A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 9
Issue 7
Volume 9
Issue 7
IEEE/CAA Journal of Automatica Sinica
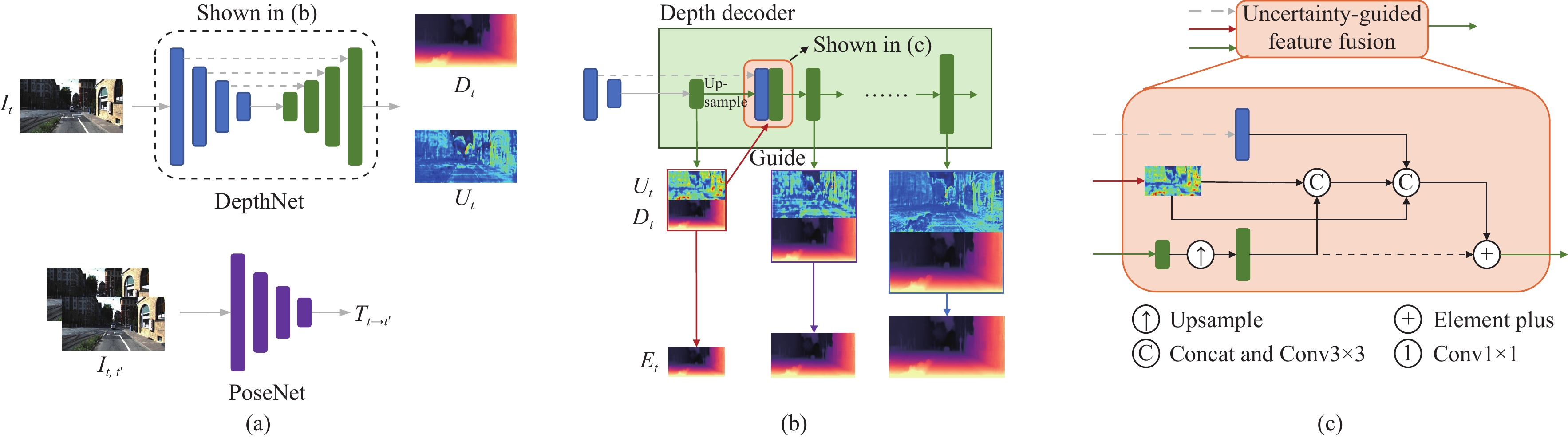
| Citation: | Z. Y. Li, J. J. Jiang, and X. M. Liu, “Self-supervised monocular depth estimation via discrete strategy and uncertainty,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 7, pp. 1307–1310, Jul. 2022. doi: 10.1109/JAS.2022.105698

|

| [1] |
A. Bhoi. “Monocular depth estimation: A survey.” arXiv preprint arXiv: 1901.09402, 2019.
|
| [2] |
Z. He, L. Q Jin, and C. Ye, “An RGB-D camera based visual positioning system for assistive navigation by a robotic navigation aid,” IEEE/CAA J. Autom. Sin., vol. 8, no. 8, pp. 1389–1400, 2021. doi: 10.1109/JAS.2021.1004084
|
| [3] |
X. P. Wang, M. Liu, D. S. Raychaudhuri, S. Paul, Y. N. Wang, and A. K. Roy-Chowdhury, “Learning person re-identification models from videos with weak supervision,” IEEE Trans. Imag. Process., vol. 30, pp. 3017–3028, 2021. doi: 10.1109/TIP.2021.3056223
|
| [4] |
T. H. Zhou, M. Brown, N. Snavely, and D. G. Lowe, “Unsupervised learning of depth and ego-motion from video,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit., Honolulu, USA, 2017, pp. 1851–1858.
|
| [5] |
C. Godard, O. Mac Aodha, M. Firman, and G. J. Brostow, “Digging into self-supervised monocular depth estimation,” in Proc. Int. Conf. Comput. Vis., Seoul, Korea, 2019, pp. 3828–3838.
|
| [6] |
A. Johnston and G. Carneiro, “Self-supervised monocular trained depth estimation using self-attention and discrete disparity volume,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit., Virtual, 2020, pp. 4756–4765.
|
| [7] |
M. Klingner, J.-A. Termöhlen, J. Mikolajczyk, and T. Fingscheidt, “Self-supervised monocular depth estimation: Solving the dynamic object problem by semantic guidance,” in Proc. IEEE Conf. Eur. Conf. Comput. Vis., Munich, Germany, 2018, pp. 582–600.
|
| [8] |
M. Poggi, F. Aleotti, F. Tosi, and S. Mattoccia, “On the uncertainty of self-supervised monocular depth estimation,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit., 2020, pp. 3227–3237.
|
| [9] |
A. Kendall and Y. Gal, “What uncertainties do we need in bayesian deep learning for computer vision?” in Proc. Adv. Neural Inf. Process. Syst., Long Beach, USA, 2017, pp. 5574–5584.
|
| [10] |
H. Fu, M. M. Gong, C. H. Wang, K. Batmanghelich, and D. C. Tao, “Deep ordinal regression network for monocular depth estimation,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit., Salt Lake City, USA, 2018, pp. 2002–2011.
|
| [11] |
A. Geiger, P. Lenz, and R. Urtasun, “Are we ready for autonomous driving? The KITTI vision benchmark suite,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit., Providence, USA, 2012, pp. 3354–3361.
|
| [12] |
A. Saxena, M. Sun, and R. A. Ng, “Make3D: Learning 3D scene structure from a single still image,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 31, no. 5, pp. 824–840, 2009. doi: 10.1109/TPAMI.2008.132
|
| [13] |
C. Liu, J. W. Gu, K. Kim, S. G. Narasimhan, and J. Kautz, “Neural RGB(r)D sensing: Depth and uncertainty from a video camera,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit., Long Beach, USA, 2019, pp. 10986–10995.
|
| [14] |
L. J. Wang, J. M. Zhang, Y.F. Wang, H. C. Lu, and X. Ruan, “Cliffnet for monocular depth estimation with hierarchical embedding loss,” in Proc. IEEE Conf. Eur. Conf. Comput. Vis., Glasgow, UK, 2020, pp. 316–331.
|
| [15] |
D. Eigen, C. Puhrsch, and R. Fergus, “Depth map prediction from a single image using a multi-scale deep network,” in Proc. IEEE Conf. Adv. Neural Inf. Process. Syst., Montreal, Quebec, 2014, pp. 2366–2374.
|
| [16] |
R. Mahjourian, M. Wicke, and A. Angelova, “Unsupervised learning of depth and ego-motion from monocular video using 3D geometric constraints,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit., Salt Lake City, USA, 2018, pp. 5667–5675.
|
| [17] |
Z. C. Yin and J. P. Shi, “Geonet: Unsupervised learning of dense depth, optical flow and camera pose,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit., Salt Lake City, USA, 2018, pp. 1983–1992.
|
| [18] |
C. Y. Wang, J. M. Buenaposada, R. Zhu, and S. Lucey, “Learning depth from monocular videos using direct methods,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit., Salt Lake City, USA, 2018, pp. 2022–2030.
|
| [19] |
A. Ranjan, V. Jampani, L. Balles, K. Kim, D. Sun, J. Wulff, and M. J. Black, “Competitive collaboration: Joint unsupervised learning of depth, camera motion, optical flow and motion segmentation,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit., Long Beach, USA, 2019, pp. 225–234.
|
| [20] |
C. X. Luo, Z. H. Yang, P. Wang, Y. Wang, W. Xu, R. Nevatia, and A. Yuille, “Every pixel counts++: Joint learning of geometry and motion with 3D holistic understanding,” Trans. Pattern Anal. Mach. Intell., vol. 42, no. 10, pp. 2624–2641, 2019.
|
Figures(5) / Tables(2)






 DownLoad:
DownLoad: