A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 9
Issue 7
Volume 9
Issue 7
IEEE/CAA Journal of Automatica Sinica
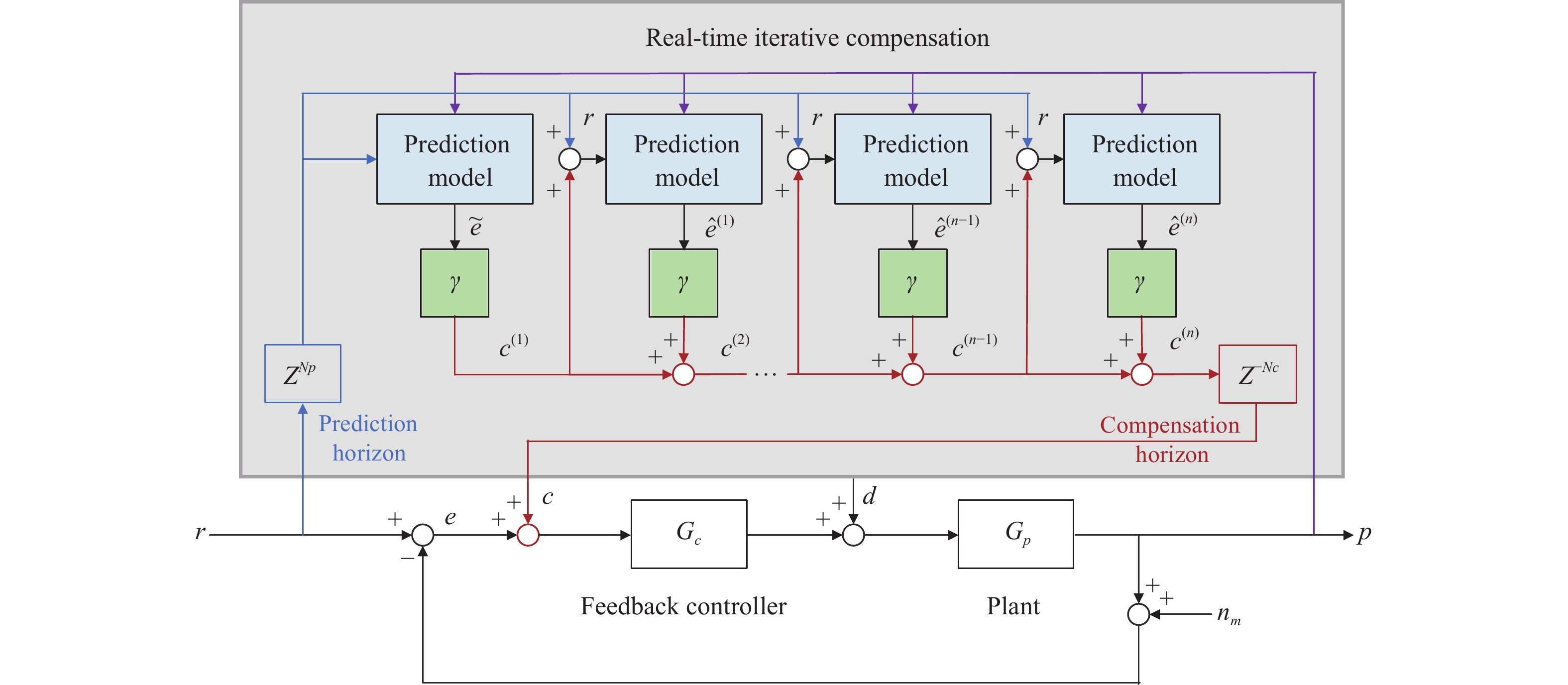
| Citation: | C. X. Hu, R. Zhou, Z. Wang, Y. Zhu, and M. Tomizuka, “Real-time iterative compensation framework for precision mechatronic motion control systems,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 7, pp. 1218–1232, Jul. 2022. doi: 10.1109/JAS.2022.105689

|

| [1] |
Q. Wu, L. Yu, Y.-W. Wang, and W.-A. Zhang, “LESO-based position synchronization control for networked multi-axis servo systems with time-varying delay,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 4, pp. 1116–1123, Jul. 2020. doi: 10.1109/JAS.2020.1003264
|
| [2] |
L. Dai, X. Li, Y. Zhu, M. Zhang, and C. Hu, “The generation mechanism of tracking error during acceleration or deceleration phase in ultraprecision motion systems,” IEEE Trans. Ind. Electron., vol. 66, no. 9, pp. 7109–7119, Sep. 2019. doi: 10.1109/TIE.2018.2878114
|
| [3] |
Z. Wang, R. Zhou, C. Hu, and Y. Zhu, “Online iterative learning compensation method based on model prediction for trajectory tracking control systems,” IEEE Trans. Ind. Inform., vol. 18, no. 1, pp. 415–425, Jan. 2022. doi: 10.1109/TII.2021.3085845
|
| [4] |
W. He, X. Mu, L. Zhang, and Y. Zou, “Modeling and trajectory tracking control for flapping-wing micro aerial vehicles,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 1, pp. 148–156, Jan. 2021. doi: 10.1109/JAS.2020.1003417
|
| [5] |
Z. Wang, C. Hu, and Y. Zhu, “Accelerated iteration algorithm based contouring error estimation for multiaxis motion control,” IEEE/ASME Trans. Mechatron., vol. 27, no. 1, pp. 452–462, Feb. 2022. doi: 10.1109/TMECH.2021.3066188
|
| [6] |
Y. Yuan, Z. Wang, Y. Yu, L. Guo, and H. Yang, “Active disturbance rejection control for a pneumatic motion platform subject to actuator saturation: An extended state observer approach,” Automatica, vol. 107, pp. 353–361, Sep. 2019. doi: 10.1016/j.automatica.2019.05.056
|
| [7] |
R. Zhou, C. Hu, Z. Wang, S. He, and Y. Zhu, “Nonlinearity compensation and high-frequency flexibility suppression based RIC method for precision motion control systems,” IEEE Trans. Ind. Inform., 2022. DOI: 10.1109/TII.2022.3158944
|
| [8] |
Z. Chen, B. Yao, and Q. Wang, “μ-synthesis-based adaptive robust control of linear motor driven stages with high-frequency dynamics: A case study,” IEEE/ASME Trans. Mechatronics, vol. 20, no. 3, pp. 1482–1490, Jun. 2015. doi: 10.1109/TMECH.2014.2369454
|
| [9] |
M. Li, S. Tan, J. Xiong, J. Gan, and X. Zhang, “Model-free output feedback discrete sliding mode control with disturbance compensation for precision motion systems,” IET Contr. Theory Appl., vol. 14, no. 14, pp. 1867–1876, Sep. 2020. doi: 10.1049/iet-cta.2019.1184
|
| [10] |
W. Li, Z. Xie, Y. Cao, P. K. Wong, and J. Zhao, “Sampled-data asynchronous fuzzy output feedback control for active suspension systems in restricted frequency domain,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 5, pp. 1052–1066, May 2021. doi: 10.1109/JAS.2020.1003306
|
| [11] |
X. Zhang, Q. Zhu, Y. Sun, Z. Yang, and X. Sun, “Three-degree-of-freedom positioning control of magnetically levitated permanent magnet planar motor using active disturbance rejection control scheme,” Adv. Mech. Eng., vol. 9, no. 7, pp. 1–13, Jul. 2017.
|
| [12] |
W. Wang, C. Hu, K. Zhou, and Z. Wang, “Time parameter mapping and contour error precompensation for multi-axis input shaping,” IEEE Trans. Ind. Inform., 2022. DOI: 10.1109/TII.2022.3158960
|
| [13] |
M. Tomizuka and L. Sun, “Simplified realization of zero phase error tracking,” J. Dyn. Syst. Meas. Control, vol. 143, no. 3, Mar. 2021, Art. no. 031008.
|
| [14] |
M. Tomizuka, “Zero phase error tracking algorithm for digital control,” J. Dyn. Syst. Meas. Control, vol. 109, no. 1, pp. 65–68, Mar. 1987. doi: 10.1115/1.3143822
|
| [15] |
Y. Lee, L. Sun, J. Moon, C. C. Chung, and M. Tomizuka, “Reference modulation for performance enhancement of motion control systems with nonlinear parameter variations,” IEEE/ASME Trans. Mechatron., vol. 24, no. 5, pp. 2040–2051, Oct. 2019. doi: 10.1109/TMECH.2019.2930087
|
| [16] |
D. Bristow, M. Tharayil, and A. Alleyne, “A survey of iterative learning control,” IEEE Control Syst. Mag., vol. 26, no. 3, pp. 96–114, Jun. 2006. doi: 10.1109/MCS.2006.1636313
|
| [17] |
S. Mishra and M. Tomizuka, “Projection-based iterative learning control for wafer scanner systems,” IEEE/ASME Trans. Mechatron., vol. 14, no. 3, pp. 388–393, Jun. 2009. doi: 10.1109/TMECH.2008.2007302
|
| [18] |
L. Hazeleger, R. Beerens, and N. van de Wouw, “Proportional-integral-derivative-based learning control for high-accuracy repetitive positioning of frictional motion systems,” IEEE Trans. Control Syst. Technol., vol. 29, no. 4, pp. 1652–1663, Jul. 2021. doi: 10.1109/TCST.2020.3017803
|
| [19] |
R.-E. Precup, R.-C. Roman, E.-L. Hedrea, C.-A. Bojan-Dragos, M.-M. Damian, and M.-L. Nedelcea, “Performance improvement of low-cost iterative learning-based fuzzy control systems for tower crane systems,” Int. J. Comput. Commun. Control, vol. 17, no. 1, Feb. 2022.
|
| [20] |
Y. Jian, D. Huang, J. Liu, and D. Min, “High-precision tracking of piezoelectric actuator using iterative learning control and direct inverse compensation of hysteresis,” IEEE Trans. Ind. Electron., vol. 66, no. 1, pp. 368–377, Jan. 2019. doi: 10.1109/TIE.2018.2826450
|
| [21] |
C. Hu, Z. Wang, Y. Zhu, M. Zhang, and H. Liu, “Performance-oriented precision LARC tracking motion control of a magnetically levitated planar motor with comparative experiments,” IEEE Trans. Ind. Electron., vol. 63, no. 9, pp. 5763–5773, Sep. 2016. doi: 10.1109/TIE.2016.2538743
|
| [22] |
Z. Wang, C. Hu, Y. Zhu, S. He, K. Yang, and M. Zhang, “Neural network learning adaptive robust control of an industrial linear motor-driven stage with disturbance rejection ability,” IEEE Trans. Ind. Informat., vol. 13, no. 5, pp. 2172–2183, Oct. 2017. doi: 10.1109/TII.2017.2684820
|
| [23] |
D. Meng and J. Zhang, “Robust optimization-based iterative learning control for nonlinear systems with nonrepetitive uncertainties,” IEEE/CAA J. Autom. Sinica, vol. 8, no. 5, pp. 1001–1014, May 2021. doi: 10.1109/JAS.2021.1003973
|
| [24] |
Z. Wang, C. Hu, Z. Yu, and L. Zhu, “Prediction model based contouring error iterative pre-compensation scheme for precision multi-axis motion systems,” IEEE/ASME Trans. Mechatron., vol. 26, no. 5, pp. 2274–2284, Oct. 2021. doi: 10.1109/TMECH.2020.3034675
|
| [25] |
F. Boeren, A. Bareja, T. Kok, and T. Oomen, “Frequency-domain ILC approach for repeating and varying tasks: with application to semiconductor bonding equipment,” IEEE/ASME Trans. Mechatron., vol. 21, no. 6, pp. 2716–2727, Dec. 2016. doi: 10.1109/TMECH.2016.2577139
|
| [26] |
Z. Chen, F. Huang, W. Chen, J. Zhang, W. Sun, J. Chen, J. Gu, and S. Zhu, “RBFNN-based adaptive sliding mode control design for delayed nonlinear multilateral telerobotic system with cooperative manipulation,” IEEE Trans. Ind. Inform., vol. 16, no. 2, pp. 1236–1247, Feb. 2020. doi: 10.1109/TII.2019.2927806
|
| [27] |
I. A. Zamfirache, R.-E. Precup, R.-C. Roman, and E. M. Petriu, “Policy iteration reinforcement learning-based control using a grey wolf optimizer algorithm,” Inf. Sci., vol. 585, pp. 162–175, May 2022. doi: 10.1016/j.ins.2021.11.051
|
| [28] |
C. Hu, T. Ou, H. Chang, Y. Zhu, and L. Zhu, “Deep GRU neural network prediction and feedforward compensation for precision multiaxis motion control systems,” IEEE/ASME Trans. Mechatron., vol. 25, no. 3, pp. 1377–1388, Jun. 2020.
|
| [29] |
C. Hu, T. Ou, Y. Zhu, and L. Zhu, “GRU-type LARC strategy for precision motion control with accurate tracking error prediction,” IEEE Trans. Ind. Electron., vol. 68, no. 1, pp. 812–820, Jan. 2021. doi: 10.1109/TIE.2020.2991997
|
| [30] |
T. Ou, C. Hu, Y. Zhu, and L. Zhu, “Intelligent feedforward compensation motion control of maglev planar motor with precise reference modification prediction,” IEEE Trans. Ind. Electron., vol. 68, no. 9, pp. 7768–7777, Sep. 2021. doi: 10.1109/TIE.2020.3013795
|
| [31] |
K. Chew and M. Tomizuka, “Digital control of repetitive errors in disk drive systems,” IEEE Control Syst. Mag., vol. 10, no. 1, pp. 16–20, Jan. 1990. doi: 10.1109/37.50664
|
| [32] |
S. Zhu, X. Wang, and H. Liu, “Observer-based iterative and repetitive learning control for a class of nonlinear systems,” IEEE/CAA J. Autom. Sinica, vol. 5, no. 5, pp. 990–998, Sep. 2018. doi: 10.1109/JAS.2017.7510463
|
| [33] |
H. Fujimoto and T. Takemura, “High-precision control of ball-screw-driven stage based on repetitive control using n-times learning filter,” IEEE Trans. Ind. Electron., vol. 61, no. 7, pp. 3694–3703, Jul. 2014. doi: 10.1109/TIE.2013.2290286
|
| [34] |
G. Wang, Q.-S. Jia, J. Qiao, J. Bi, and M. Zhou, “Deep learning-based model predictive control for continuous stirred-tank reactor system,” IEEE Trans. Neural Netw. Learn. Syst., vol. 32, no. 8, pp. 3643–3652, Aug. 2021. doi: 10.1109/TNNLS.2020.3015869
|
| [35] |
R. Cao and K. Low, “A repetitive model predictive control approach for precision tracking of a linear motion system,” IEEE Trans. Ind. Electron., vol. 56, no. 6, pp. 1955–1962, Jun. 2009. doi: 10.1109/TIE.2008.2007034
|
| [36] |
S. Huang, G. Cao, J. Xu, Y. Cui, C. Wu, and J. He, “Predictive position control of long-stroke planar motors for high-precision positioning applications,” IEEE Trans. Ind. Electron., vol. 68, no. 1, pp. 796–811, Jan. 2021. doi: 10.1109/TIE.2020.2984408
|
| [37] |
H. Du, X. Yu, M. Z. Q. Chen, and S. Li, “Chattering-free discrete-time sliding mode control,” Automatica, vol. 68, pp. 87–91, Jun. 2016. doi: 10.1016/j.automatica.2016.01.047
|
| [38] |
J. B. Rawlings and D. Q. Mayne, Model Predictive Control: Theory and Design. Madison, WI, USA: Nob Hill Publishing, 2009.
|
| [39] |
Y. Hu, B. Liu, Q. Zhou, and C. Yang, “Recursive extended least squares parameter estimation for Wiener nonlinear systems with moving average noises,” Circuits Syst. Signal Process., vol. 33, no. 2, pp. 655–664, Feb. 2014. doi: 10.1007/s00034-013-9652-x
|
| [40] |
R. A. Horn and C. R. Johnson, Matrix Analysis. New York, NY, USA: Cambridge Univ. Press, 2013.
|
| [41] |
D. Wang, “Convergence and robustness of discrete time nonlinear systems with iterative learning control,” Automatica, vol. 34, no. 11, pp. 1445–1448, Nov. 1998. doi: 10.1016/S0005-1098(98)00098-3
|
Figures(10) / Tables(2)






 DownLoad:
DownLoad: