A journal of IEEE and CAA , publishes
high-quality papers in English on original
theoretical/experimental research
and development in all areas of automation
 Volume 9
Issue 3
Volume 9
Issue 3
IEEE/CAA Journal of Automatica Sinica
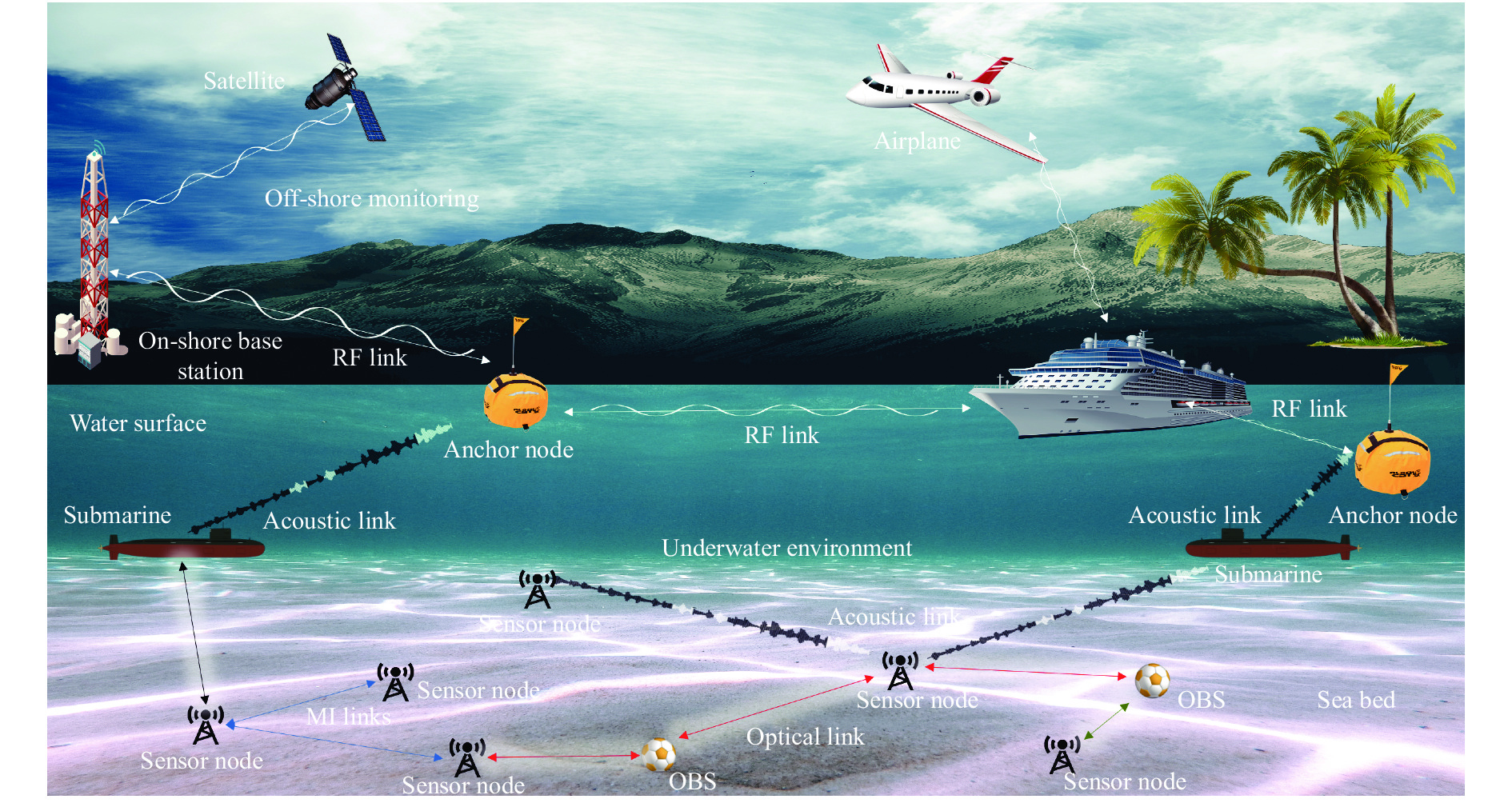
| Citation: | R. A. Khalil, N. Saeed, M. I. Babar, T. Jan, and S. Din, “Bayesian multidimensional scaling for location awareness in hybrid-internet of underwater things,” IEEE/CAA J. Autom. Sinica, vol. 9, no. 3, pp. 496–509, Mar. 2022. doi: 10.1109/JAS.2021.1004356

|

| [1] |
R. A. Khalil, N. Saeed, M. I. Babar, and T. Jan, “Toward the internet of underwater things: Recent developments and future challenges,” IEEE Consum. Electron. Mag., vol. 10, no. 6, pp. 32–37, Nov. 2021. doi: 10.1109/MCE.2020.2988441
|
| [2] |
M. F. Ali, D. N. K. Jayakody, Y. A. Chursin, S. Affes, and S. Dmitry, “Recent advances and future directions on underwater wireless communications,” Arch. Comput. Methods Eng., vol. 27, no. 5, pp. 1379–1412, Nov. 2020. doi: 10.1007/s11831-019-09354-8
|
| [3] |
C. C. Kao, Y. S. Lin, G. D. Wu, and C. J. Huang, “A comprehensive study on the internet of underwater things: Applications, challenges, and channel models,” Sensors, vol. 17, no. 7, p. 1477, Jul. 2017.
|
| [4] |
H. Y. Zhao, J. Yan, X. Y. Luo, and X. P. Gua, “Privacy preserving solution for the asynchronous localization of underwater sensor networks,” IEEE/CAA J. Autom. Sinica, vol. 7, no. 6, pp. 1511–1527, Nov. 2020. doi: 10.1109/JAS.2020.1003312
|
| [5] |
M. C. Domingo, “An overview of the internet of underwater things,” J. Netw. Comput. Appl., vol. 35, no. 6, pp. 1879–1890, Nov. 2012. doi: 10.1016/j.jnca.2012.07.012
|
| [6] |
C. M. G. Gussen, P. S. R. Diniz, M. L. R. Campos, W. A. Martins, F. M. Costa, and J. N. Gois, “A survey of underwater wireless communication technologies,” J. Commun. Inf. Syst., vol. 31, no. 1, pp. 242–255, Jan. 2016.
|
| [7] |
G. S. Spagnolo, L. Cozzella, and F. Leccese, “Underwater optical wireless communications: Overview,” Sensors, vol. 20, no. 8, p. 2261, Apr. 2020.
|
| [8] |
N. Saeed, A. Celik, T. Y. Al-Naffouri, and M. S. Alouini, “Underwater optical wireless communications, networking, and localization: A survey,” Ad Hoc Netw., vol. 94, p. 101935, Nov. 2019.
|
| [9] |
R. A. Khalil, M. I. Babar, N. Saeed, T. Jan, and H. S. Cho, “Effect of link misalignment in the optical-internet of underwater things,” Electronics, vol. 9, no. 4, p. 646, Apr. 2020.
|
| [10] |
A. Al-Kinani, C. X. Wang, L. Zhou, and W. S. Zhang, “Optical wireless communication channel measurements and models,” IEEE Commun. Surv. Tuts., vol. 20, no. 3, pp. 1939–1962, May 2018. doi: 10.1109/COMST.2018.2838096
|
| [11] |
R. A. Khalil and N. Saeed, “Optimal relay placement in magnetic induction-based internet of underwater things,” IEEE Sens. J., vol. 21, no. 1, pp. 821–828, Jan. 2021. doi: 10.1109/JSEN.2020.3012782
|
| [12] |
Y. Z. Li, S. N. Wang, C. Jin, Y. Zhang, and T. Jiang, “A survey of underwater magnetic induction communications: Fundamental issues, recent advances, and challenges,” IEEE Commun. Surv. Tuts., vol. 21, no. 3, pp. 2466–2487, Feb. 2019. doi: 10.1109/COMST.2019.2897610
|
| [13] |
D. B. Wei, L. Yan, C. P. Huang, J. Wang, J. F. Chen, M. Pan, and Y. G. Fang, “Dynamic magnetic induction wireless communications for autonomous-underwater-vehicle-assisted underwater IoT,” IEEE Internet Things J., vol. 7, no. 10, pp. 9834–9845, Oct. 2020. doi: 10.1109/JIOT.2020.2997709
|
| [14] |
A. Yassin, Y. Nasser, M. Awad, A. Al-Dubai, R. Liu, C. Yuen, R. Raulefs, and E. Aboutanios, “Recent advances in indoor localization: A survey on theoretical approaches and applications,” IEEE Commun. Surv. Tuts., vol. 19, no. 2, pp. 1327–1346, Nov. 2017. doi: 10.1109/COMST.2016.2632427
|
| [15] |
N. Saeed, H. Nam, T. Y. Al-Naffouri, and M. S. Alouini, “A State-of-the-art survey on multidimensional scaling-based localization techniques,” IEEE Commun. Surv. Tuts., vol. 21, no. 4, pp. 3565–3583, Dec. 2019. doi: 10.1109/COMST.2019.2921972
|
| [16] |
R. A. Khalil, N. Saeed, T. Jan, and M. Ashraf, “Multiple object localization in underwater wireless communication systems using the theory of gravitation,” in Proc. 25th Int. Conf. Mechatronics and Machine Vision in Practice, Stuttgart, Germany, 2018, pp. 1–6.
|
| [17] |
N. Saeed, A. Celik, T. Y. Al-Naffouri, and M. S. Alouini, “Energy harvesting hybrid acoustic-optical underwater wireless sensor networks localization,” Sensors, vol. 18, no. 1, p. 51, Jan. 2018.
|
| [18] |
N. Saeed, T. Y. Al-Naffouri, and M. S. Alouini, “Around the world of IoT/climate monitoring using internet of X-things,” IEEE Internet Things Mag., vol. 3, no. 2, pp. 82–83, Jun. 2020. doi: 10.1109/MIOT.2020.9125423
|
| [19] |
A. Y. Teymorian, W. Cheng, L. R. Ma, X. Z. Cheng, X. C. Lu, and Z. X. Lu, “3D underwater sensor network localization,” IEEE Trans. Mobile Comput., vol. 8, no. 12, pp. 1610–1621, Dec. 2009. doi: 10.1109/TMC.2009.80
|
| [20] |
B. Liu, H. Y. Chen, Z. G. Zhong, and H. V. Poor, “Asymmetrical round trip based synchronization-free localization in large-scale underwater sensor networks,” IEEE Trans. Wirel. Commun., vol. 9, no. 11, pp. 3532–3542, Nov. 2010. doi: 10.1109/TWC.2010.090210.100146
|
| [21] |
J. Heidemann, W. Ye, J. Wills, A. Syed, and Y. Li, “Research challenges and applications for underwater sensor networking,” in Proc. IEEE Wireless Communications and Networking Conf., Las Vegas, NV, USA, 2006, pp. 228–235.
|
| [22] |
M. Hosseini, H. Chizari, and A. S. Ismail, “New hybrid RSS-based localization mechanism for underwater wireless sensor networks,” Int. J. Comput. Commun. Netw., vol. 1, no. 1, Dec. 2011.
|
| [23] |
N. Saeed, A. Celik, T. Y. Al-Naffouri, and M. S. Alouini, “Underwater optical sensor networks localization with limited connectivity,” in Proc. IEEE Int. Conf. Acoustics, Speech and Signal Processing, Calgary, AB, Canada, 2018, pp. 3804–3808.
|
| [24] |
F. Akhoundi, A. Minoofar, and J. A. Salehi, “Underwater positioning system based on cellular underwater wireless optical CDMA networks,” in Proc. 26th Wireless and Optical Communication Conf., Newark, NJ, USA, 2017, pp. 1–3.
|
| [25] |
S. Arnon and D. Kedar, “Non-line-of-sight underwater optical wireless communication network,” J. Opt. Soc. Am. A, vol. 26, no. 3, pp. 530–539, Mar. 2009. doi: 10.1364/JOSAA.26.000530
|
| [26] |
S. C. Lin, A. A. Alshehri, P. Wang, and I. F. Akyildiz, “Magnetic induction-based localization in randomly deployed wireless underground sensor networks,” IEEE Internet Things J., vol. 4, no. 5, pp. 1454–1465, Oct. 2017. doi: 10.1109/JIOT.2017.2729887
|
| [27] |
I. Ullah, J. Y. Chen, X. Su, C. Esposito, and C. Choi, “Localization and detection of targets in underwater wireless sensor using distance and angle based algorithms,” IEEE Access, vol. 7, pp. 45693–45704, Apr. 2019. doi: 10.1109/ACCESS.2019.2909133
|
| [28] |
I. Borg, P. J. E. Groenen, and P. Mair, Applied Multidimensional Scaling and Unfolding. 2nd ed. New York, USA: Springer, 2018.
|
| [29] |
R. Bakker and K. T. Poole, “Bayesian metric multidimensional scaling,” Pol. Anal., vol. 21, no. 1, pp. 125–140, Jan. 2013. doi: 10.1093/pan/mps039
|
| [30] |
F. Wang, P. Ma, J. X. Guo, and R. Zhu, “Localization of IoT networks: An empirical Bayesian approach,” J. Phys. Conf. Ser., vol. 1629, p. 012003, Aug. 2020.
|
| [31] |
L. Lin and D. K. H. Fong, “Bayesian multidimensional scaling procedure with variable selection,” Comput. Stat. Data Anal., vol. 129, pp. 1–13, Jan. 2019. doi: 10.1016/j.csda.2018.07.007
|
| [32] |
N. Saeed and H. Nam, “Robust multidimensional scaling for cognitive radio network localization,” IEEE Trans. Veh. Technol., vol. 64, no. 9, pp. 4056–4062, Sept. 2015. doi: 10.1109/TVT.2014.2366515
|
| [33] |
S. C. Li and D. Y. Zhang, “A novel manifold learning algorithm for localization estimation in wireless sensor networks,” IEICE Trans. Commun., vol. E90-B, no. 12, pp. 3496–3500, Dec. 2007. doi: 10.1093/ietcom/e90-b.12.3496
|
| [34] |
S. Pandey and S. Varma, “A range based localization system in multihop wireless sensor networks: A distributed cooperative approach,” Wirel. Pers. Commun., vol. 86, no. 2, pp. 615–634, Jan. 2016. doi: 10.1007/s11277-015-2948-3
|
| [35] |
A. Singh and S. Verma, “Graph Laplacian regularization with procrustes analysis for sensor node localization,” IEEE Sens. J., vol. 17, no. 16, pp. 5367–5376, Aug. 2017. doi: 10.1109/JSEN.2017.2717919
|
| [36] |
Z. Y. Li, S. Desai, V. D. Sudev, P. Wang, J. S. Han, and Z. Sun, “Underwater cooperative MIMO communications using hybrid acoustic and magnetic induction technique,” Comput. Netw., vol. 173, p. 107191, May 2020.
|
| [37] |
M. Muzzammil, N. Ahmed, G. Qiao, I. Ullah, and L. Wan, “Fundamentals and advancements of magnetic-field communication for underwater wireless sensor networks,” IEEE Trans. Antennas Propag., vol. 68, no. 11, pp. 7555–7570, Nov. 2020. doi: 10.1109/TAP.2020.3001451
|
| [38] |
N. Saeed, M. S. Alouini, and T. Y. Al-Naffouri, “Toward the internet of underground things: A systematic survey,” IEEE Commun. Surv. Tutor., vol. 21, no. 4, pp. 3443–3466, Aug. 2019. doi: 10.1109/COMST.2019.2934365
|
| [39] |
H. Z. Guo, Z. Sun, and P. Wang, “Channel modeling of MI underwater communication using tri-directional coil antenna,” in Proc. IEEE Global Communications Conf., San Diego, CA, USA, 2015, pp. 1–6.
|
| [40] |
Z. Sun and I. F. Akyildiz, “Optimal deployment for magnetic induction-based wireless networks in challenged environments,” IEEE Trans. Wirel. Commun., vol. 12, no. 3, pp. 996–1005, Mar. 2013. doi: 10.1109/TWC.2013.011713.111896
|
| [41] |
A. Rushworth, “A review of underwater acoustic system analysis,” Int. J. of Rem. Sens., vol. 6, no. 2, pp. 365–366, 1985.
|
| [42] |
P. C. Etter, “Recent advances in underwater acoustic modelling and simulation,” J. Sound Vib., vol. 240, no. 2, pp. 351–383, Feb. 2001. doi: 10.1006/jsvi.2000.3212
|
| [43] |
W. H. Thorp, “Analytic description of the low-frequency attenuation coefficient,” J. Acous. Soc. Am., vol. 42, no. 1, Jul. 1967.
|
| [44] |
R. M. Corless, G. H. Gonnet, D. E. G. Hare, D. J. Jeffrey, and D. E. Knuth, “On the Lambert W function,” Adv. Comput. Math., vol. 5, no. 1, pp. 329–359, Dec. 1996. doi: 10.1007/BF02124750
|
| [45] |
K. S. Shifrin, Physical Optics of Ocean Water. New York, USA: American Institute of Physics, 1998.
|
| [46] |
A. Vavoulas, H. G. Sandalidis, and D. Varoutas, “Underwater optical wireless networks: A k-connectivity analysis,” IEEE J. Ocean. Eng., vol. 39, no. 4, pp. 801–809, Oct. 2014. doi: 10.1109/JOE.2013.2291135
|
| [47] |
J. B. Kruskal, “On the shortest spanning subtree of a graph and the traveling salesman problem,” Proc. Am. Math. Soc., vol. 7, no. 1, pp. 48–50, Feb. 1956. doi: 10.1090/S0002-9939-1956-0078686-7
|
| [48] |
E. L. Schwartz, A. Shaw, and E. Wolfson, “A numerical solution to the generalized mapmaker’s problem: Flattening nonconvex polyhedral surfaces,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 11, no. 9, pp. 1005–1008, Sept. 1989. doi: 10.1109/34.35506
|
| [49] |
J. B. Tenenbaum, V. De Silva, and J. C. Langford, “A global geometric framework for nonlinear dimensionality reduction,” Science, vol. 290, no. 5500, pp. 2319–2323, Dec. 2000. doi: 10.1126/science.290.5500.2319
|
| [50] |
D. Niculescu and B. Nath, “DV based positioning in Ad Hoc networks,” Telecommun. Syst., vol. 22, no. 1–4, pp. 267–280, Jan. 2003.
|
| [51] |
N. Patwari, A. O. Hero, M. Perkins, N. S. Correal, and R. J. O’dea, “Relative location estimation in wireless sensor networks,” IEEE Trans. Signal Process., vol. 51, no. 8, pp. 2137–2148, Aug. 2003. doi: 10.1109/TSP.2003.814469
|
| [52] |
Y. G. Chen, Y. Y. Tang, J. H. Liu, X. K. Zhang, and X. M. Xu, “Optimizing the number of relays for energy efficient multi-hop covert underwater acoustic cooperative networks,” Appl. Acoust., vol. 177, p. 107911, Jun. 2021.
|
| [53] |
W. W. Liu, J. P. Ding, J. Zheng, X. F. Chen, and H. Y. Mei, “Advances of wireless optical relay communication,” in Proc. SPIE 11604, Optics Frontiers Online 2020: Optical Communications and Networks.
|
| [54] |
F. Y. Xing, H. X. Yin, Z. W. Shen, and V. C. M. Leung, “Joint relay assignment and power allocation for multiuser multirelay networks over underwater wireless optical channels,” IEEE Internet Things J., vol. 7, no. 10, pp. 9688–9701, Oct. 2020. doi: 10.1109/JIOT.2020.2990925
|
| [55] |
A. Mariani, S. Kandeepan, A. Giorgetti, and M. Chiani, “Cooperative weighted centroid localization for cognitive radio networks,” in Proc. Int. Symp. Communications and Information Technologies, Gold Coast, QLD, Australia, 2012, pp. 459–464.
|
| [56] |
B. S. Srujana, Neha, P. Mathews, and V. P. Harigovindan, “Multi-source energy harvesting system for underwater wireless sensor networks,” Proc. Comput. Sci., vol. 46, pp. 1041–1048, Dec. 2015. doi: 10.1016/j.procs.2015.01.015
|
| [57] |
H. D. Li, C. Tian, J. Lu, M. J. Myjak, J. J. Martinez, R. S. Brown, and Z. D. Deng, “An energy harvesting underwater acoustic transmitter for aquatic animals,” Sci. Rep., vol. 6, no. 1, pp. 1–9, Sept. 2016. doi: 10.1038/srep33804
|
Figures(9) / Tables(1)






 DownLoad:
DownLoad: