 2016, Vol.3
2016, Vol.3 



2. Faculty of Science and Technology, University of Macau, Macau 999078, China;
3. Guangdong Key Laboratory of IoT Information Processing, China
RECENTLY,a variety of mechanical systems have received
significant attention in research communities [1,2,3,4,5,67].
However,in the field of control practices,various kinds of
severe uncertainties cannot help but accompany mechanical
systems
The promising solution to the unknown control coefficients
problem was reported in
In fact,such difficulty implies that it is not ensured in
theory to extend the Nussbaum gain from one to multiple.
To realize the extension,some pioneering works
[22, 23, 24, 25, 26, 27] have
been conducted to handle each subsystem’s control coefficient
by utilizing the decentralized based approaches. Boulkroune et
al.
Though remarkable progresses have been achieved,existing
literatures work are based on the assumption that unknown
control coefficients should be constant or the upper and lower
bounds of control coefficients should be available as the prior
knowledge. However,for many mechanical systems,the actuator
dynamics (the control coefficient) not only is unknown
to the control procedure,but also performs nonlinearly. Particularly,
nonlinearities and uncertainties including backlash,
saturation,hysteresis,and deadzone are common phenomena
in many systems
[8, 33, 34, 35, 36, 37, 38, 39, 40, 41, 42, 43]. Due to the nonsmooth time-varying
characteristic,these nonlinearities may result in the control
failure or the instability
Motivated by above analyses,an adaptive control scheme is developed for MIMO mechanical systems with unknown actuator nonlinearities. The main properties of this paper are presented as follows:
1) A powerful Nussbaum analysis tool is presented in Theorem 1,where the control problem from unknown time-varying input coefficients and their signs are simultaneously tackled without any prior knowledge of input coefficients. Therefore,it lays the groundwork for realizing MIMO mechanical systems with unknown actuator nonlinearities.
2) As shown in Theorem 2,the developed Nussbaum analysis tool is successfully combined with adaptive robust control. Hence,unknown bounded disturbances from timevarying actuator nonlinearities are compensated in the stability analysis. Moreover,the proposed control is not limited to mechanical systems and can be applied to large-scale nonlinear systems.
Ⅱ. PROBLEM FORMULATION AND PRELIMINARIES The mechanical system can be expressed as the following
dynamical process
| $ \begin{align}{W} (r ){\ddot r } +{H} (r ,{\dot r } ){\dot r } +{G} (r ) ={u},\end{align} $ | (1) |
where $r\in R^{L\times 1}$ denotes the displacement; $\dot
r\in R^{L\times 1}$ denotes the velocity; $W(r)\in {\bf
R}^{L\times L}$ is the inertial matrix; $H (r ,{\dot r} )\in {\bf
R}^{L\times L}$ denotes the Coriolis and centrifugal matrix; $G(r)\in R^{L\times 1}$ denotes the gravitational force
vector; and $u\in R^{L\times 1} $ denotes the actual torque
or force being exerting on the mechanical system. It is noted
that the torque or force $u$ is affected by unknown actuator
nonlinearities. Therefore,$u$ can be described mathematically
as [33, 35, 38, 39, 40, 41, 42, 46, 47]
| $ \begin{align} u=\vartheta(t)\tau+T,\end{align} $ | (2) |
where $\tau$ is the control law to be designed; the time-varying matrix $\vartheta(t)\in R^{L\times L}$ is given as $\vartheta(t)={\rm diag}[{\vartheta}_1(t),... , {\vartheta}_i(t),... ,{\vartheta}_L(t)]$; and ${T}\in {\bf R}^{L\times 1} $ is the unmodelled vector. It is noted that ${\vartheta}_i(t)$ is bounded for $i=1,... ,L$,but its upper or lower bounds are unknown. Each element of the vector ${T}$ in (2) satisfies $\vert {T_i}\vert\le K_{r_{i}}$ with $K_{r_{i}}$ being an unknown constant.
Remark 1. The practical significance of (2) stems from the existence of unknown actuator nonlinearities. As shown in remarkable works [33, 35, 38, 39, 40, 41, 42, 46, 47],(2) is not limited to describe a certain kind of the actuator nonlinearity,but has the capacity of modelling actuator nonlinearities including hysteresis,deadzone,and saturation in many physical applications. As a result,(2) denotes a unified mathematical form,which is suitable to model a wide range of actuator nonlinearities.
The control objective is to establish a novel Nussbaum analysis tool for MIMO systems and to design an appropriate and effective control input $\tau$ for the mechanical system with unknown actuator nonlinearities. After applying the control law $\tau$, one obtains that the displacement and the velocity should converge to the desired trajectories,respectively. That is, $r(t)\rightarrow r_d(t)$ and $\dot r(t)\rightarrow \dot r_d(t)$, where $(\cdot)_d$ means the desired trajectory.
To facilitate the control analysis,three properties are summarized as follows [1,8,44,45]:
Property 1. The matrix $W(r) $ is symmetric positive definite.
Property 2. The matrix $\big\{2H (r,\dot r )-\dot W (r )\big\}$ is skew-symmetric.
Property 3. Three terms at the left hand of (1) can be reformulated as $ {W} (r ){\ddot r_e } +{H} (r ,{\dot r } ){ \dot r_e} +{G} (r )=\Theta(r,\dot r,\dot r_e,\ddot r_e)\aleph,$ where the constant vector $\aleph$ denotes physical parameters of the mechanical system; $\dot r_e$ $R^{L\times 1}$ is defined as the reference velocity error with $ \dot r_e=\dot r_d-\delta\tilde{r}$,$\tilde{r}=r-r_d$ and $\delta\in{\bf R}^{L\times L}$ being a symmetric positive definite matrix; $\ddot r_e$ denotes the time derivative of $ \dot r_e$; and $\Theta(r, \dot r,\dot r_e,\ddot r_e)$ is defined as the regression matrix.
Ⅲ. NUSSBAUM ANALYSIS TOOL AND ITS PROPERTIESA Nussbaum gain based control approach is usually used to
investigate unknown control coefficients. The main question is how
to remove the limitation of prior knowledge of time-varying
coefficients' upper and lower bounds. To get rid of the dilemma,a
novel
Nussbaum gain is modified from
| $ \begin{align}\mathcal{G}_N(\hbar)=-\exp\left({\frac{\hbar^2}{2}}\right)(\hbar^2+2)\sin(\hbar),\end{align} $ | (3) |
where $\hbar$ denotes a real variable.
Proposition 1. Derived from the observation of the proposed definition (3),four important properties of $\mathcal{G}_N(\hbar)$ are presented as:
1) $\mathcal{G}_N(\hbar)$ is an odd function with $\hbar$ being a real variable. Moreover,the integration of $\mathcal{G}_N(\hbar)$ over the interval $[0,\hbar]$ is defined as $\mathcal{G}_T(\hbar)=\int_0^\hbar\mathcal{G}_N(\chi){\rm d}\chi$. Hence,$\mathcal{G}_T(\hbar)$ is even with respect to $\hbar$.
2) The minimal value of $\mathcal{G}_T(\hbar)$ over the interval $\hbar\in[0,2k\pi+\pi]$ can be derived at $\hbar=2k\pi+\pi$ and its minimum can be calculated as $\mathcal{G}_{T_{\rm min}}=-\exp\left({\frac{(2k\pi+\pi)^2}{2}}\right)-1$,where $k$ is a positive integer. The maximal value of $\mathcal{G}_T(\hbar)$ over the interval $ \hbar\in[0,2k\pi+\pi]$ can be obtained at $\hbar=2k\pi$ and its maximum can be computed as $\mathcal{G}_{T_{\rm max}}=\exp\left({\frac{(2k\pi)^2}{2}}\right)-1$.
3) As $\hbar$ approaches the infinity,$\mathcal{G}_N(\hbar)$ is one
choice of Nussbaum-type gains
4) The proposed function $\mathcal{G}_N(\hbar)$ belongs to one
choice of Ryan-type Nussbaum gains
Proof.
1) From the definition of (3),we obtain that
| $ \begin{align} &\mathcal{G}_N(-\hbar)=-\exp\left({\frac{(-\hbar)^2}{2}}\right)\left((-\hbar)^2+2\right)\sin(-\hbar)\\ &\quad =-\mathcal{G}_N(\hbar).\end{align} $ | (4) |
Therefore,it is derived that the proposed Nussbaum gain is an odd function. As an immediate result,its integration is an even function.
2) Utilizing the integration theorem and the definition (3),we can derive that
| $ \begin{align} \mathcal{G}_T(\hbar)=\exp\left({\frac{\hbar^2}{2}}\right)\left(\cos(\hbar)-\hbar\sin(\hbar)\right)-1.\end{align} $ | (5) |
Hence,the minimal and maximal values of $\mathcal{G}_T(\hbar)$ over the interval $\hbar\in[0,2k\pi+\pi]$ are derived at $\hbar=2k\pi+\pi$ and $\hbar=2k\pi$,respectively. Immediately,its minimum and maximum can be computed as $\mathcal{G}_{T_{\rm min}}=\mathcal{G}_T(2k\pi+\pi)=-\exp\left({\frac{(2k\pi+\pi)^2}{2}}\right)-1$ and $\mathcal{G}_{T_{\rm max}}=\mathcal{G}_T(2k\pi)=\exp\left({\frac{(2k\pi)^2}{2}}\right)-1$, respectively.
3) From the result in Proposition 1-2),the minimal and maximum values of $\mathcal{G}_T(\hbar) $ over the interval $[2k\pi$, $2k\pi+\pi]$ can be obtained at $\hbar=2k\pi+\pi$ and $\hbar=2k\pi$, respectively. Hence,Proposition 1.3) can be proved if following two relations are satisfied: $\lim\nolimits_{k\rightarrow+\infty}{\sup\int_0^{2k\pi}{\mathcal{G}_N(\chi){\rm d}\chi}}=+\infty$; and $\lim\nolimits_{k\rightarrow+\infty}{\inf\int_0^{2k\pi+\pi}{\mathcal{G}_N(\chi){\rm d}\chi}}=-\infty$. To prove the former,the integration $\int_0^{2k\pi}{\mathcal{G}_N(\chi){\rm d}\chi}$ can be computed directly from (5) as $\int_0^{2k\pi}{\mathcal{G}_N(\chi){\rm d}\chi}=\exp\left({\frac{(2k\pi)^2}{2}}\right)-1$. As $k$ approaches infinity,it yields $\lim_{k\rightarrow+\infty}{\sup\left\{\int_0^{2k\pi}{\mathcal{G}_N(\chi){\rm d}\chi}\right\}}=+\infty$. Similarly,we have $\lim_{k\rightarrow+\infty}{\inf\left\{\int_0^{2k\pi+\pi}{\mathcal{G}_N(\chi){\rm d}\chi}\right\}}=-\infty$.
4) There exists an increasing sequence $\{\hbar_k\}$ satisfying $\hbar_k=2k\pi$,where $\hbar_k$ approaches infinity as $k$ approaches infinity. Therefore,the following inequality holds ${\sup\left\{\frac{1}{\hbar}\int_0^\hbar{\mathcal{G}_N(\chi){\rm d}\chi}\right\}} \geq {{\frac{1}{\hbar_k}\int_0^{\hbar_k}{\mathcal{G}_N(\chi){\rm d}\chi}}}$. As proofed in Proposition 1.1)-3), ${\int_0^{2k\pi}{\mathcal{G}_N(\chi){\rm d}\chi}}=\mathcal{G}_T(2k\pi)=\exp\left({\frac{(2k\pi)^2}{2}}\right)-1$. As $k$ increases,the term $ \exp\left({\frac{(2k\pi)^2}{2}}\right)-1$ increases faster than the term $2k\pi$ does. Moreover,as $k $ approaches infinity,it yields $\lim_{k\rightarrow+\infty}{\left\{\frac{\exp\left({\frac{(2k\pi)^2}{2}}\right)-1}{2k\pi}\right\}}=+\infty$. Therefore,it yields that $\lim_{\hbar\rightarrow+\infty}{\sup\left\{\frac{1}{\hbar}\int_0^\hbar{\mathcal{G}_N(\chi){\rm d}\chi}\right\}}=+\infty$. As a similar result of above equation,we have an increasing sequence $\{\hbar_k'\}$ which satisfies $\hbar_k'=2k\pi+\pi$,where $\hbar_k'$ approaches infinity as $k$ approaches infinity. The following inequality holds ${\inf\left\{\frac{1}{\hbar}\int_0^\hbar{\mathcal{G}_N(\chi){\rm d}\chi}\right\}}\leq {\left\{\frac{\int_0^{2k\pi+\pi}{\mathcal{G}_N(\chi){\rm d}\chi}}{2k\pi+\pi}\right\}}$. Since $\lim_{k\rightarrow+\infty}{\left\{\frac{-\exp\left({\frac{(2k\pi+\pi)^2}{2}}\right)-1}{2k\pi+\pi}\right\}}=-\infty$, we obtain that $ \lim_{\hbar\rightarrow+\infty}{\inf\left\{\frac{1}{\hbar}\int_0^\hbar{\mathcal{G}_N(\chi){\rm d}\chi}\right\}}=-\infty. $
Having seen $\mathcal{G}_N(\hbar)$'s important properties in Proposition 1,we will not only tackle the control problem from multiple Nussbaum gains coexisting in one Lyapunov function candidate,but also remove the limitation of the prior knowledge of varying parameters' upper and lower bounds. The main result is summarized as Theorem 1.
Theorem 1. Suppose that the time-varying function ${\vartheta}_i(t)$ is defined in an unknown closed interval $\nabla=[{\vartheta}^{-},{\vartheta}^{+}]$ with $0\notin \nabla$, ${\vartheta}^{-}:= \min\nolimits_{1\leq i\leq L}\{{\vartheta}_{i}(t)\}$ and ${\vartheta}^{+}:=\max\nolimits_{1\leq i\leq L}\{{\vartheta}_{i}(t)\}$. Let $V(t,x(t))$ be a smooth positive definite function defined on the time interval $[0,t_f)$. $\hbar_i(t)$ is designed as a smooth function with $\hbar_i(0)$ being bounded for $i=1,2,... ,n$. Define $\eta_i$ and $\varpi$ to be known constants. If the following inequality holds:
| $ \begin{array}{l} V(t,x(t)) \le \\ \;\;\int_0^t {\sum\limits_{i = 1}^L {\left[ {{\vartheta _i}(\chi ){g_N}({\hbar _i}(\chi )) + {\eta _i}} \right]{{\dot \hbar }_i}(\chi ){\rm{d}}\chi } } + \varpi , \end{array} $ |
then the conclusion is drawn that $\hbar_i(t)$, $V(t,x(t))$ and ${{\vartheta}_i(t)\mathcal{G}_N(\hbar_i(t))\dot \hbar_i(t)}$ must be bounded on $[0,t_f)$ for $i=1,... ,L$.
Proof.
Now that the above inequality holds over the time interval $[0, t_f)$,it is thus derived that the following constraint holds
| $ \begin{align}&V(t,x(t))\leq\ \sum_{i=1}^{L}\int_0^{\hbar_i(\chi)}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi}\\ &\quad +\sum_{i=1}^{L}{\eta_i\hbar_i(t)}+\varpi_1,\end{align} $ | (6) |
where the bounded variable $\varpi_1$ is defined as $\varpi_1=\sum_{i=1}^{L}\int_{\hbar_i(0)}^0{{\vartheta}_i(\chi) \mathcal{G}_N(\chi){\rm d}\chi}-\sum_{i=1}^{L}{\eta_i\hbar_i(0)}+\varpi$. The remaining proof is accomplished by seeking a contradiction. In what follows, some $\hbar_i(t)$ are supposed to be bounded,but some are unbounded over $[0,t_f)$ for $i=1,... ,L$. Hence,we have $\hbar_1(t), ... ,\hbar_\xi(t) $ are unbounded for $1\leq \xi \leq L$, meanwhile $\hbar_{\xi+1}(t),... ,\hbar_L(t)$ remain bounded. Considering each actuator has an unknown identical control direction,the contradiction is,therefore,carried out into following two cases.
Case 1. Each actuator has a positive control sign.
$\{t_k\}$ is defined as $t_k = \min\{t:|\hbar_i(t)|=2k\pi+\pi\ |\ {1\leq i\leq \xi}\}$.
When $k\rightarrow\infty$,it is obtained that $t_k \rightarrow
t_f$. The reason is presented as follows. The smooth function
$\hbar_i(t)$ is assumed to be unbounded on $[0,t_f)$ for $1\leq
i\leq \xi$. When $k\rightarrow\infty$,it is obtained that
$\hbar_i(t)=2k\pi+\pi$ must approach the infinity (or
$\hbar_i(t)=2k\pi+\pi$ must be unbounded). Therefore,$t$ is
approaching $t_f$ if $\hbar_i(t)$ is unbounded. Moreover,
recalling the definition of $t_k$,we have $t_k\rightarrow t_f $ as
$t\rightarrow t_f$. As a result,the conclusion is obtained that
when $k\rightarrow\infty$,it is obtained that $t_k\rightarrow
t_f$. A similar result has been obtained in
| $ \begin{align} &V(t_k,x(t_k))\\ &\leq\sum_{i=1,i\neq i'_k}^{\xi}\int_0^{\hbar_i(t_k)}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi}+\sum_{i=1}^{\xi}{\eta_i\hbar_i(t_k)}\\ &+\int_0^{\hbar_{i'_k}(t_k)}{ {\vartheta}_{i'_k}(\chi)\mathcal{G}_N(\chi){\rm d}\chi}+\sum_{i=\xi+1}^{L}{\eta_i\hbar_i(t_k)} \\ & +\sum_{i=\xi+1}^{L}\int_0^{\hbar_i(t_k)}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi}+\varpi_1. \end{align} $ | (7) |
Utilizing results in Proposition 1,one obtains that the maximum value of $\mathcal{G}_T(\hbar_i(k))$ over $\hbar_i(k)\in[0,2k\pi+\pi] $ is obtained at $\hbar_i(k)=2k\pi$. Moreover,$\mathcal{G}_N(\hbar_i(k))$ must be non-negative over $\hbar_i(k)\in[2k\pi-\pi,\ 2k\pi]$. As a result of this property, $\sum_{\{i=1,i\neq i'_k\}}^{l}\int_0^{\hbar_i(t)}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi}$ in (7) can be further reformulated as:
| $ \begin{align} \label{eq2npi-pi} \sum_{i=1,i\neq i'_k}^{\xi}\int_0^{2k\pi}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi} \leq &\ \bar{\vartheta}_{\xi}\int_{2k\pi-\pi}^{2k\pi}{ \mathcal{G}_N(\chi){\rm d}\chi} \\ &+\sum_{i=1,i\neq i'_k}^{\xi}\int_0^{2k\pi-\pi}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi}.\end{align} $ | (8) |
where $\bar{\vartheta}_{\xi}={\vartheta}_{max}(\xi-1)$. Considering the fact that $|\hbar_{i'_k}(t_k)|=2k\pi+\pi$,$1\leq i'_k \leq \xi$,it is thus derived that the remaining analyses should be decomposed into two subcases. That is, $\hbar_{i'_k}(t_k)=2k\pi+\pi$ and $\hbar_{i'_k}(t_k)=-2k\pi-\pi$.
Subcase 1. $\hbar_{i'_k}(t_k)=2k\pi+\pi$. Consequently,the term $\int_0^{\hbar_{i'_k}(t_k)}{ {\vartheta}_{i'_k}(\chi)\mathcal{G}_N(\chi){\rm d}\chi}$ at right hand of (7) is changed into
| $ \begin{align} \label{eq2npi} &\int_0^{\hbar_{i'_k}(t)}{ {\vartheta}_{i'_k}(\chi)\mathcal{G}_N(\chi){\rm d}\chi} \\ &~~~= \int_0^{2k\pi-\pi}{ {\vartheta}_{i'_k}(\chi)\mathcal{G}_N(\chi){\rm d}\chi}+ \int_{2k\pi-\pi}^{2k\pi}{ {\vartheta}_{i'_k}(\chi)\mathcal{G}_N(\chi){\rm d}\chi} \\ &~~~+ \int_{2k\pi}^{2k\pi+\pi}{ {\vartheta}_{i'_k}(\chi)\mathcal{G}_N(\chi){\rm d}\chi}. \end{align} $ | (9) |
As an immediate result of Proposition 1,it is obtained that $\mathcal{G}_N(\hbar_i(k))\leq0$ holds when $\hbar_i(k)$ belongs to the interval $[{2k\pi},{2k\pi+\pi}]$. Therefore, $\int_0^{\hbar_{i'_k}(t)}{ {\vartheta}_{i'_k}(\chi)\mathcal{G}_N(\chi){\rm d}\chi}$ in (9) can be rewritten as
| $ \begin{align} \label{eq2npi2} &\int_{2k\pi-\pi}^{2k\pi}{ {\vartheta}_{i'_k}(\chi)\mathcal{G}_N(\chi){\rm d}\chi}+ \int_{2k\pi}^{2k\pi+\pi}{ {\vartheta}_{i'_k}(\chi)\mathcal{G}_N(\chi){\rm d}\chi}\\ &~~~ \leq\ {\vartheta}_{\rm max}\int_{2k\pi-\pi}^{2k\pi}{ \mathcal{G}_N(\chi){\rm d}\chi}+ {\vartheta}_{\rm min}\int_{2k\pi}^{2k\pi+\pi}{ \mathcal{G}_N(\chi){\rm d}\chi}.\end{align} $ | (10) |
Based on results in (8) -- (10),(7) can be reformulated as
| $ \begin{align} &V(t_k,x(t_k))\\ &~~\leq\ \xi{\vartheta}_{\rm max}\int_{2k\pi-\pi}^{2k\pi}{ \mathcal{G}_N(\chi){\rm d}\chi}+ {\vartheta}_{\rm min}\int_{2k\pi}^{2k\pi+\pi}{ \mathcal{G}_N(\chi){\rm d}\chi}+\\ &~~\varpi_2+\sum_{i=1}^{\xi}\int_0^{2k\pi-\pi}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi}+\sum_{i=1}^{\xi}{\eta_i\hbar_i(t_k)},\end{align} $ | (11) |
where $\varpi_2=\sum_{i=\xi+1}^{L}\int_0^{\hbar_i(t_k)}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi}+\varpi_1+\sum_{i=\xi+1}^{L}{\eta_i\hbar_i(t_k)}$. When $i$ is chosen as $\xi+1\leq i\leq L$,both $\int_0^{\hbar_i(t_k)}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi}$ and $\hbar_i(t_k)$ are bounded. Hence,it is obtained that $\sum_{i=\xi+1}^{L}\int_0^{\hbar_i(t_k)}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi}$ and $\sum_{i=\xi+1}^{L}{\eta_i\hbar_i(t_k)}$ must be bounded. As an immediate result,$\varpi_2$ is also bounded. After applying the definition of $\mathcal{G}_T(\hbar)$ in (5),one can change (11) into
| $ \begin{align} &V(t_k,x(t_k)) \\ &~~~\leq -\xi{\vartheta}_{\rm max}\mathcal{G}_T(2k\pi-\pi)- {\vartheta}_{\rm min}\mathcal{G}_T(2k\pi)\\ &~~~+ \xi{\vartheta}_{\rm max} \mathcal{G}_T(2k\pi) +{\vartheta}_{\rm min} \mathcal{G}_T(2k\pi+\pi)+\sum_{i=1}^{\xi}{\eta_i\hbar_i(t_k)}\\ &~~~ +\sum_{i=1}^{\xi}\int_0^{2k\pi-\pi}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi}+\varpi_2.\end{align}c $ | (12) |
Employing the definition of $t_k$,one obtains that $|\hbar_i(t_k)|\leq 2k\pi+\pi$ holds for $1\leq i\leq \xi$. Subsequently,the following constraint must hold $\sum_{i=1}^{\xi}{\eta_i\hbar_i(t)}\leq 2\bar\eta {\xi}k\pi+\bar\eta\xi\pi$,where $\bar\eta$ denotes the maximum value of $|\eta_i|$ for $1\leq i\leq \xi$. $\big\{\xi{\vartheta}_{\rm max} \mathcal{G}_T(2k\pi)+{\vartheta}_{\rm min} \mathcal{G}_T(2k\pi+\pi)+\sum_{i=1}^{\xi}{\eta_i\hbar_i(t)}\big\}$ in (12) is rewritten as
| $ \begin{align} &\xi{\vartheta}_{\rm max} \mathcal{G}_T(2k\pi)+{\vartheta}_{\rm min} \mathcal{G}_T(2k\pi+\pi)+\sum_{i=1}^{\xi}{\eta_i\hbar_i(t_k)} \\ &~~~\leq -{{\vartheta}_{\rm min}}\left[\exp\left({\frac{(2k\pi+\pi)^2}{2}}\right)-1\right]\\ &~~~+\xi{\vartheta}_{\rm max}\left(\exp\left({\frac{(2k\pi)^2}{2}}\right)-1\right) +2\bar\eta {\xi}k\pi+\bar\eta\xi\pi \\ &~~~= -\exp\left({\frac{\left(2k\pi\right)^4}{2}}\right) \left[{{\vartheta}_{\rm min}}\exp\left({\frac{\pi(4k\pi+\pi)}{2}}\right)-\xi{\vartheta}_{\rm max}\right] \\ &~~~+{{\vartheta}_{\rm min}}-\xi{\vartheta}_{\rm max}+2\bar\eta {\xi}k\pi+\bar\eta\xi\pi.\end{align} $ | (13) |
where the definition of $\mathcal{G}_T(\hbar)$ in (5) is employed. Moreover,as $\exp\left({\frac{\pi(4k\pi+\pi)}{2}}\right)$ in (13) will dominate any bounded functions with a sufficiently large $k$, the sign of $\Big\{{{\vartheta}_{\rm min}}\exp\left({\frac{\pi(4k\pi+\pi)}{2}}\right)-\xi{\vartheta}_{\rm max}\Big\}$ is thus negative as $k$ approaches $\infty$. Therefore,the following constraint must hold
| $ \begin{align} \label{eqkankan1} \Big\{\xi{\vartheta}_{\rm max} \mathcal{G}_T(2k\pi)+{\vartheta}_{\rm min} \mathcal{G}_T(2k\pi+\pi)+2\bar\eta {\xi}k\pi\Big\} \rightarrow-\infty,\end{align} $ | (14) |
when $k $ approaches infinity. Similarly,the first two terms at the right hand of (12) also satisfy
| $ \begin{align} &\Big\{-\xi{\vartheta}_{\rm max}\mathcal{G}_T(2k\pi-\pi)- {\vartheta}_{\rm min}\mathcal{G}_T(2k\pi)\Big\} \\ &~~~= -\exp\left({\frac{(2k\pi)^2}{2}}\right)\left[{{\vartheta}_{\rm min}} \exp\left({\frac{\pi(4k\pi-\pi)}{2}}\right)-\xi{\vartheta}_{\rm max}\right]\\ &~~~ +{{\vartheta}_{\rm min}}+\xi{\vartheta}_{\rm max}. \end{align} $ | (15) |
Similar to (14),(15) is thus changed into
| $ \begin{align} &\Big\{-\xi{\vartheta}_{\rm max}\mathcal{G}_T(2k\pi-\pi)- {\vartheta}_{\rm min}\mathcal{G}_T(2k\pi)\Big\} \rightarrow-\infty,\end{align} $ | (16) |
where $k \rightarrow \infty$.
Combining results in (14) and (16),one obtains that the following property holds
| $ \begin{align}\label{eqNussbaum6} &\Big\{ \ \xi{\vartheta}_{\rm max} \mathcal{G}_T(2k\pi)+{\vartheta}_{\rm min} \mathcal{G}_T(2k\pi+\pi)-\xi{\vartheta}_{\rm max}\mathcal{G}_T(2k\pi-\pi)\\ &~~~- {\vartheta}_{\rm min}\mathcal{G}_T(2k\pi)+\sum_{i=1}^{\xi}{\eta_i\hbar_i(t_k)}+\varpi_2\ \Big\}\rightarrow-\infty,\end{align} $ | (17) |
where $k \rightarrow \infty$. Moreover, $\sum_{i=1}^{\xi}\int_0^{2k\pi-\pi}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi}$ at the right hand of (12) can be reformulated as
| $ \begin{align}&\sum_{i=1}^{\xi}\int_0^{2k\pi-\pi}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi}\\ &~~~=\ \sum_{i=1}^{\xi}\int_0^{\pi}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi} +\sum_{i=1}^{\xi}\int_{\pi}^{3\pi}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi} \\ &~~~ + ... +\sum_{i=1}^{\xi}\int_{2k\pi-3\pi}^{2k\pi-\pi}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi}. \end{align} $ | (18) |
Considering the fact that $\mathcal{G}_N(\chi) < 0$ over the interval (0,$\pi$) and $\mathcal{G}_N(0)=0$,it is thus derived that $\int_0^{\pi}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi} < 0$. From observation of (18),each new element $\sum_{i=1}^{\xi}\int_{2k\pi-3\pi}^{2k\pi-\pi}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi}$ is thus added to $\sum_{i=1}^{\xi}\int_0^{2k\pi-\pi}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi}$ as the positive integer $k$ increases. Therefore,the sign of $\sum_{i=1}^{\xi}\int_0^{2k\pi-\pi}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi}$ can be determined if the sign of $\sum_{i=1}^{\xi}\int_{2k\pi-3\pi}^{2k\pi-\pi}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi}$ is determined. By decomposing the interval [$2k\pi-3\pi$,$2k\pi-\pi$] into [$2k\pi-3\pi$,$2k\pi-2\pi$] $\bigcup$ [$2k\pi-2\pi$, $2k\pi-\pi$],one obtains that $\sum_{i=1}^{\xi}\int_{2k\pi-3\pi}^{2k\pi-\pi}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi}$ is changed into
| $ \begin{array}{l} \sum\limits_{i = 1}^\xi {\int_{2k\pi - 3\pi }^{2k\pi - \pi } {{\vartheta _i}(\chi ){g_N}(\chi ){\rm{d}}\chi } } \\ \;\; \le \xi {\vartheta _{{\rm{max}}}}\int_{2k\pi - 3\pi }^{2k\pi - 2\pi } {{g_N}(\chi ){\rm{d}}\chi } + \xi {\vartheta _{{\rm{min}}}}\int_{2k\pi - 2\pi }^{2k\pi - \pi } {{g_N}(\chi ){\rm{d}}\chi } . \end{array} $ |
Employing similar analysis as in (13)-(17),one can conclude that when $k$ approaches $\infty$,the newly added element $\sum_{i=1}^{\xi}\int_{2k\pi-3\pi}^{2k\pi-\pi}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi}$ approaches $-\infty$. Subsequently,it is derived that the following constraint must hold
| $\begin{align}\sum_{i=1}^{\xi}\int_0^{2k\pi-\pi}{ {\vartheta}_i(\chi)\mathcal{G}_N(\chi){\rm d}\chi}\rightarrow-\infty\ \ {\rm as}\ \ k \rightarrow \infty. \end{align} $ | (19) |
At this stage,$V(t_k,x(t_k))$ can be further rewritten as follows by combining results in (12)-(19):
| $ \begin{align}\label{eqNussbaum8} &V(t_k,x(t_k))\leq\ \ \Big\{\sum_{i=1}^{L}\int_0^{t_k}{{\vartheta}_i(\chi)\mathcal{G}_N(\hbar_i(\chi))\dot \hbar_i(\chi){\rm d}\chi} \\ &~~~+\sum_{i=1}^{L}\int_0^{t_k}{\eta_i\dot \hbar_i(\chi){\rm d}\chi}+\varpi\Big\} \rightarrow-\infty. \end{align} $ | (20) |
From the observation of (20),it is easy to obtain that a contradiction is generated. Therefore,all of $\hbar_i(t)$ for $1\leq i\leq L$ is bounded over $[0,t_f)$. Thus,$V(t,x(t))$ and $\sum_{i=1}^{L}\int_0^t{{\vartheta}_i(t)\mathcal{G}_N(\hbar_i(t))\dot \hbar_i(t) {\rm d} t}$ are also bounded over $[0,t_f)$.
Subcase 2. $\hbar_{i'_k}(t_k)=-2k\pi$. It is noted that the investigated Nussbaum gain is defined as an odd function (see Proposition 1). Therefore, the proof of Subcase 2 can be easily obtained based on the procedure of Subcase 1. Hence,Subcase 2 is omitted here.
Case 2. Each actuator has a negative sign.
Here,$\{t_k\}$ is redefined as $ t_k = \min\{t:|\hbar_i(t)|=2k\pi+2\pi\ | \ {1\leq i\leq \xi}\}, $ where $t_k \rightarrow t_f$ as $k\rightarrow\infty$. Using the similar technique developed in Case 1,one obtains that the remaining proof of Case 2 can be derived.
Ⅳ. ADAPTIVE CONTROLLER DESIGN AND ITS STABILITY ANALYSIS A. Controller DesignEmploying the control design in
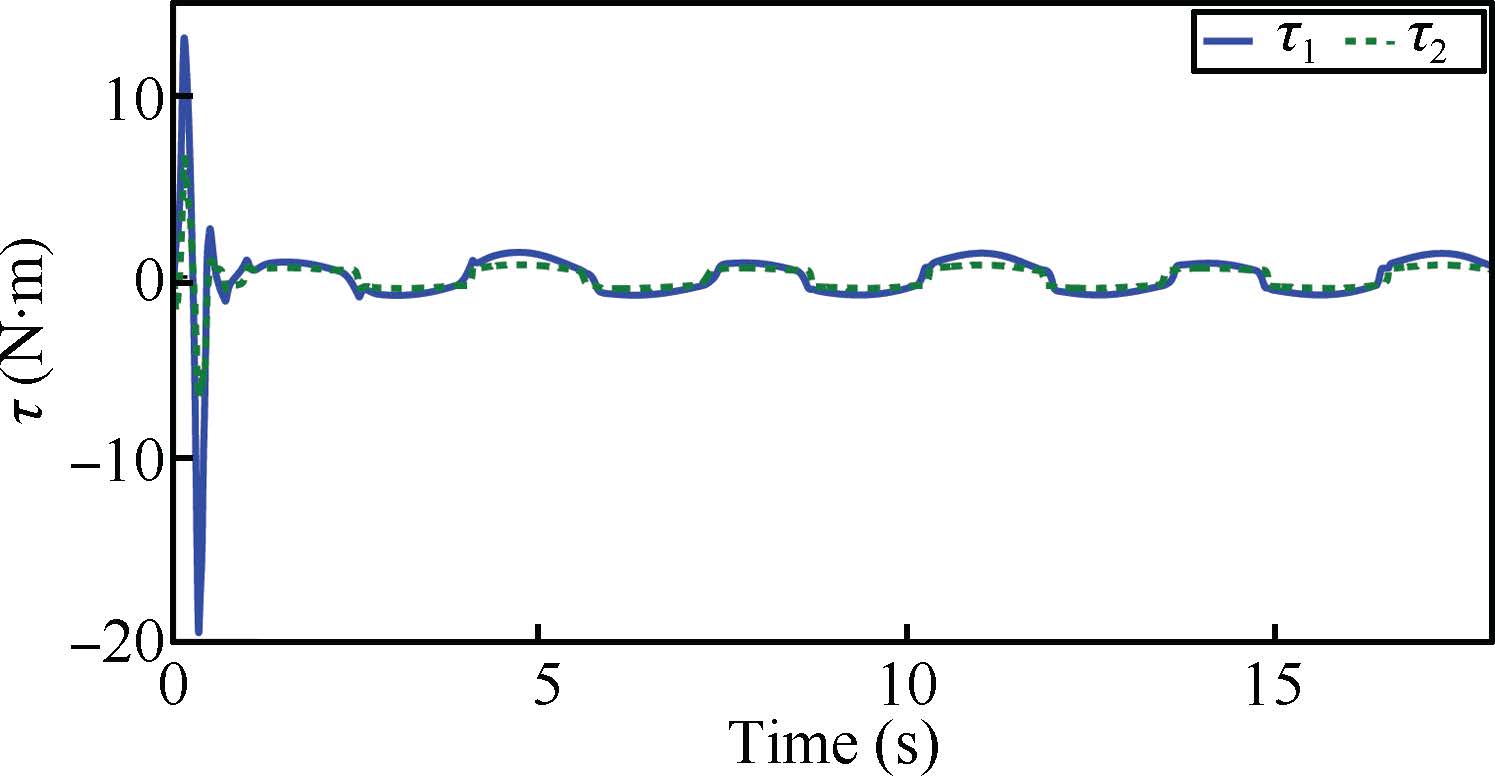
| $ \begin{align}\label{eqcontroller} \tau =-\overline{\mathcal{G}}_N(\hbar(t))\bar \tau, \end{align} $ | (21) |
where the vector $\hbar(t)$ is defined as $\hbar(t)=[\hbar_1(t),... ,\hbar_L(t)]^{\rm T}$; Nussbaum gain matrix $\overline{\mathcal{G}}_N(\hbar(t))$ is defined as $\overline{\mathcal{G}}_N(\hbar(t))={\rm diag}[\mathcal{G}_N(\hbar_1(t)),... , \mathcal{G}_N(\hbar_L(t))]$; and $ \bar \tau$ denotes a virtual controller. In particular,the virtual controller is given as
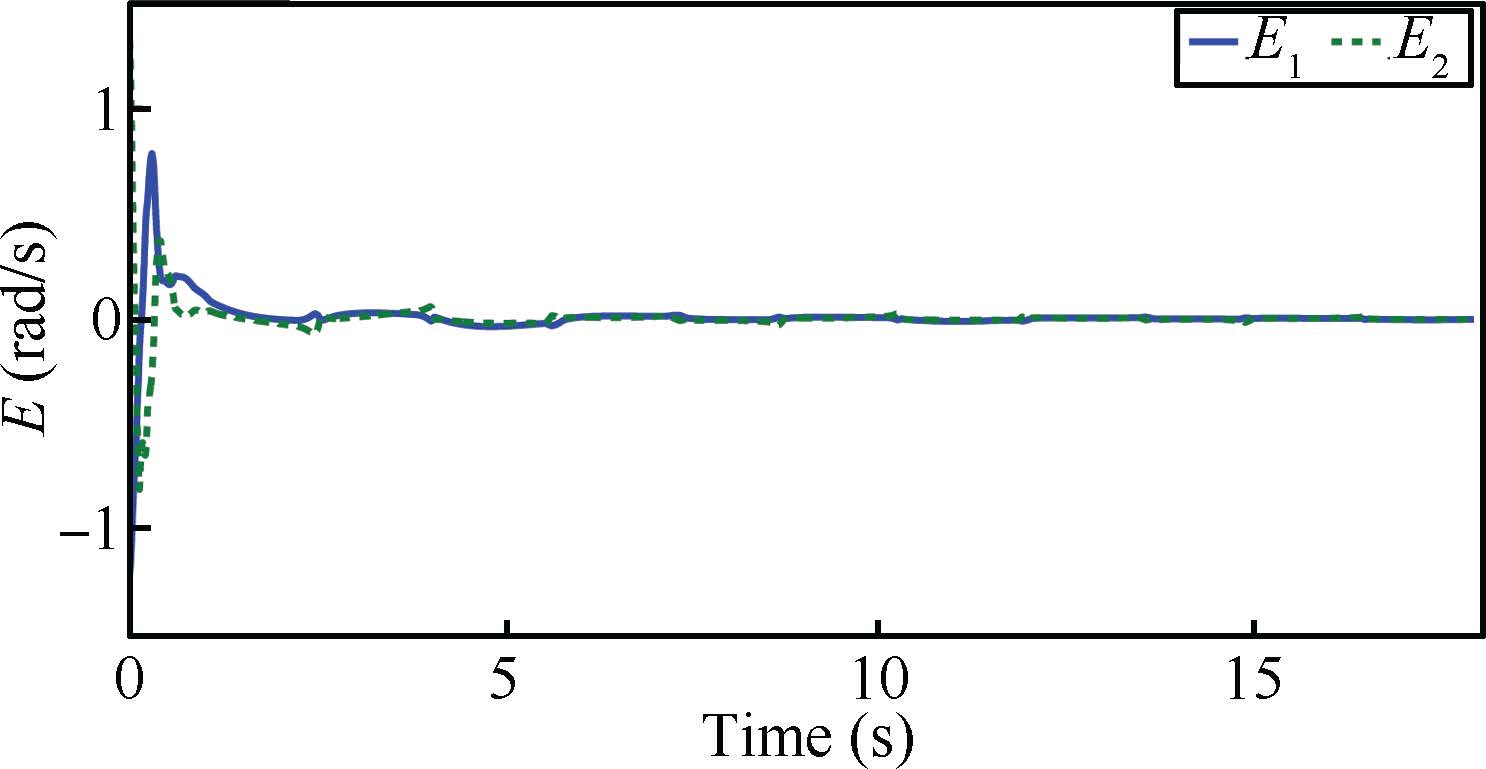
| $ \begin{align}\label{eqaux} \bar \tau=\Theta(r,\dot r,\dot r_e,\ddot r_e)\hat\aleph-\varphi E-\hat K_r\mbox{Tanh}({E}/{s_t}), \end{align} $ | (22) |
where $\hat\aleph$ is the estimate of $\aleph$; $\varphi$ is a positive definite matrix; Hyperbolic tangent function $\mbox{Tanh}({E}/{s_t})$ is designed as $\mbox{Tanh}({E}/{s_t})={\rm diag}[\tanh({s_1}/{s_t}),... ,\tanh({s_L}/{s_t})]$ with $s_t={1}/{(1+t^2)}$; and $\hat K_r $ is the estimate of $K_r$. $ \hbar(t)$ in $\mathcal{G}_N(\hbar(t))$ is updated by:
| $ \begin{align}\label{equpdate1} \dot \hbar(t)= -{\rm diag}(\beta) {\rm diag}(E)\bar \tau, \end{align} $ | (23) |
where the positive definite diagonal matrix ${\rm diag}(\beta)$ is designed as ${\rm diag}(\beta)={\rm diag}(\beta_{1},... ,\beta_{L})$; and the matrix ${\rm diag}(E) $ is defined as ${\rm diag}(E)={\rm diag}[E_1,... ,E_L]$. The adaptive parameters $\hat\aleph$ and ${\hat K}_r$ in the virtual controller (22) are updated by
| $ \begin{align}{{\dot {\hat K}_r}} = E^{\rm T}\mbox{Tanh}({E}/{s_t}),\label{equpdate3} \end{align} $ | (24) |
| $ \begin{align} \dot {\hat {\aleph}} = -\Psi^{-1}\Theta^{\rm T}(r,\dot r,\dot r_e,\ddot r_e)E,\label{equpdate2}\end{align} $ | (25) |
where the matrix $\Psi$ is positive definite; and $\Theta(r,\dot r,\dot r_e,\ddot r_e)$ is the regression matrix.
B.Stability AnalysisTheorem 2. Given the mechanical system (1),the controller (21) and adaptive laws (23) - (25) ensure the asymptotic convergence of the system output.
Proof.
Construct a Lyapunov candidate as
| $ \begin{align} V(t) = \frac{1}{2}E^{\rm T} {W} (r )E +\frac{1}{2}\tilde{\aleph}^{\rm T}\Psi\tilde{\aleph}+\frac{1}{2}\tilde{K}_r^{\rm T}\tilde{K}_r, \end{align} $ | (26) |
where $\tilde{\aleph}=\hat\aleph-\aleph$. Taking the time derivation of (26),one has
| $ \begin{align} \dot V(t) = E^{\rm T} {W} (r )\dot E +\frac{1}{2}E^{\rm T} \dot{W} (r )E +\dot{\hat\aleph}^{\rm T}\Psi\tilde{\aleph}+\tilde{K}_r^{\rm T}\dot{\hat{K}}_r. \end{align} $ | (27) |
Substituting the system dynamics (1) into (27),we have:
| $ \begin{align*} &\dot V(t) =E^{\rm T}(\vartheta(t)\tau+T)-E^{\rm T} \Theta(r,\dot r,\dot r_e,\ddot r_e)\aleph\\ &~~~-\left(E^{\rm T}{H} (r ,{\dot r } ){\dot E } -\frac{1}{2}E^{\rm T} \dot{W} (r )E\right)\\ &~~~+\dot{\hat\aleph}^{\rm T}\Psi\tilde{\aleph}+\tilde{K}_r^{\rm T}\dot{\hat{K}}_r\\ &~~~=E^{\rm T}\vartheta(t)\tau+E^{\rm T}T-E^{\rm T}\Theta(r,\dot r, \dot r_e,\ddot r_e)\aleph\\ &~~~+\dot{\hat\aleph}^{\rm T}\Psi\tilde{\aleph}+\tilde{K}_r^{\rm T}\dot{\hat{K}}_r, \end{align*} $ |
where the fact that $\big\{2H (r,\dot r )-\dot W (r )\big\}$ is skew-symmetric is employed (see Property 2). From (21) and (28), we have:
| $ \begin{align*} &\dot V(t) =-E^{\rm T}\varphi E+E^{\rm T} \left[T-\hat K_r\mbox{Tanh}({E}/{s_t})\right]\\ &~~~+\tilde{K}_r^{\rm T}\dot{\hat{K}}_r-E^{\rm T}\overline{\mathcal{G}}_N(\hbar(t))\vartheta(t)\bar \tau-E^{\rm T}\bar \tau\\ &~~~+E^{\rm T}\Theta(r,\dot r,\dot r_e,\ddot r_e)\tilde\aleph +\dot{\hat\aleph}^{\rm T}\Psi\tilde{\aleph}. \end{align*} $ |
As an immediate result of (29),we obtain that
| $ \begin{align}\label{V3.1} \dot V(t) \leq&-E^{\rm T}\varphi E+\sum_{i=1}^L0.2785s_tK_{r_i}-E^{\rm T}\bar \tau\\ &-E^{\rm T}\overline{\mathcal{G}}_N(\hbar(t))\vartheta(t)\bar \tau-E^{\rm T}\tilde K_r\mbox{Tanh}({E}/{s_t}) \\ &+E^{\rm T}\Theta(r,\dot r,\dot r_e,\ddot r_e)\tilde\aleph+\tilde{K}_r^{\rm T}\dot{\hat{K}}_r+\dot{\hat\aleph}^{\rm T}\Psi\tilde{\aleph}, \end{align} $ | (28) |
where $|E|^{\rm T}K_r -E^{\rm T} K_r\mbox{Tanh}({E}/{s_t}) < \sum_{i=1}^L0.2785s_tK_{r_i}$ is utilized. Substituting (23)-(25) into (30) leads to
| $ \begin{align}%\label{V31} \dot V(t) \leq\ & -E^{\rm T}\varphi E+\sum_{i=1}^L0.2785s_tK_{r_i}+\sum_{i=1}^{L}{\frac{1}{\beta_i}\dot \hbar_i(t)}\\ &+\sum_{i=1}^{L}{\frac{1}{\beta_i}{\vartheta}_i(t)\mathcal{G}_N(\hbar_i(t))\dot \hbar_i(t)}.\label{V3.1.1} \end{align} $ | (29) |
Taking the integration of (31) over the interval [$0$,$t$] leads to
| $ \begin{align} V(t) \leq&\ -\int_0^tE^{\rm T}\varphi E{\rm d}\chi+\sum_{i=1}^L\int_0^t0.2785s_tK_{r_i}{\rm d}\chi \\ & +\sum_{i=1}^{L}\int_0^t{\frac{1}{\beta_i}\left[{{\vartheta}_i(\chi)}\mathcal{G}_N(\hbar_i(\chi))+1\right]\dot \hbar_i(\chi)}{\rm d}\chi+\varpi_a\\ & \leq\ \sum_{i=1}^{L}\int_0^t{\frac{1}{\beta_i}\left[{{\vartheta}_i(\chi)}\mathcal{G}_N(\hbar_i(\chi))+1\right]\dot \hbar_i(\chi)}{\rm d}\chi+\varpi_b,\label{V4} \end{align} $ | (30) |
where $\varpi_a$ and $\varpi_b=\sum_{i=1}^L\int_0^t0.2785s_tK_{r_i}{\rm d}t+\varpi_a$ are bounded.
After applying Theorem 1 to (32),we have that $\hbar_i(t)$,
$\int_0^t{{\vartheta}_i(t)\mathcal{G}_N(\hbar_i(t))\dot \hbar_i(t)
{\rm d} t}$ and $V(t,x(t))$ are bounded over the time interval $[0,
t_f)$ for $i=1,2,... ,L$. Hence,one has
$t_f\rightarrow\infty$
In what follows,a class of robotic arms are employed to testify
the effectiveness of the proposed method. The dynamics is
described as
| $ \begin{align*} \left[\begin{array}{l} {W_{11}}\quad {W_{12}}\\ {W_{21}}\quad {W_{22}} \end{array} \right] \left[\begin{array}{l} {\ddot r_{1}}\\ {\ddot r_{2}} \end{array} \right]+\left[\begin{array}{l} {H_{11}}\quad {H_{12}}\\ {H_{21}}\quad {H_{22}} \end{array} \right] \left[\begin{array}{l} {\dot r_{1}}\\ {\dot r_{2}} \end{array} \right] =\left[\begin{array}{l} {u_{1}}\\ {u_{2}} \end{array} \right], \end{align*} $ |
where $W_{11}=\aleph_1+2\aleph_3\cos(r_2)$; $W_{12}=W_{21}=\aleph_2+\aleph_3\cos(r_2)+\aleph_4\sin(r_2)$; $W_{22}=\aleph_2$; $H_{11}=-h\dot r_2$; $H_{12}=-h(\dot r_1+\dot r_2)$; $H_{21}=h\dot r_1$; $H_{22}=0$ and $h=\aleph_3\sin(r_2)-\aleph_4\cos(r_2)$ with $\aleph_1= 3.3$, $\aleph_2=0.97$,$\aleph_3=1.04$ and $\aleph_4=0.6$. Actuators nonlinearities are simulated as
| $ \begin{align*} u_i =\left\{ {\begin{array}{llll} (2+0.1\cos(\tau_i))(\tau_i-0.35),& {\rm if}\mbox{ } \tau_i\geq 0.35,\\ 0,\ & {\rm if} \mbox{ } -0.45 < \tau_i < 0.35,\\ (2-0.8\sin(\tau_i))(\tau_i+0.45),&{\rm if} \mbox{ } \tau_i\leq -0.45.\\ \end{array}}\right. \end{align*} $ |
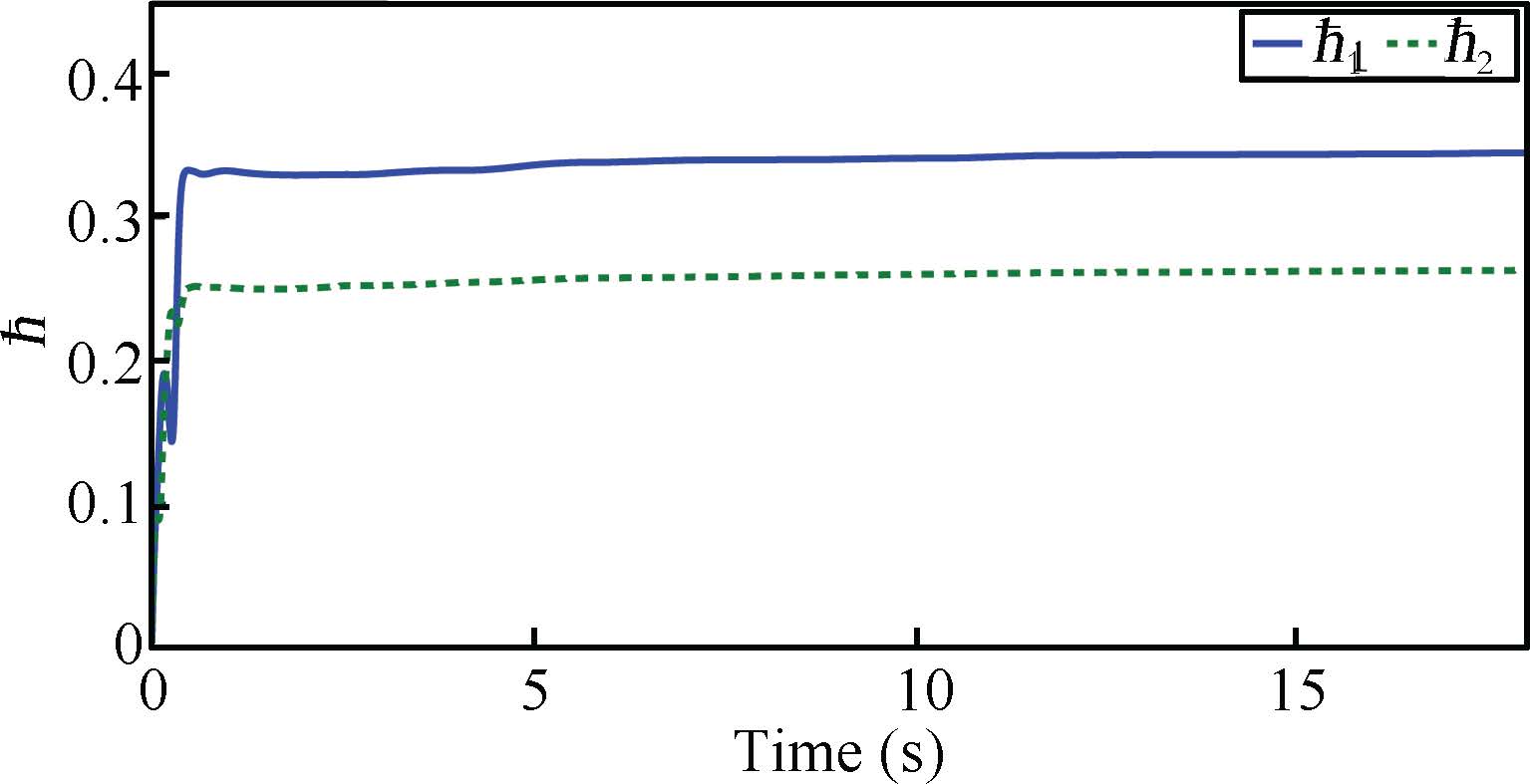
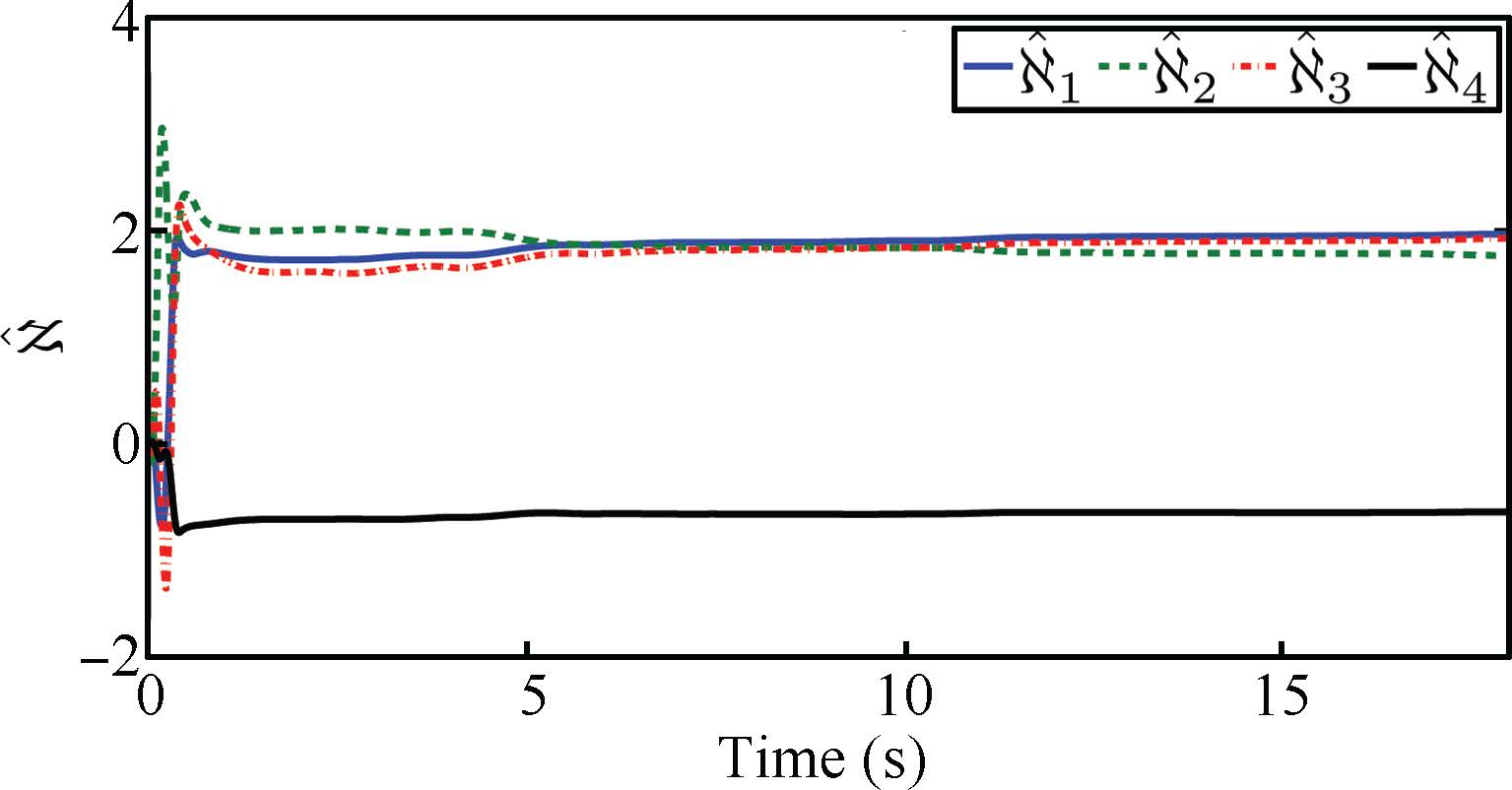
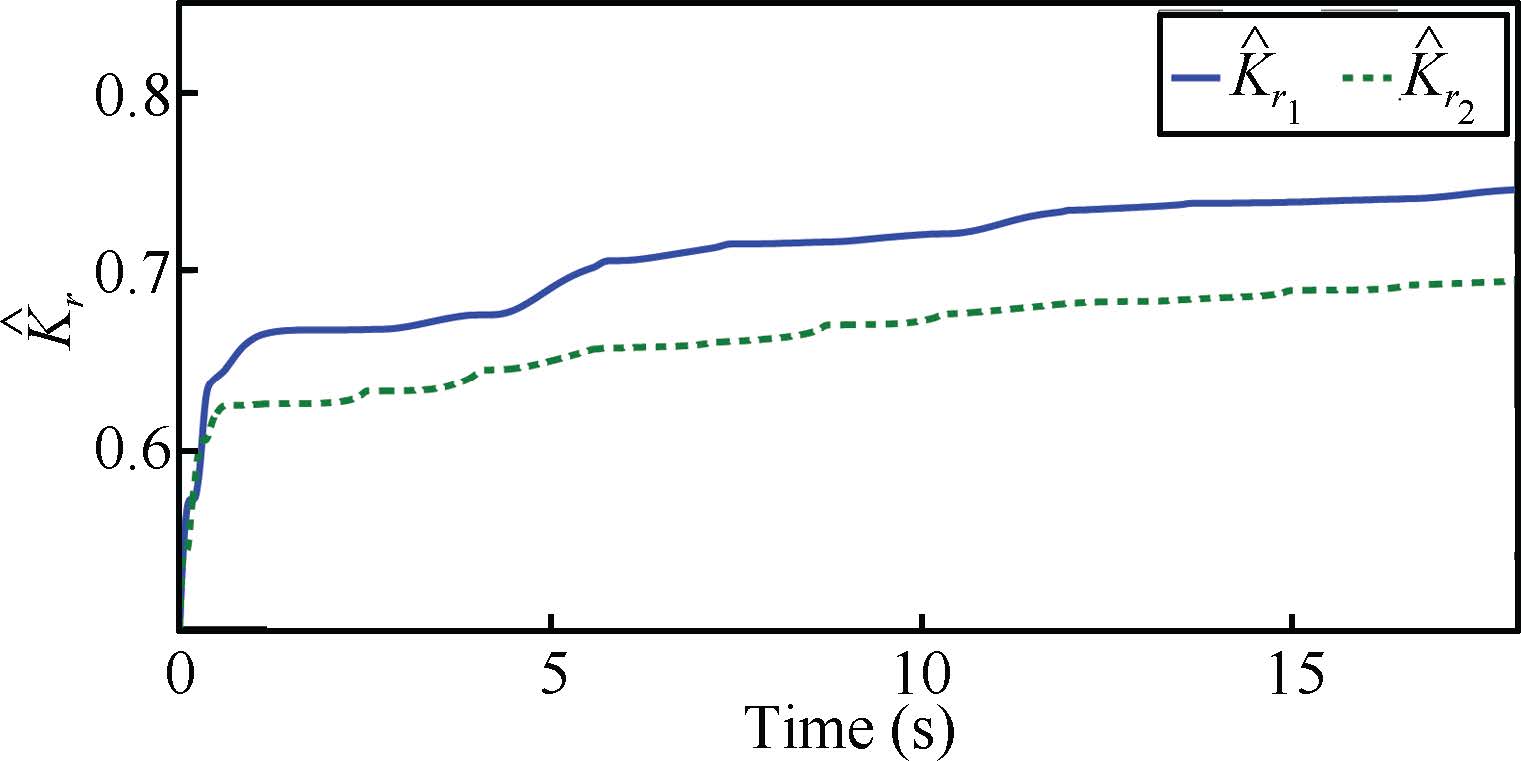
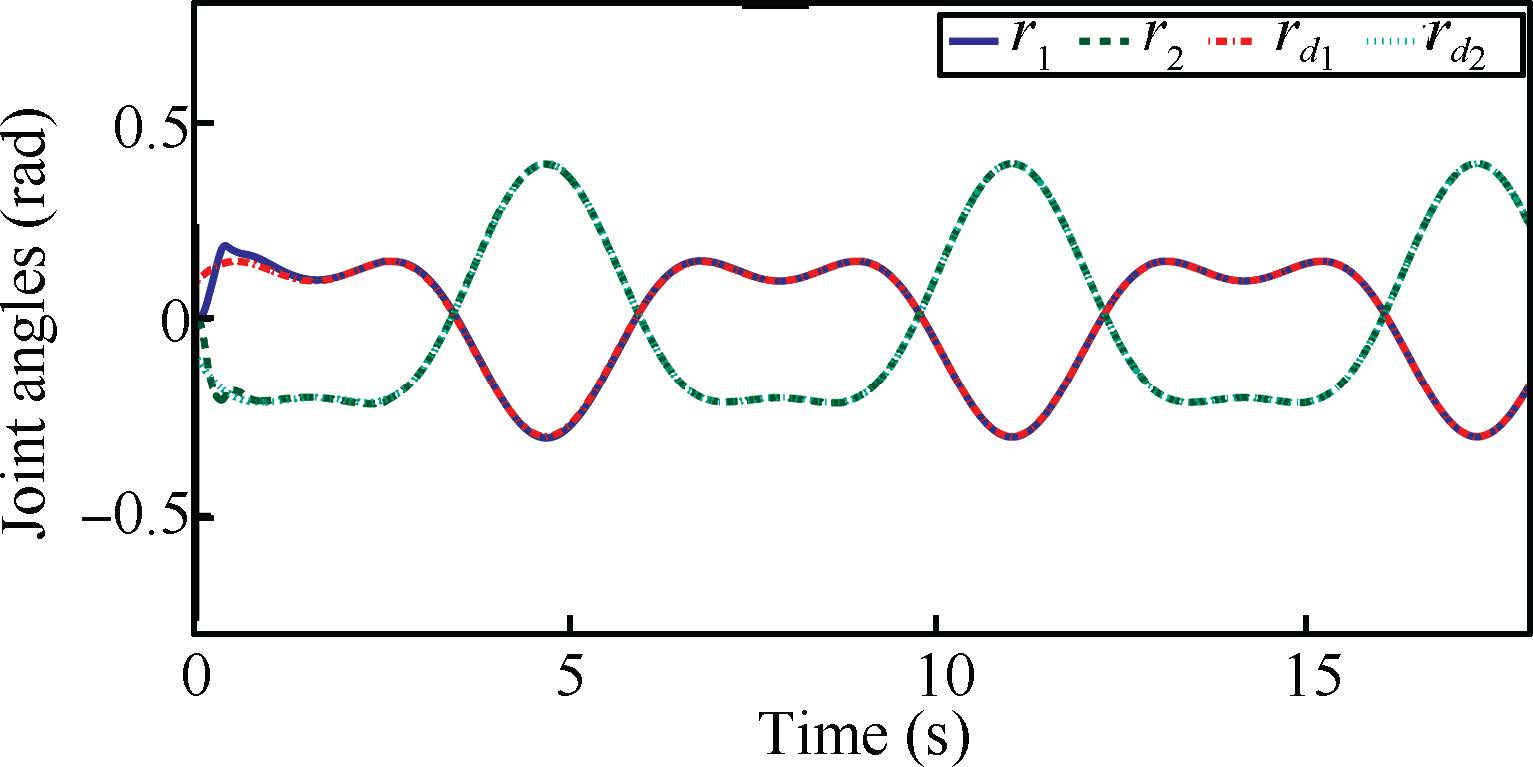
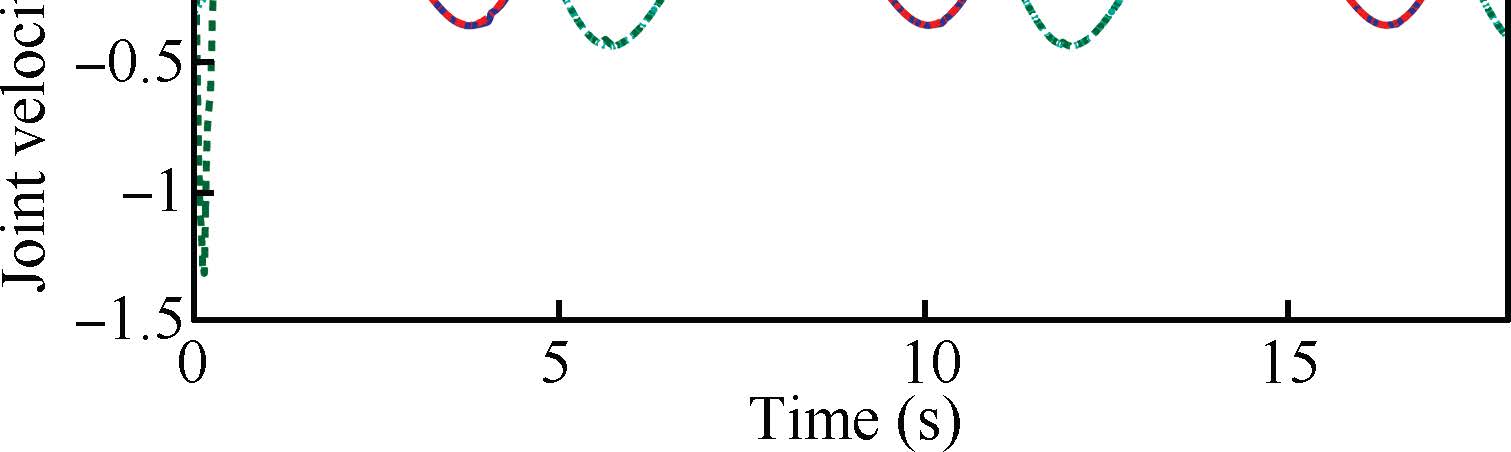
The desired trajectories are given as $ {r_d}(t) = [0.2\sin (t)+0.1\cos (2t),-0.3\sin(t)-0.1\cos(2t)]^{\rm T} {\rm rad}$ and ${\dot r_d}(t) = [0.2\cos (t)-0.2\sin (2t), -0.3\sin(t)+0.2\sin(2t)]^{\rm T} {\rm rad/s.} $ The initial joint angles and velocities are set as $r(0)=[0,0]^{\rm T} {\rm rad}$ and $\dot r(0)=[0,0]^{\rm T} {\rm rad/s}$, respectively. The initial value of $\hat\aleph(t)$ is designed as $\hat\aleph(0)=[0,0]^{\rm T}$. The updating gains $\hbar(t)$ and $K_r(t)$ are set initially as $\hbar(0)=[0,0]^{\rm T}$ and $K_r={\rm diag}[0.5,0.5]$. Gains are designed as $\varphi={\rm diag}[14,14]$,$\Psi={\rm diag}[10,10]$,$\delta={\rm diag}[10,10]$,and ${\rm diag}(\beta)={\rm diag}[0.1,0.1]$.
The simulation results are presented in

|
Download:
|
| Fig. 1. Adaptive parameters: $\hbar $. | |
{kind=link}

|
Download:
|
| Fig. 2. Adaptive parameters: ${\tilde \aleph }$. | |
{kind=link}

|
Download:
|
| Fig. 3. Adaptive parameters: ${{{\hat K}_r}}$. | |
{kind=link}

|
Download:
|
| Fig. 4. Joint angles. | |
{kind=link}

|
Download:
|
| Fig. 5. Joint velocities. | |
{kind=link}

|
Download:
|
| Fig. 6. Filtered tracking errors. | |
{kind=link}

|
Download:
|
| Fig. 7. The designed control law. | |
{kind=link}
This paper has proposed an adaptive method for MIMO mechanical systems with unknown time-varying actuator nonlinearities. A new Nussbaum analysis tool is developed such that the requirement of the prior knowledge of time-varying nonlinearities is successfully removed. It has been theoretically proved that the proposed controller guarantees mechanical systems asymptotically converge to the desired trajectories in the sense of Lyapunov. A simulation example is performed to verify the effectiveness of the proposed approach.
| [1] | Siciliano B, Khatib O. Springer Handbook of Robotics. Berlin Heidelberg:Springer, 2008. |
| [2] | Wang Z L, Wang Q, Dong C Y. Asynchronous H∞ control for unmanned aerial vehicles:switched polytopic system approach. IEEE/CAA Journal of Automatica Sinica, 2015, 2(2):207-216 |
| [3] | Du J L, Yang Y, Wang D H, Guo C. A robust adaptive neural networks controller for maritime dynamic positioning system. Neurocomputing, 2013, 110:128-136 |
| [4] | Peng C, Bai Y, Gong X, Gao Q J, Zhao C J, Tian T T. Modeling and robust backstepping sliding mode control with adaptive RBFNN for a novel coaxial eight-rotor UAV. IEEE/CAA Journal of Automatica Sinica, 2015, 2(1):56-64 |
| [5] | Zhou Y L, Chen M, Jiang C S. Robust tracking control of uncertain MIMO nonlinear systems with application to UAVs. IEEE/CAA Journal of Automatica Sinica, 2015, 2(1):25-32 |
| [6] | Yang Y, Du J L, Liu H B, Guo C, Abraham A. A trajectory tracking robust controller of surface vessels with disturbance uncertainties. IEEE Transactions on Control Systems Technology, 2014, 22(4):1511-1518 |
| [7] | Wang L, Su J B. Trajectory tracking of vertical take-off and landing unmanned aerial vehicles based on disturbance rejection control. IEEE/-CAA Journal of Automatica Sinica, 2015, 2(1):65-73 |
| [8] | Slotine J J, Li W P. Applied Nonlinear Control. Englewood Cliffs:Prentice-Hall, 1991. |
| [9] | Nussbaum R D. Some remarks on a conjecture in parameter adaptive control. Systems & Control Letters, 1983, 3(5):243-246 |
| [10] | Mårtensson B. Remarks on adaptive stabilization of first order non-linear systems. Systems & Control Letters, 1990, 14(1):1-7 |
| [11] | Ding Z T. Adaptive control of non-linear systems with unknown virtual control coefficients. International Journal of Adaptive Control and Signal Processing, 2000, 14(5):505-517 |
| [12] | Ye X D, Jiang J P. Adaptive nonlinear design without a priori knowledge of control directions. IEEE Transactions on Automatic Control, 1998, 43(10):1617-1621 |
| [13] | Zhang Y, Wen C Y, Soh Y C. Adaptive backstepping control design for systems with unknown high-frequency gain. IEEE Transactions on Automatic Control, 2000, 45(12):2350-2354 |
| [14] | Yang C G, Ge S S, Lee T H. Output feedback adaptive control of a class of nonlinear discrete-time systems with unknown control directions. Automatica, 2009, 45(1):270-276 |
| [15] | Yang C G, Ge S S, Xiang C, Chai T Y, Lee T H. Output feedback NN control for two classes of discrete-time systems with unknown control directions in a unified approach. IEEE Transactions on Neural Networks, 2008, 19(11):1873-1886 |
| [16] | Liu T G. Output-feedback adaptive control for a class of nonlinear systems with unknown control directions. Acta Automatica Sinica, 2007, 33(12):1306-1312 |
| [17] | Du J L, Guo C, Yu S H. Adaptive robust nonlinear ship course control based on backstepping and nussbaum gain. Intelligent Automation & Soft Computing, 2007, 13(3):263-272 |
| [18] | Du J L, Guo C, Yu S H, Zhao Y S. Adaptive autopilot design of timevarying uncertain ships with completely unknown control coefficient. IEEE Journal of Oceanic Engineering, 2007, 32(2):346-352 |
| [19] | Du J L, Abraham A, Yu S H, Zhao J. Adaptive dynamic surface control with Nussbaum gain for course-keeping of ships. Engineering Applications of Artificial Intelligence, 2014, 27:236-240 |
| [20] | Hu Q L. Neural network-based adaptive attitude tracking control for flexible spacecraft with unknown high-frequency gain. International Journal of Adaptive Control and Signal Processing, 2010, 24(6):477-489 |
| [21] | Dai S L, Yang C G, Ge S S, Lee T H. Robust adaptive output feedback control of a class of discrete-time nonlinear systems with nonlinear uncertainties and unknown control directions. International Journal of Robust and Nonlinear Control, 2013, 23(13):1472-1495 |
| [22] | Ye X D. Decentralized adaptive regulation with unknown highfrequency-gain signs. IEEE Transactions on Automatic Control, 1999, 44(11):2072-2076 |
| [23] | Ge S S, Hong F, Lee T H. Adaptive neural control of nonlinear time-delay systems with unknown virtual control coefficients. IEEE Transactions on Systems, Man, and Cybernetics, Part B:Cybernetics, 2004, 34(1):499-516 |
| [24] | Yang C G, Zhai L F, Ge S S, Chai T Y, Lee T H. Adaptive model reference control of a class of MIMO discrete-time systems with compensation of nonparametric uncertainty. In:Proceedings of the 2008 American Control Conference. Seattle, WA:IEEE, 2008. 4111-4116 |
| [25] | Li Y N, Yang C G, Ge S S, Lee T H. Adaptive output feedback NN control of a class of discrete-time MIMO nonlinear systems with unknown control directions. IEEE Transactions on Systems, Man, and Cybernetics, Part B:Cybernetics, 2011, 41(2):507-517 |
| [26] | Ye X D.Decentralized adaptive stabilization of large-scale nonlinear time-delay systems with unknown high-frequency-gain signs IEEE Transactions on Automatic Control, 2011, 56(6):1473-1478 |
| [27] | Yang C G, Li Y N, Ge S S, Lee T H. Adaptive control of a class of discrete-time MIMO nonlinear systems with uncertain couplings. International Journal of Control, 2010, 83(10):2120-2133 |
| [28] | Boulkroune A, Tadjine M, MSaad M, Farza M. Fuzzy adaptive controller for MIMO nonlinear systems with known and unknown control direction. Fuzzy Sets and Systems, 2010, 161(6):797-820 |
| [29] | Arefi M M, Jahed-Motlagh M R. Observer-based adaptive neural control of uncertain MIMO nonlinear systems with unknown control direction. International Journal of Adaptive Control and Signal Processing, 2013, 27(9):741-754 |
| [30] | Chen W S, Li X B, Ren W, Wen C Y. Adaptive consensus of multiagent systems with unknown identical control directions based on a novel nussbaum-type function. IEEE Transactions on Automatic Control, 2014, 59(7):1887-1892 |
| [31] | Chen C, Liu Z, Zhang Y, Chen C L P. Adaptive control of robotic systems with unknown actuator nonlinearities and control directions. Nonlinear Dynamics, 2015, 81(3):1289-1300 |
| [32] | Ding Z T. Adaptive consensus output regulation of a class of nonlinear systems with unknown high-frequency gain. Automatica, 2015, 51:348-355 |
| [33] | Zhou J, Wen C Y. Adaptive backstepping control of uncertain systems. Nonsmooth Nonlinearities, Interactions or Time-variations. Berlin Heidelberg:Springer, 2008. |
| [34] | Tao G, Kokotovic P V. Adaptive Control of Systems with Actuator and Sensor Nonlinearities. New York:John Wiley & Sons, 1996. |
| [35] | Liu Y J, Liu L, Tong S C. Adaptive neural network tracking design for a class of uncertain nonlinear discrete-time systems with dead-zone. Science China Information Sciences, 2014, 57(3):1-12 |
| [36] | Zhang X Y, Lin Y. A robust adaptive dynamic surface control for nonlinear systems with hysteresis input. Acta Automatica Sinica, 2010, 36(9):1264-1271 |
| [37] | Nguyen N T, Balakrishnan S N. Bi-objective optimal control modification adaptive control for systems with input uncertainty. IEEE/CAA Journal of Automatica Sinica, 2014, 1(4):423-434 |
| [38] | Su C Y, Wang Q Q, Chen X K, Rakheja S. Adaptive variable structure control of a class of nonlinear systems with unknown Prandtl-Ishlinskii hysteresis. IEEE Transactions on Automatic Control, 2005, 50(12):2069-2074 |
| [39] | Chen M, Ge S S, Ren B B. Adaptive tracking control of uncertain MIMO nonlinear systems with input constraints. Automatica, 2011, 47(3):452-465 |
| [40] | Zhou J, Wen C Y, Li T S. Adaptive output feedback control of uncertain nonlinear systems with hysteresis nonlinearity. IEEE Transactions on Automatic Control, 2012, 57(10):2627-2633 |
| [41] | Chen M, Wu Q X, Jiang C S, Jiang B. Guaranteed transient performance based control with input saturation for near space vehicles. Science China Information Sciences, 2014, 57(5):1-12 |
| [42] | Xu B. Robust adaptive neural control of flexible hypersonic flight vehicle with dead-zone input nonlinearity. Nonlinear Dynamics, 2015, 80(3):1509-1520 |
| [43] | Wei J M, Hu Y A, Sun M M. Adaptive iterative learning control for a class of nonlinear time-varying systems with unknown delays and input dead-zone. IEEE/CAA Journal of Automatica Sinica, 2014, 1(3):302-314 |
| [44] | Lewis F L, Dawson D M, Abdallah C T. Robot Manipulator Control:Theory and Practice (Second edition). New York:CRC Press, 2003. |
| [45] | Spong M W, Vidyasagar M. Robot Dynamics and Control. New York:John Wiley & Sons, 1989. |
| [46] | Zhang T P, Yang Y. Adaptive fuzzy control for a class of MIMO nonlinear systems with unknown dead-zones. Acta Automatica Sinica, 2007, 33(1):96-99 |
| [47] | Wen C Y, Zhou J, Liu Z T, Su H Y. Robust adaptive control of uncertain nonlinear systems in the presence of input saturation and external disturbance. IEEE Transactions on Automatic Control, 2011, 56(7):1672-1678 |
| [48] | Ryan E P. A nonlinear universal servomechanism. IEEE Transactions on Automatic Control, 1994, 39(4):753-761 |