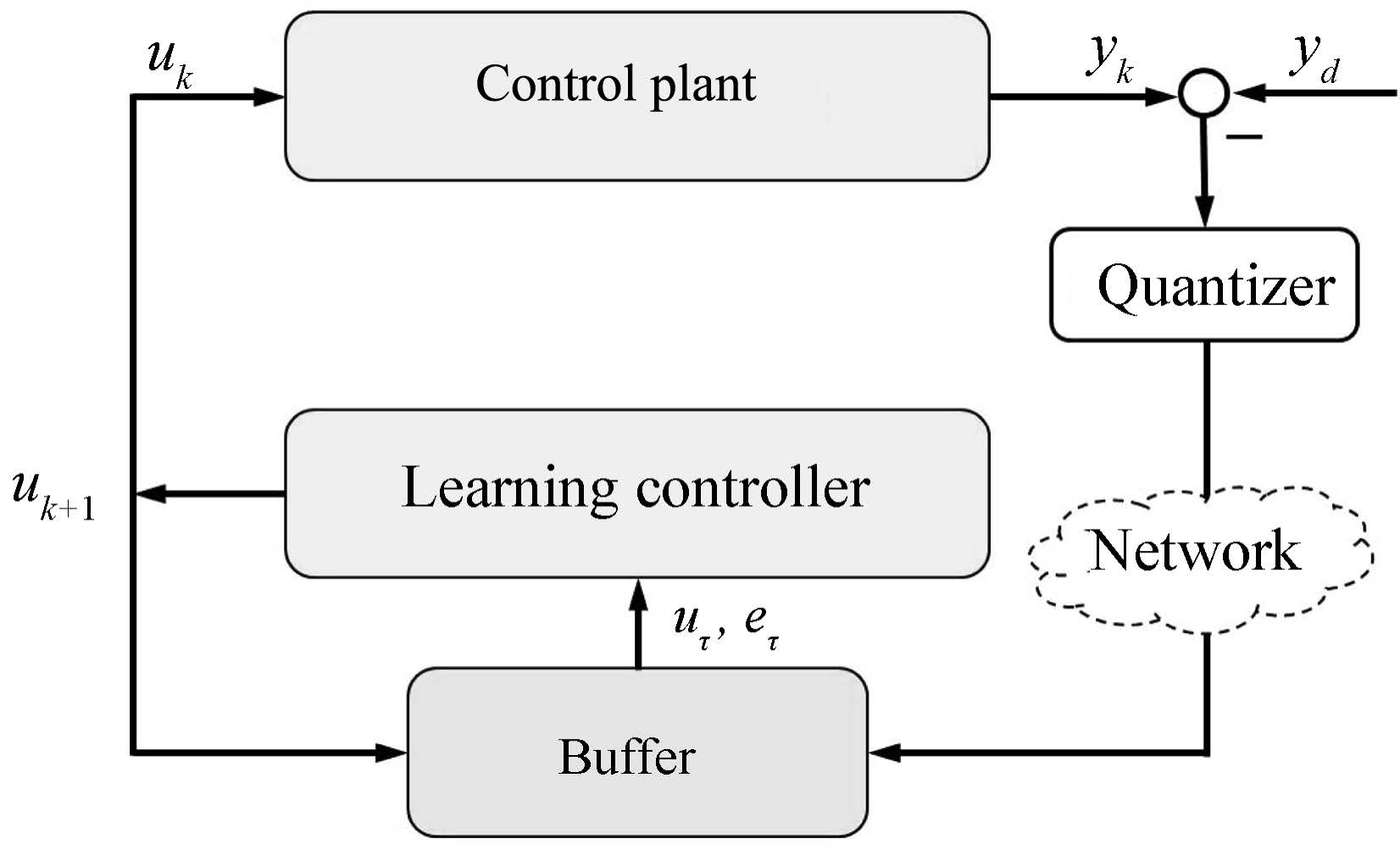
In this paper,we consider a networked implementation of the whole control system,i.e.,the plant and the controller are located in different sites as shown in Fig.1. To reduce transmission burden,for any specified tracking reference,we first transmit it to the plant before operating. Then the tracking error is generated,quantized,and transmitted back to the controller. Thus the delivery of the desired reference would need more efforts before starting learning. However,in the current implementation, the line from controller center to local plant site works well so that the input signal could be precisely transmitted. As one could see,the new desired reference could be delivered through this network.

|
Download:
|
| Fig. 1. Block diagram of networked control system. | |
{kind=link}
The update law used in this paper is
| ${u_{k + 1}}(t) = {u_k}(t) + {a_k}Q({e_k}(t + 1)),$ | (6) |
| $\begin{gathered} U = \{ \pm {z_i}:{z_i} = {\mu ^i}{z_0},i = 0,\pm 1,\pm 2,...\} \cup \{ 0\} ,\hfill \\ \quad 0 < \mu < 1,{z_0} > 0,\hfill \\ \end{gathered}$ | (7) |
| $Q(v) = \left\{ {\begin{array}{*{20}{l}} {{z_i},}&{if\frac{1}{{1 + \zeta }}{z_i} < v \leqslant \frac{1}{{1 - \zeta }}{z_i},} \\ {0,}&{ifv = 0,} \\ { - Q( - v),}&{ifv < 0,} \end{array}} \right.$ | (8) |
In
| $\begin{align}\label{quanerror} {Q}(e_k(t))-e_k(t)=\eta_k^t\cdot e_k(t), \end{align}$ | (9) |
Problem statements. Select suitable step-size $\{a_k\}$ and quantizer parameter $\mu$ such that the input sequence generated by update law (6) would minimize the tracking index (2) for stochastic linear system (1) under assumptions A1-A4.
The convergence of (6) is given in the following theorem.
Theorem 1. Consider stochastic linear system (1) and index (2),and assume A1-A4 hold,then the input generated by update law (6) with quantized tracking error is optimal according to Lemma 1 if the learning step-size $a_k$ satisfies $a_k>0$, $a_k\rightarrow0$,$\sum_{k=1}^{\infty}a_k=\infty$, $\sum_{k=1}^{\infty}a_k^2<\infty$ and the quantizer parameter $\mu$ is arbitrarily selected in the range $(0,1)$. In other words,$u_k(t)$ converges to $u_d(t)$ a.s. as $k\rightarrow\infty$ for any $t\in[0,N-1]$.
The proof is somewhat long and is given in Appendix B.
Remark 2. It is noted from Theorem 1 that the input sequence would converge to the optimal one no matter how dense the logarithmic quantizer is. In other words,the convergence is independent of $\zeta$ or $\mu$. This means that the algorithm can behave well even a rough quantizer is adopted,thus we may save much cost on devices. The inherent reason is that the quantization error is bounded by the actual tracking error. Consequently, larger tracking error means larger quantization error,however, this is acceptable because the learning is rough at this stage. While as the tracking error converges to zero,the quantization error also reduces to zero.
Remark 3. Because of the existence of stochastic noises,the actual tracking error would not converge to zero,which further leads to that the quantization error does not converge to zero. The sequence $\{a_k\}$ plays two roles here,one of which is to guarantee the zero-error convergence of the input almost surely, and the other one is to suppress the effect of stochastic noises and quantization errors as iteration number increases. However,it should be noted that the decreasing property of $a_k$ slows down the convergence speed of the proposed algorithm. This could be regarded as a trade-off of tracking performance and convergence speed.
Remark 4. Since the optimal tracking performance is achieved independent of quantizer,it leaves much freedom for the design of the algorithm. If the system is extended to MIMO case,where $C^+B(t)$ is a matrix,a learning gain matrix $L_t$ should be extra introduced as a learning direction satisfying that $L_tC^+B(t)$ is a square matrix and all its eigenvalues are positive. This condition is quite relaxed for stochastic systems.
Ⅳ Extension to Nonlinear SystemsIn this section,we extend the linear time-varying system (1) to the following affine nonlinear systems with measurement noise
| $\begin{array}{*{20}{l}} {}&{{x_k}(t + 1) = f(t,{x_k}(t)) + B(t,{x_k}(t)){u_k}(t),} \\ {}&{{y_k}(t) = C(t){x_k}(t) + {v_k}(t),} \end{array}$ | (10) |
The assumptions are modified as follows.
A5. The tracking reference $y_d(t)$ is realizable in the sense that there exist $u_d(t)$ and $x_d(0)$ such that
| $\begin{array}{*{20}{l}} {}&{{x_d}(t + 1) = f(t,{x_d}(t)) + B(t,{x_d}(t)){u_d}(t),} \\ {}&{{y_d}(t) = C(t){x_d}(t).} \end{array}$ | (11) |
A6. The functions $f(\cdot,\cdot)$ and $B(\cdot,\cdot)$ are continuous with respect to the second argument.
A7. The real number $C(t+1)B(t,x_d(t))$ coupling the input and output is an unknown nonzero constant but its sign is assumed known prior. Without loss of generality,it is assumed $C^+B_d(t):= C(t+1)B(t,x_d(t))>0$. Here $x_d(t)$ is the solution of the system (11).
A8. The initial values can asymptotically be precisely reset in the sense that $x_k(0)\rightarrow x_d(0)$ as $k\rightarrow\infty$.
A9. For each $t$,the measurement noise $\{v_k(t)\}$ is a sequence of IID random variables with ${\rm E}v_k(t)=0$,$\sup_k{\rm E}v_k^2(t)<\infty$,and $\lim_{n\rightarrow\infty}\frac{1}{n}\sum_{k=1}^nv_k^2(t)=R_v^t$, a.s. where $R_v^t$ is unknown.
For simple notations,let us denote$f_k(t)=f(t,x_k(t))$, $f_d(t)=f(t,x_d(t))$,$B_k(t)=B(t,x_k(t))$,$B_d(t)=B(t,x_d(t))$, $\delta f_k(t)=f_d(t)-f_k(t)$,$\delta B_k(t)=B_d(t)-B_k(t)$.
The following lemma is needed for the following analysis while the proof is given in Appendix C.
Lemma 2. Consider the nonlinear system (10) and assume A5-A8 hold. If $\lim_{k\rightarrow\infty}\delta u_k(s)=0$, $s=0,1,...,t$,then $\|\delta x_k(t+1)\|\rightarrow0$, $\|\delta f_k(t+1)\|\rightarrow0$,$\|\delta B_k(t+1)\|\rightarrow0$.
Based on Lemma 2,the conclusion of Lemma 1 also holds for the nonlinear system (10) with A1-A4 replaced by A5-A9 by using similar steps. The conclusions and proofs are no longer copied here.
We have the following convergence theorem.
Theorem 2. Consider nonlinear system (10) with measurement noises and index (2),and assume A5-A9 hold,then the input generated by update law (6) with quantized tracking error is optimal according to Lemma 1 if the learning step-size $a_k$ satisfies $a_k>0$,$a_k\rightarrow0$, $\sum_{k=1}^{\infty}a_k=\infty$,$\sum_{k=1}^{\infty}a_k^2<\infty$ and the quantizer parameter$\mu$ is arbitrarily selected in the range $(0,1)$. In other words,$u_k(t)$ converges to $u_d(t)$ a.s. as $k\rightarrow\infty$ for any $t\in[0,N-1]$.
Proof. As a result of the existence of nonlinear functions $f_k(t)$ and $B_k(t)$,it is hard to formulate the proof as in the linear case. Thus,the proof of Theorem 1 cannot be directly applied here. Instead the proof is carried out by mathematical induction along the time axis $t$.
Similar to the linear case,(24) and (25) are still valid for the nonlinear case. Then for any given time $t$,we have:
| $\begin{array}{*{20}{l}} {\delta {u_{k + 1}}(t) = }&{\delta {u_k}(t) - {a_k}(1 + \eta _k^{t + 1}){e_k}(t + 1)} \\ = &{\delta {u_k}(t) - {a_k}(1 + \eta _k^{t + 1})({C^ + }{B_k}(t)\delta {u_k}(t)} \\ {}&{ + {\theta _k}(t) - {v_k}(t + 1)),} \end{array}$ | (12) |
Base step. $t=0$. The recursion (12) is
| $\begin{array}{*{20}{l}} {\delta {u_{k + 1}}(0) = }&{(1 - {a_k}(1 + \eta _k^1){C^ + }{B_k}(0))\delta {u_k}(0)} \\ {}&{ - {a_k}(1 + \eta _k^1){\theta _k}(t) + {a_k}(1 + \eta _k^1){v_k}(1).} \end{array}$ | (13) |
By A6 it is observed that $B_k(0)$ is continuous in the initial state,while by A8 one has $B_k(0)\rightarrow B_d(0)$. Then $C^+B_k(0)$ converges to a positive constant by A7. Therefore we have:
| $(1 + \eta _k^1){C^ + }{B_k}(0) > \varepsilon ,\forall k \geqslant {k_0},$ | (14) |
Set
| $\begin{array}{*{20}{l}} {{\psi _{k,j}} = }&{(1 - {a_k}(1 + \eta _k^1){C^ + }{B_k}(0)) \times \cdots } \\ {}&{ \times (1 - {a_j}(1 + \eta _j^1){C^ + }{B_j}(0)),\quad \forall k \geqslant j.} \end{array}$ | (15) |
It is clear that $1-a_k(1+\eta_k^1)C^+B_k(0)>0$ for all large enough $k$,say,$k\geq k_0$ where $k_0$ also satisfies (14). Then for any $j\geq k_0$,we have: $\begin{gathered} {\psi _{k,j}} = {\psi _{k - 1,j}}(1 - {a_k}(1 + \eta _k^1){C^ + }{B_k}(0)) \hfill \\ \leqslant {\psi _{k - 1,j}}(1 - {a_k}\varepsilon ) \hfill \\ \leqslant {\psi _{k - 1,j}}\exp ( - \varepsilon {a_k}) \hfill \\ \leqslant \exp \left( { - \varepsilon \sum\limits_{i = j}^k {{a_i}} } \right). \hfill \\ \end{gathered} $ Noticing that $k_0$ is a finite integer,we have that $|{\psi _{k,j}}| \leqslant |{\psi _{k,{k_0}}}||{\psi _{{k_0} - 1,j}}| \leqslant {c_1}\exp \left( { - \varepsilon \sum\limits_{i = j}^k {{a_i}} } \right),$ for any $j\geq 1$ with $c_1>0$ being a suitable constant. Therefore,a growth estimation of $\psi_{k,j}$ is obtained.
From (13),it follows that
| $\begin{array}{*{20}{l}} {\delta {u_{k + 1}}(0) = }&{{\psi _{k,1}}\delta {u_1}(0) - \sum\limits_{j = 1}^k {{\psi _{k,j + 1}}} {a_j}(1 + \eta _j^1){\theta _k}(0)} \\ {}&{ + \sum\limits_{j = 1}^k {{\psi _{k,j + 1}}} {a_j}(1 + \eta _j^1){v_j}(1),} \end{array}$ | (16) |
Similar to the proof of Theorem 1, $\{ (1 + \eta _j^1){v_k}(1),{F_k}\} $ is a martingale difference sequence,and $\sum_{k=1}^{\infty}{\rm E}(a_k(1+\eta_k^1)v_k(1))^2\leq 4R_v^1\sum_{k=1}^\infty a_k^2<\infty$. This leads to
| $\begin{align} \sum_{k=1}^\infty a_k(1+\eta_k^1)v_k(1)<\infty. \end{align}$ | (17) |
Thus the last two terms at the right-hand side of (16) also tend
to zero as $k\rightarrow\infty$ following similar steps as in the
proof of Lemma 3.1.1 of
Inductive step. Assume that the optimality of input has been proved for $s=0,1,...,t-1$ and now let us show the validity for time$t$.
By the inductive assumption,we have $\delta u_k(s)\rightarrow0$, $s=0,1,...,t-1$,and then by Lemma 2,we have that $\delta x_k(t)\rightarrow0$,$\delta f_k(t)\rightarrow0$,and $\delta B_k(t)\rightarrow0$. This results in that $\theta_k(t)\rightarrow0$. As the case for $t=0$,a similar treatment leads to $\delta u_k(t)\rightarrow0$. This proves the conclusion for time $t$.
Ⅴ. Illustrative SimulationsTo show the effectiveness of our results,two illustrative
examples are given in this section. In addition,another update
law similar to the one proposed in
| $\begin{align}\label{updateout} u_{k+1}(t)=u_k(t)+a_k[y_d(t+1)-{Q}(y_k(t+1))], \end{align}$ | (18) |
| $\begin{align}\label{uniform} u_{k+1}(t)=u_k(t)+a_k{Q}_u(y_d(t+1)-y_k(t+1)), \end{align}$ | (19) |
For brevity of expression,in this section,the update laws (6), (18) and (19) are called error logarithmic quantization law (ELQL),output logarithmic quantization law (OLQL) and error uniform quantization law (EUQL),respectively.
A.Linear CaseConsider the following linear system with random noises
| $\begin{gathered} {x_k}(t + 1) = \left[{\begin{array}{*{20}{c}} { - 0.8 + 0.02\sin t}&{ - 0.22} \\ 1&0 \end{array}} \right]{x_k}(t) \hfill \\ \quad + \left[{\begin{array}{*{20}{c}} {0.5} \\ {1 - 0.05\cos (t/10)} \end{array}} \right]{u_k}(t) \hfill \\ \quad + {w_k}(t + 1),\hfill \\ {y_k}(t) = \left[{\begin{array}{*{20}{c}} 1&{0.5 + 0.5{{\text{e}}^{ - t}}} \end{array}} \right]{x_k}(t) + {v_k}(t),\hfill \\ \end{gathered}$ | (20) |
The desired tracking reference is given as $y_d(t)=5\sin(4t/25)+3\sin(2t/25)$,$t\in [0,100]$. Thus the initial desired state is $x_d(0)=0$. Let us set the initial state as $x_k(0)\sim {\rm N}(0,0.1^2)$ according to A4. The initial input is given as $u_0(t)=0$,$\forall t$.
The parameters of the logarithmic quantizer adopted in this section are selected $z_0=20$ and $\mu=0.7$. Thus it is a rough quantizer in a certain sense. The parameters of the uniform quantizer is $\nu=2/3$. The learning gain $a_k$ is chosen as $a_k=2.3/k$ satisfying the requirements in Theorem 1. The algorithm is performed for 100 iterations.
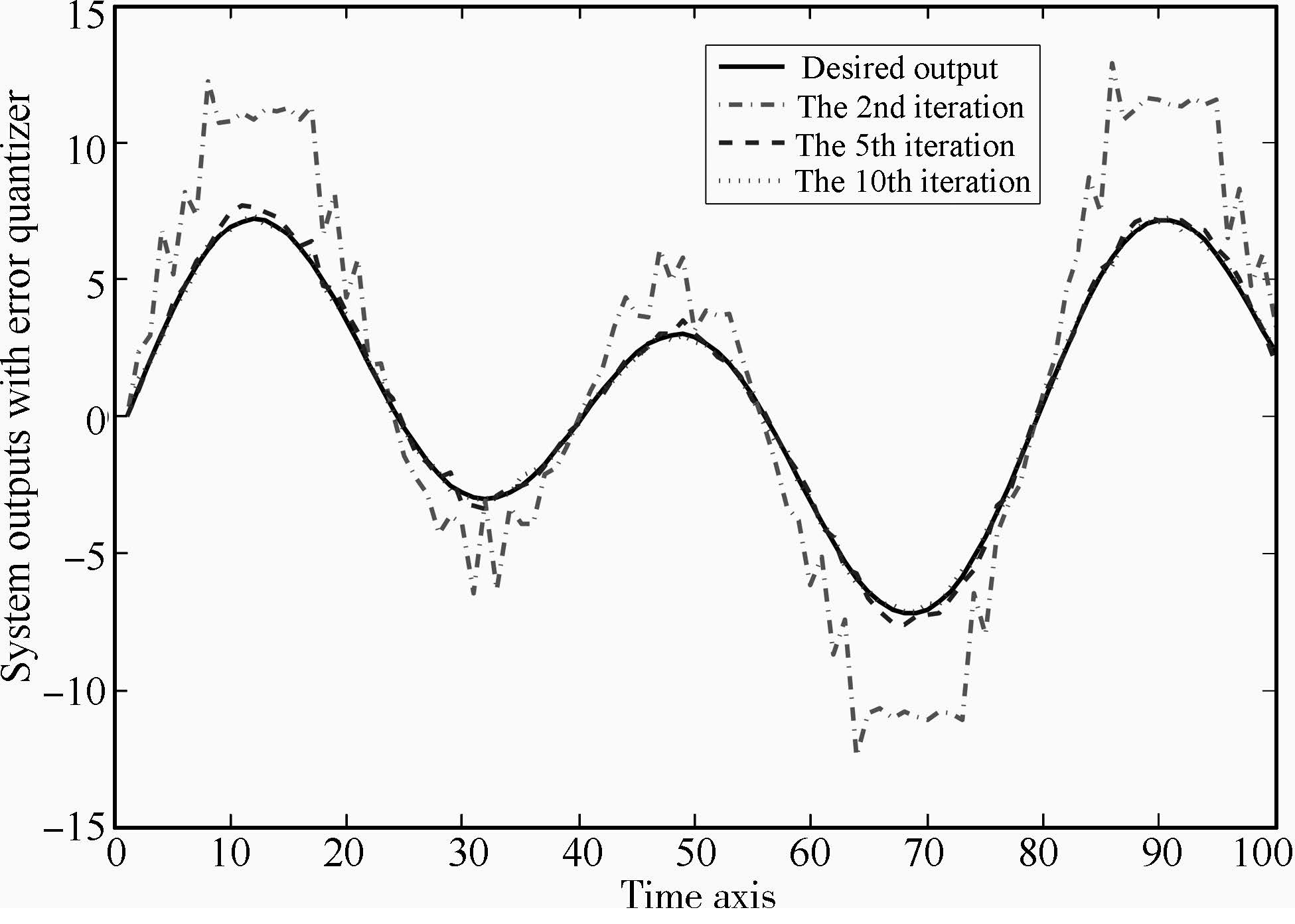
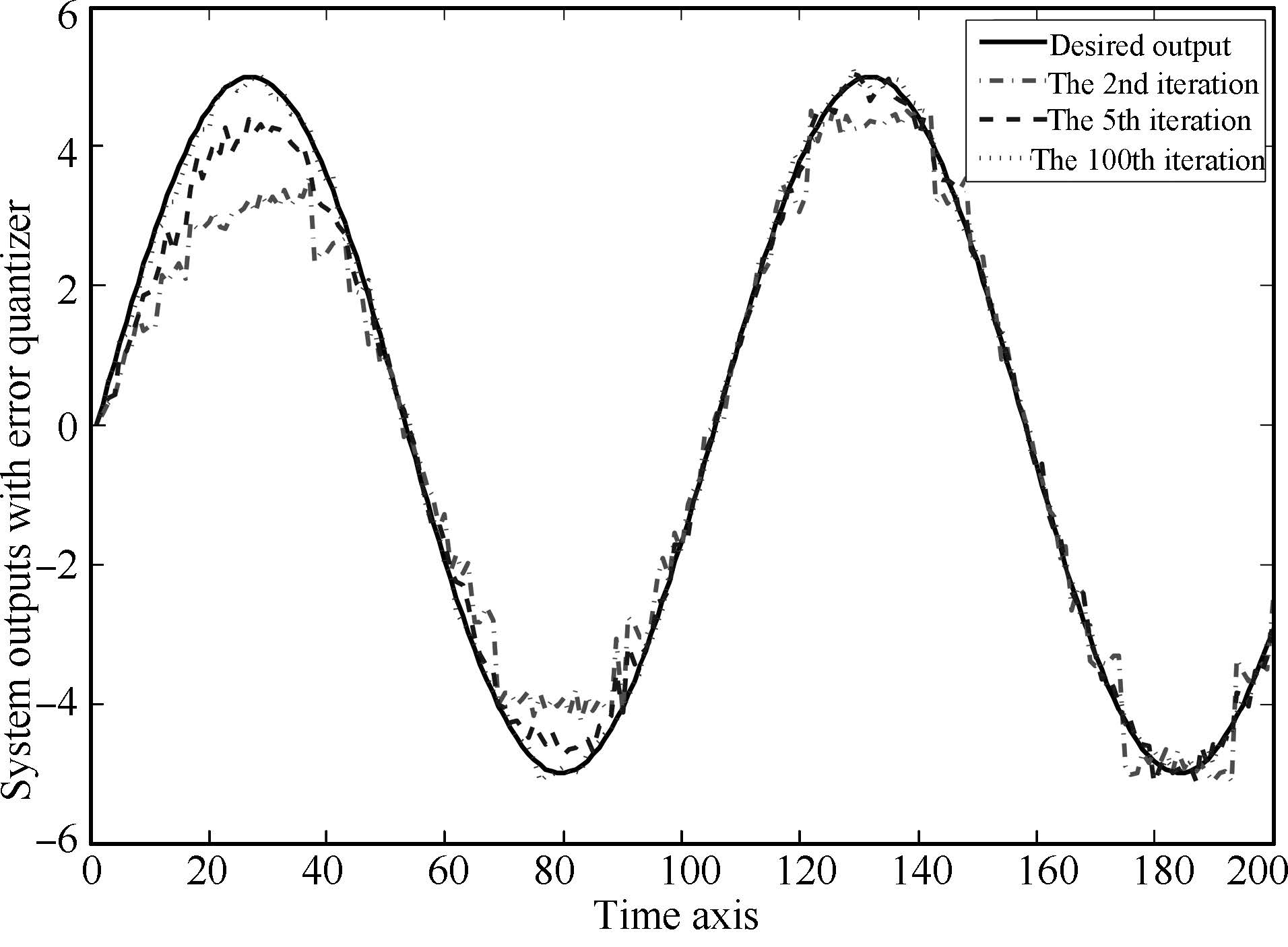
The tracking performance at the 2nd,5th,and 100th iterations is shown in Fig.2. One could find that the output tracking performance at the 5th iteration is acceptable while at the 100th iteration almost coincides with the desired reference. Thus the proposed algorithm is quite effective for iterative learning tracking.

|
Download:
|
| Fig. 2. Tracking performance at the 2nd,5th,and 100th iterations for linear case. | |
{kind=link}
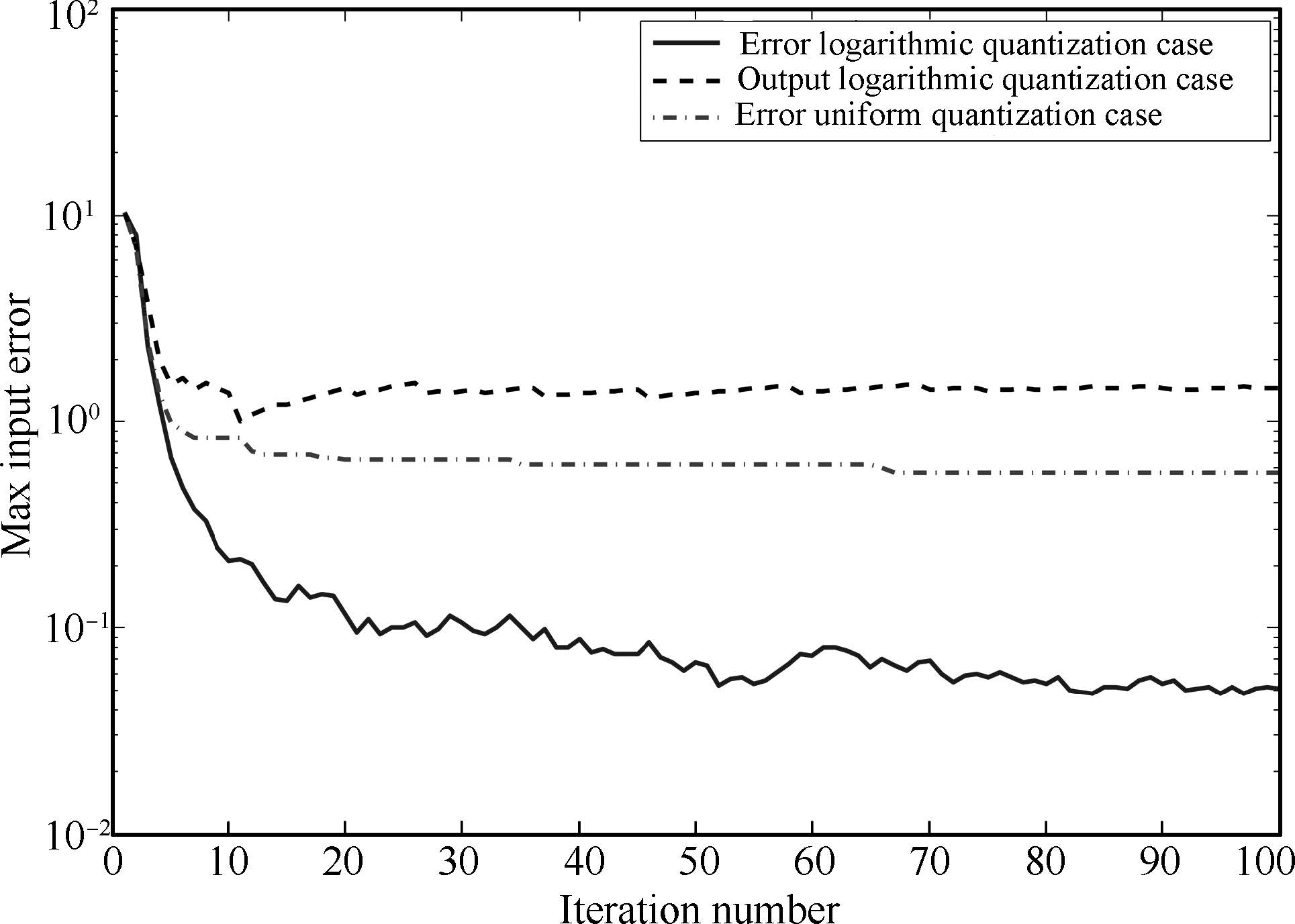
In addition,Fig.3 shows the convergence of input sequences for ELQL,OLQL and EUQL cases,where the solid,dash,and dash-dotted lines denote the maximal errors $\max_t|u_d(t)-u_k(t)|$,between the generated input and the desired input for ELQL,OLQL,and EUQL cases,respectively. The figure is plotted in logarithmic form to be more illustrative. Thus,to show the convergence of input,it should be illustrated that these errors converge to zero. From the figure,one could find that the ELQL case keeps a downward trend as iteration number increases,while the other two cases converge to nonzero values quickly. Besides,the maximal error of ELQL case is much smaller than those of the other two cases. Thus the ELQL case has a much better performance than the other two cases.

|
Download:
|
| Fig. 3. Convergence of input sequence for linear case. | |
{kind=link}
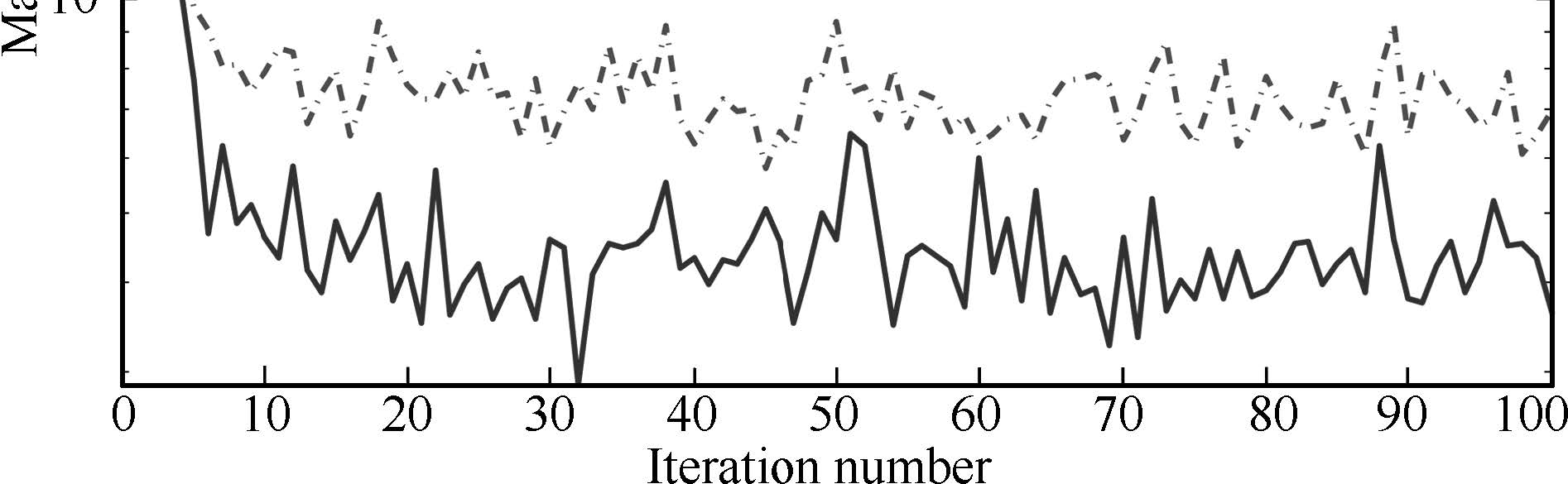
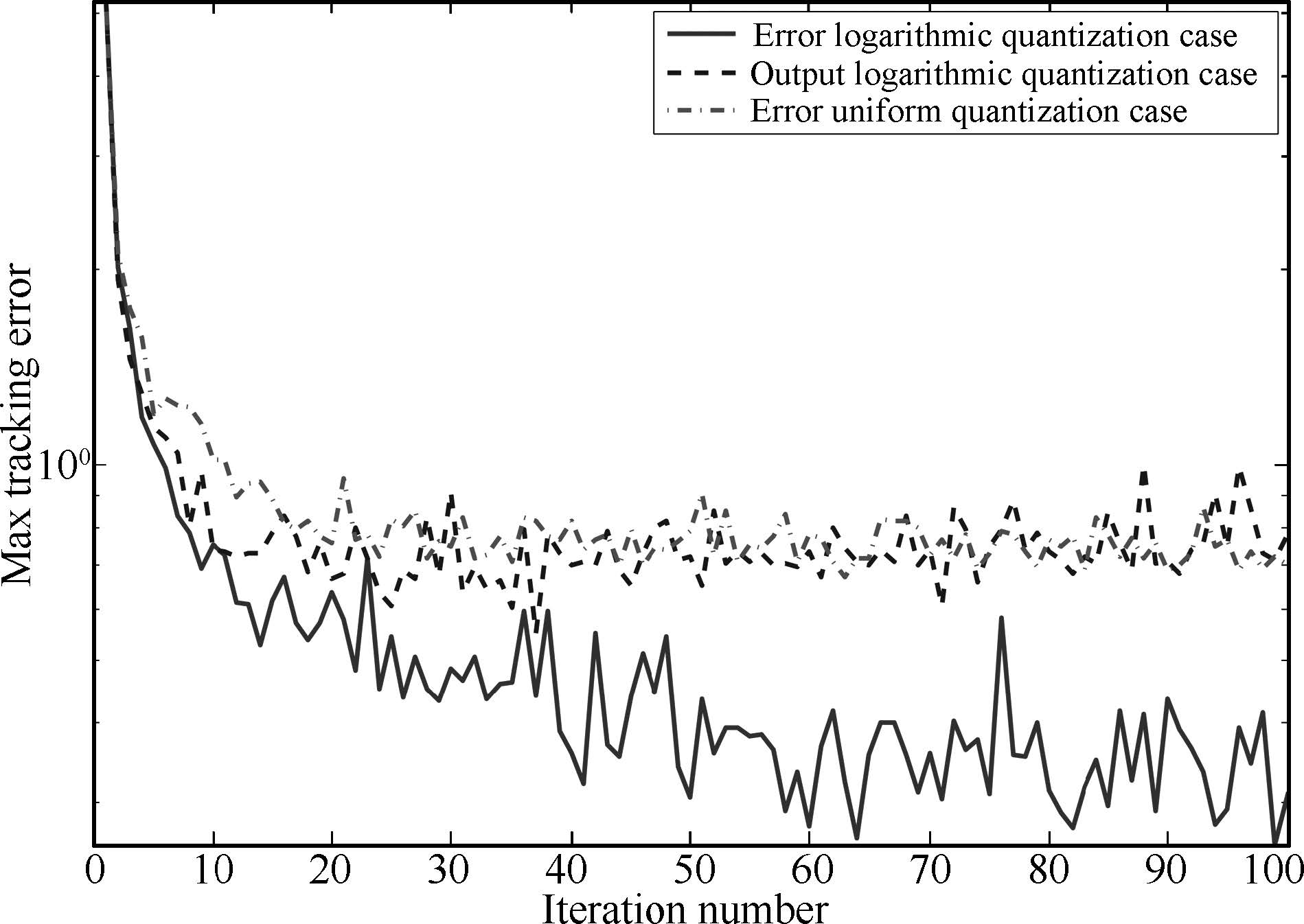
The maximal tracking errors,$\max_t|e_k(t)|$,are shown in Fig.4,which further verifies the effectiveness. As one could see from the figure,the ELQL case,denoted by solid line,behaves better than the OLQL case,denoted by dash line and the EUQL case, denoted by dash-dotted line. This is because the quantization error is reduced as the tracking error goes to zero in the ELQL case while the quantization error is large when the desired reference value is large in the OLQL case and the quantization error would not decrease further if the tracking error has come into the smallest bound of the uniform quantizer in the EUQL case. It should be pointed out that the maximal tracking error could not converge to zero due to the existence of random noises.

|
Download:
|
| Fig. 4. Maximal tracking error $\max_t|e_k(t)|$ for linear case. | |
{kind=link}
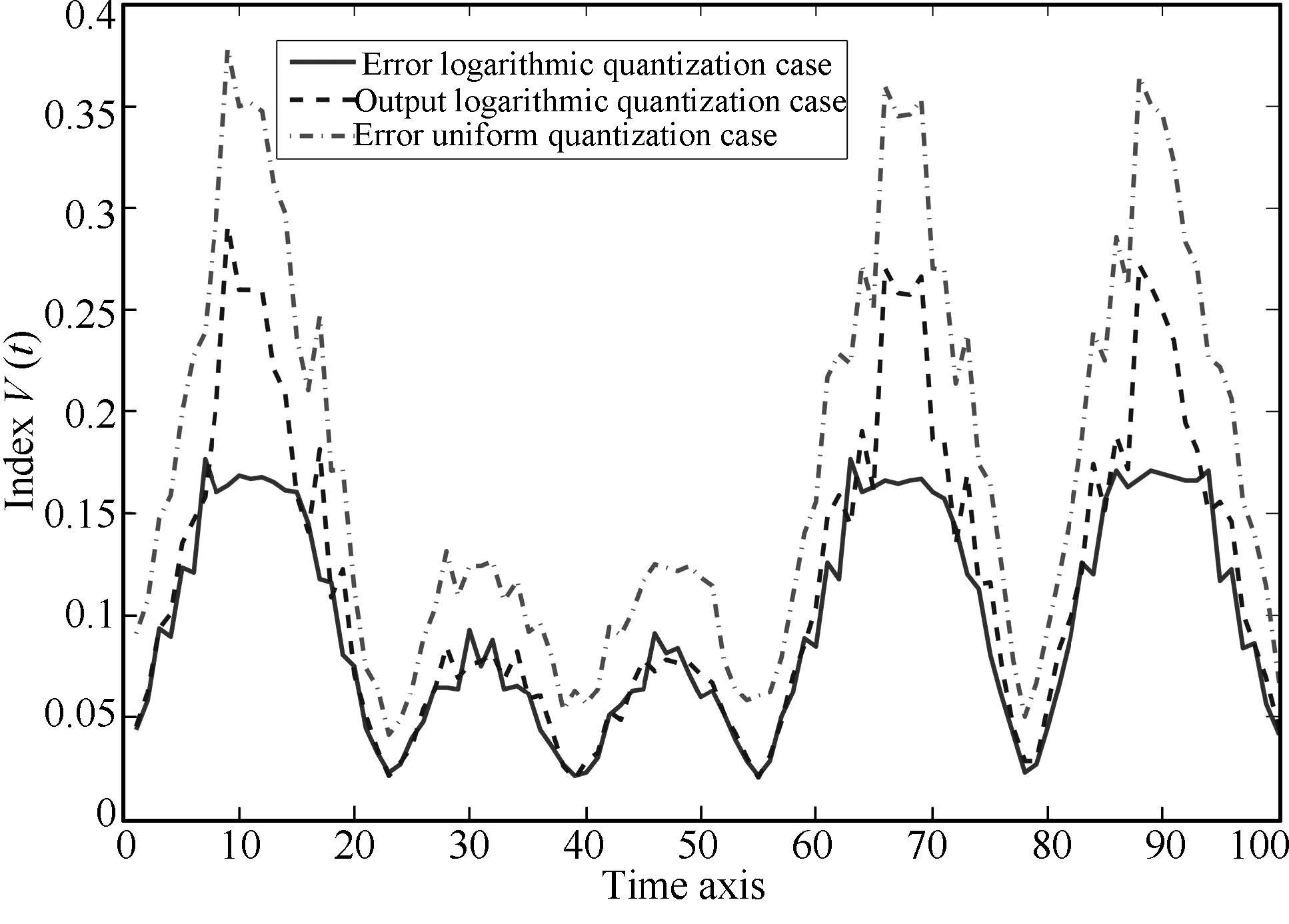
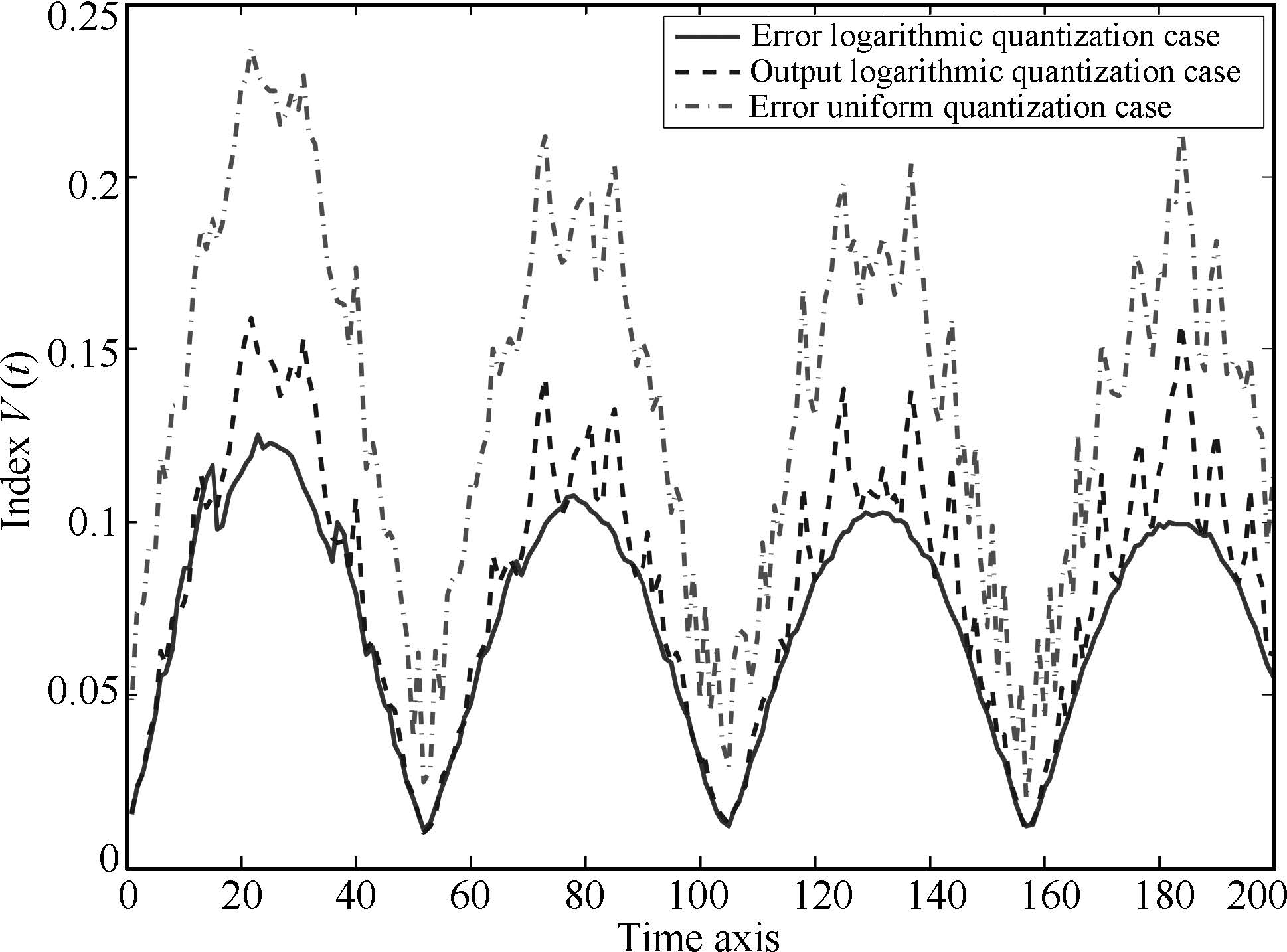
To make a more intuitive comparison on the performance of ELQL, OLQL,and EUQL cases,the tracking index $V(t)$ is computed for 100 iterations and shown in Fig.5. The index values in the ELQL case are much smaller than those in OLQL and EUQL cases,which coincide with the fact that the averaged tracking error in the ELQL case is mainly generated by stochastic noises while the average error in OLQL and EUQL cases are caused by both quantization errors and stochastic noises.

|
Download:
|
| Fig. 5. Tracking index value for linear case. | |
{kind=link}
Additionally,some comments are given as follows. In the OLQL case,the output is quantized and thus the quantization error might be large if the output is large by noticing the properties of selected logarithmic quantizer. Consequently,the quantizer should be denser to make a more accurate tracking. That is,the parameter $\mu$ should be a bit larger. As a matter of fact,we further make simulations for the case $\mu=0.9$ and it is seen that the differences between the OLQL case and the ELQL case are much smaller. Therefore,the OLQL depends more on the quantizer while the ELQL could behave well even the quantization is rough.
As mentioned in Remark 3,the learning gain parameter $a_k$ needs to guarantee convergence and suppress noise. Thus $\{a_k\}$ has to satisfy the conditions given in the theorems. It is obvious that $a_k=a/k$ meets these requirements,where $a>0$ is a suitable constant. For practical applications,the constant $a$ should be set appropriately large in order to make a fast convergence but also not too large to lead to a bad tracking performance.
B.Nonlinear CaseFor the nonlinear case,let us consider the following system
| $\begin{array}{*{20}{l}} {{x_k}(t + 1) = }&{\left[{\begin{array}{*{20}{c}} { - 0.75\sin (x_k^{(1)}(t))} \\ { - 0.5\cos (x_k^{(2)}(t))} \end{array}} \right]} \\ {}&{ + \left[{\begin{array}{*{20}{c}} {0.5 + 0.1\cos (x_k^{(1)}(t)/5)} \\ 1 \end{array}} \right]{u_k}(t),} \\ {{y_k}(t) = }&{[0.10.02{t^{1/3}}]{x_k}(t) + {v_k}(t),} \end{array}$ | (21) |
The desired tracking reference is given as $y_d(t)=5\sin(3t/50)$, $t\in [0,200]$. The initial desired state is set $x_k(0)=x_d(0)=0$. The initial input is $u_0(t)=0$,$\forall t$.
The parameters of quantizers are the same as in the linear case. The learning gain $a_k$ is $a_k=6.5/k$. The algorithm is performed for 100 iterations.
Fig.6 shows the tracking performance at the 2nd,5th,and 100th iteration. It is seen that the output at the 100th iteration is satisfactory. The convergence of input sequence for both ELQL,OLQL and EUQL cases are provided in Fig.7. Here the input error is caused by the coupling of nonlinearities and stochastic noises. In addition,the decreasing gain $a_k$ also makes a slow improvement in input. In other words,much more iterations are needed for further improvements in input. However,it should be noted that the maximal input error for the ELQL case keeps decreasing along iteration axis, which is apparently different from the other two cases.

|
Download:
|
| Fig. 6. Tracking performance at the 2nd,5th,and 100th iterations for nonlinear case. | |
{kind=link}

|
Download:
|
| Fig. 7. Convergence of input sequence for nonlinear case. | |
{kind=link}
The maximal tracking error,$\max_t|e_k(t)|$,along iteration is shown in Fig.8 while the averaged index value is computed in Fig.9,respectively. Similar conclusions to the linear case could be derived.

|
Download:
|
| Fig. 8. Maximal tracking error $\max_t|e_k(t)|$ for nonlinear case. | |
{kind=link}

|
Download:
|
| Fig. 9. Tracking index value for nonlinear case. | |
{kind=link}
In this paper,the ILC problem for both linear and nonlinear discrete-time systems with stochastic noises is considered under networked control system scheme. An update law is built based on quantized error information,which is generated from the plant side by comparing and quantizing using a logarithmic quantizer. In this case,the stochastic noises and quantization errors are coupled in the transmitted data. A decreasing learning gain is introduced to the algorithm and it is proved that the input sequence would converge to the optimal input under averaged tracking performance index. Two illustrative simulations are provided for both linear and nonlinear systems and the results coincide with theoretical analysis. For further research,it is of great interest to consider relaxations on the selection of quantizer.
APPENDIX A
PROOF OF LEMMA 1
For simplicity of expression,denote $\delta x_k(t):= x_d(t)-x_k(t)$and $\delta u_k(t):= u_d(t)-u_k(t)$. From (1) and (4),we have: $\delta {x_k}(t + 1) = A(t)\delta {x_k}(t) + B(t)\delta {u_k}(t) - {w_k}(t + 1),$ and recursively this leads to $\delta {x_k}(t + 1) = \sum\limits_{i = 1}^{t + 1} {\left( {\prod\limits_{l = i}^t A (l)} \right)} B(i - 1)\delta {u_k}(i - 1) - \sum\limits_{i = 0}^{t + 1} {\left( {\prod\limits_{l = i}^t A (l)} \right)} {w_k}(i),$ where $\prod_{l=i}^{j}A(l):= A(j)A(j-1)... A(i)$,$j\geq i$ and $\prod_{l=i}^{j}A(l)=I$,$j<i$. Thereby $\begin{gathered} {y_d}(t + 1) - {y_k}(t + 1) = C(t + 1)\delta {x_k}(t + 1) - {v_k}(t + 1) \hfill \\ = {\phi _k}(t + 1) + {\varphi _k}(t + 1) - {v_k}(t + 1),\hfill \\ \end{gathered} $ where $\begin{gathered} {\phi _k}(t + 1) = C(t + 1)\sum\limits_{i = 1}^{t + 1} {\left( {\prod\limits_{l = i}^t A (l)} \right)} B(i - 1)\delta {u_k}(i - 1),\hfill \\ {\varphi _k}(t + 1) = C(t + 1)\sum\limits_{i = 0}^{t + 1} {\left( {\prod\limits_{l = i}^t A (l)} \right)} {w_k}(i). \hfill \\ \end{gathered} $ By A3 and A4 and noticing that $u_k(i)\in\mathcal{F}_{k-1}$, $i=0,1,...,t$,it is clear that $\phi_k(t+1)$, $\varphi_k(t+1)$,and $v_k(t+1)$ are mutually independent.
It is noticed that
| $\begin{gathered} \sum\limits_{k = 1}^n {{\phi _k}} (t)({\varphi _k}(t) - {v_k}(t)) = O\left( {{{\left( {\sum\limits_{k = 1}^n {{\phi _k}(t){^2}} } \right)}^{\frac{1}{2} + \gamma }}} \right),\hfill \\ \qquad \qquad \qquad \qquad \forall \gamma > 0,\hfill \\ \end{gathered}$ | (A1) |
| $\begin{gathered} \sum\limits_{k = 1}^n {{\varphi _k}} (t){v_k}(t) = O\left( {{{\left( {\sum\limits_{k = 1}^n {{v_k}(} t){^2}} \right)}^{\frac{1}{2} + \gamma }}} \right),\hfill \\ \qquad \qquad \qquad \qquad \forall \gamma > 0. \hfill \\ \end{gathered}$ | (A2) |
Therefore,the tracking index (2) is minimized if the first term of last equation,i.e., $\limsup_{n\rightarrow\infty}\frac{1}{n}\sum_{k=1}^n\|\phi_k(t+1)\|^2$, equals zero. It is clear that the condition is satisfied if $u_k(t)\rightarrow u_d(t)$ as $k\rightarrow\infty$.
APPENDIX B
PROOF OF THEOREM 1
Denote $\delta x_k(t):= x_d(t)-x_k(t)$ and $\delta u_k(t):= u_d(t)-u_k(t)$. From (6) we have
| $\delta {{u}_{k+1}}(t)=\delta {{u}_{k}}(t)-{{a}_{k}}Q({{e}_{k}}(t+1)).$ | (A3) |
| $\delta {{u}_{k+1}}(t)=\delta {{u}_{k}}(t)-{{a}_{k}}(1+\Delta {{e}_{k}}(t+1)){{e}_{k}}(t+1),$ | (A4) |
Then stack the input into a vector $\delta U_k=[\delta u_k(0),\delta u_k(1),...,\delta u_k(N-1)]^{\rm T}$ and the noise term into $\xi_k=\left[\begin{array}{c} C(1)\sum\limits_{i=0}^{1}\left(\prod\limits_{l=i}^0A(l)\right)w_k(i)+v_k(1)\\ C(2)\sum\limits_{i=0}^{2}\left(\prod\limits_{l=i}^1A(l)\right)w_k(i)+v_k(2)\\ \vdots\\ C(N)\sum\limits_{i=0}^{N}\left(\prod\limits_{l=i}^{N-1}A(l)\right)w_k(i)+v_k(N) \end{array}\right].$ Now from the above expressions we have:
| $\delta {{U}_{k+1}}=(I-{{a}_{k}}{{\Gamma }_{k}}H)\delta {{U}_{k}}+{{a}_{k}}{{\Gamma }_{k}}{{\xi }_{k}},$ | (A5) |
Noticing that $\Gamma_k$ is a diagonal matrix and $H$ is a lower triangular matrix,it is obvious that $\Gamma_kH$ also is a lower triangular matrix,thus,the eigenvalues of $\Gamma_kH$ are its diagonal elements. By the definition of $\Gamma_k$ and $H$ it is clear that the eigenvalues of $\Gamma_kH$ are $(1+\eta_k^1)C^+B(0)$,$...$,$(1+\eta_k^N)C^+B(N-1)$. Since $|\eta_k^t|<1$,it is evident$1+\eta_k^t>0$,$\forall t$. Combining with A1,we have that $(1+\eta_k^t)C^+B(t-1)$ is positive,$1\leq t\leq N$. In addition, $\eta_k^t>-\zeta=-(1-\mu)/(1+\mu)$,thus $1+\eta_k^t>2\mu/(1+\mu)$. Therefore,there is a lower bound for each eigenvalue of $\Gamma_kH$. This means that there is a positive definite matrix $P$ such that $(\Gamma_kH)^{\rm T}P+P\Gamma_kH\geq I.$ Set
| ${{\Phi }_{k,j}}=(I-{{a}_{k}}{{\Gamma }_{k}}H)...(I-{{a}_{j}}{{\Gamma }_{j}}H),\quad \forall k\ge j.$ | (A6) |
| $\|{{\Phi }_{k,j}}\|\le {{c}_{0}}\exp \left[-c\sum\limits_{i=j}^{k}{{{a}_{i}}} \right],\forall k\ge j,\forall j\ge 0.$ | (A7) |
| $\begin{align} & \|I-{{a}_{k}}{{P}^{-1}}+a_{k}^{2}{{P}^{-\frac{1}{2}}}{{H}^{\text{T}}}\Gamma _{k}^{\text{T}}P{{\Gamma }_{k}}H{{P}^{-\frac{1}{2}}}\| \\ & \le 1-2c{{a}_{k}}<{{\text{e}}^{-2c{{a}_{k}}}},\\ \end{align}$ | (A8) |
Comparing with Lemma 3.3.1 in
However,by the definition of ${F_k}$ and $\delta U_k$, and assumptions A3-A4,it is found that $\Gamma_k$ is independent of $\xi_k$. Further,${\rm E}(\Gamma_k\xi_k|\mathcal{F}_{k-1})=\Gamma_k{\rm E}(\xi_k|\mathcal{F}_{k-1})=0$. In addition,$\{a_k\}$ is a prior given sequence. Thus,$(a_k\Gamma_k\xi_k,\mathcal{F}_k)$ is a martingale difference sequence.
Noticing $|\eta_k^t|<1$,thus $\Gamma_k$ is bounded,i.e., $\|\Gamma_k\|^2<c_1$ with suitable $c_1>0$. Then,we have $\sum_{k=1}^{\infty}{\rm E}\|a_k\Gamma_k\xi_k\|^2 \leq c_1 \sum_{k=1}^{\infty}a_k^2{\rm E}\|\xi_k\|^2 \leq c_1c_2 \sum_{k=1}^{\infty}a_k^2<\infty,$ where $c_2>0$is a suitable constant which depends on $R_w^t$, $R_v^t$,and $R_0$. By martingale difference convergence theorem it is evident that $\sum_{k=1}^{\infty}a_k\Gamma_k\xi_k<\infty$.
APPENDIX C
PROOF OF LEMMA 2
The proof of this lemma can be carried out by induction along the time axis $t$. From (10) and (11) it is noted that
| $\begin{array}{*{35}{l}} \delta {{x}_{k}}(t+1)= & {{f}_{d}}(t)-{{f}_{k}}(t)+{{B}_{d}}(t){{u}_{d}}(t)-{{B}_{k}}(t){{u}_{k}}(t) \\ = & \delta {{f}_{k}}(t)+\delta {{B}_{k}}(t){{u}_{d}}(t)+{{B}_{k}}(t)\delta {{u}_{k}}(t). \\ \end{array}$ | (A9) |
Inductively,let us now assume that the conclusion of the lemma is true for $s=0,1,...,t-1$. It suffices to show that the conclusion is valid for $t$,i.e.,$\delta x_k(t+1)\rightarrow0$, $\delta f_k(t+1)\rightarrow0$,and $\delta B_k(t+1)\rightarrow0$. This could be done by similar steps as above.
| [1] | Arimoto S, Kawamura S, Miyazaki F. Bettering operation of robots by learning. Journal of Robotic Systems, 1984, 1(2):123-140 |
| [2] | Bristow D A, Tharayil M, Alleyne A G. A survey of iterative learning control:a learning-based method for high-performance tracking control. IEEE Control Systems Magazine, 2006, 26(3):96-114 |
| [3] | Ahn H S, Chen Y Q, Moore K L. Iterative learning control:brief survey and categorization. IEEE Transactions on Systems, Man, and Cybernetics, Part C:Applications and Reviews, 2007, 37(6):1099-1121 |
| [4] | Shen D, Wang Y Q. Survey on stochastic iterative learning control. Journal of Process Control, 2014, 24(12):64-77 |
| [5] | Curry R E. Estimation and Control with Quantized Measurements. Cambridge:MIT Press, 1970. |
| [6] | Wang L Y, Yin G G, Zhang J F, Zhao Y L. System Identification with Quantized Observations. Boston:Birkhäuser, 2010. |
| [7] | Jiang Z P, Liu T F. Quantized nonlinear control-a survey. Acta Automatica Sinica, 2013, 39(11):1820-1830 |
| [8] | Brockett R W, Liberzon D. Quantized feedback stabilization of linear systems. IEEE Transactions on Automatic Control, 2000, 45(7):1279-1289 |
| [9] | Fagnani F, Zampieri S. Quantized stabilization of linear systems:complexity versus performance. IEEE Transactions on Automatic Control, 2004, 49(9):1534-1548 |
| [10] | Bu X H, Wang T H, Hou Z S, Chi R H. Iterative learning control for discrete-time systems with quantised measurements. IET Control Theory & Applications, 2015, 9(9):1455-1460 |
| [11] | Elia N, Mitter S K. Stabilization of linear systems with limited information. IEEE Transactions on Automatic Control, 2001, 46(9):1384-1400 |
| [12] | Fu M Y, Xie L H. The sector bound approach to quantized feedback control. IEEE Transactions on Automatic Control, 2005, 50(11):1698-1710 |
| [13] | Chen H F. Stochastic Approximation and its Applications. Dordrecht, the Netherlands:Kluwer Academic Publishers, 2002. |