2021, 8(11): 1774-1785.
doi: 10.1109/JAS.2020.1003399
Abstract:
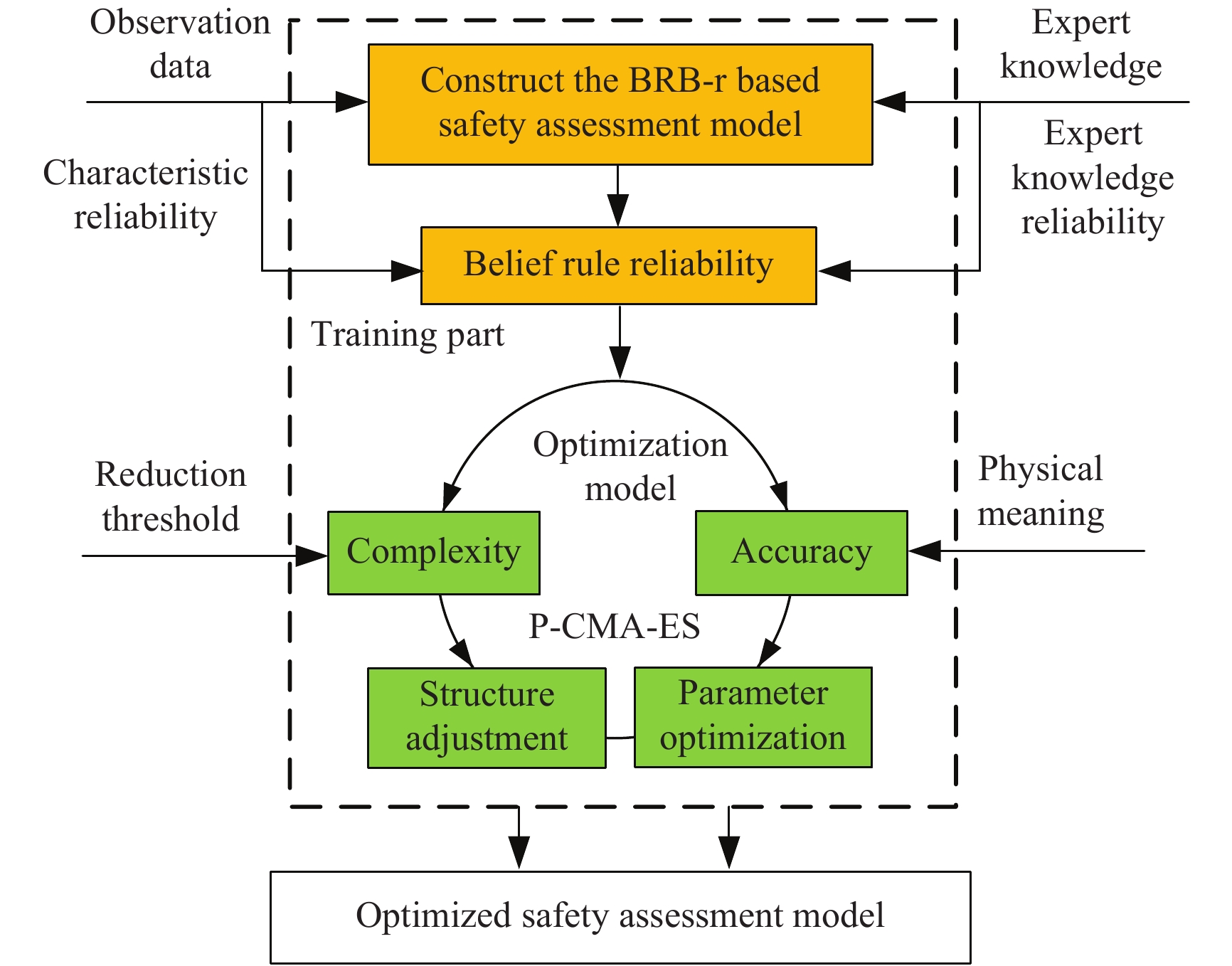
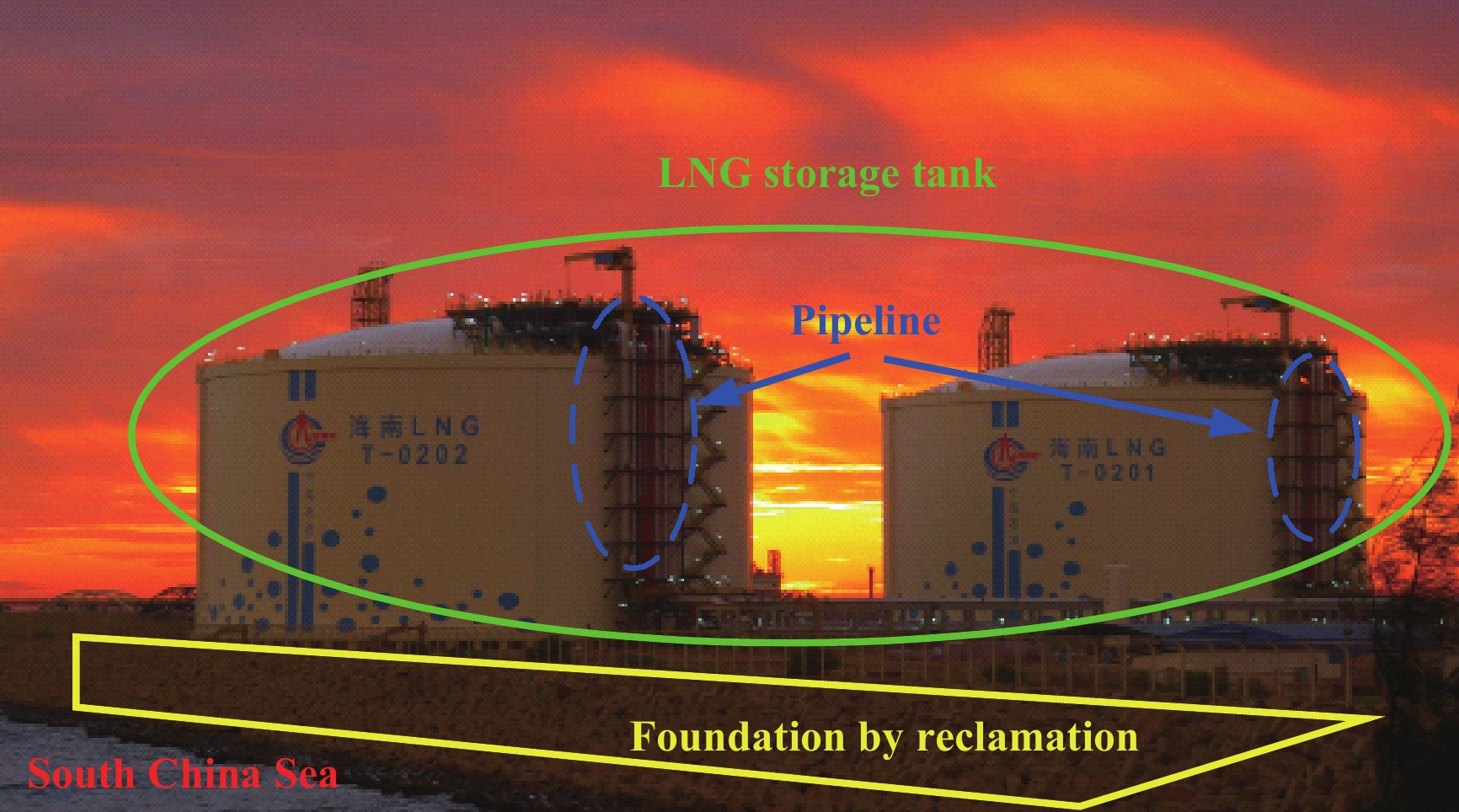
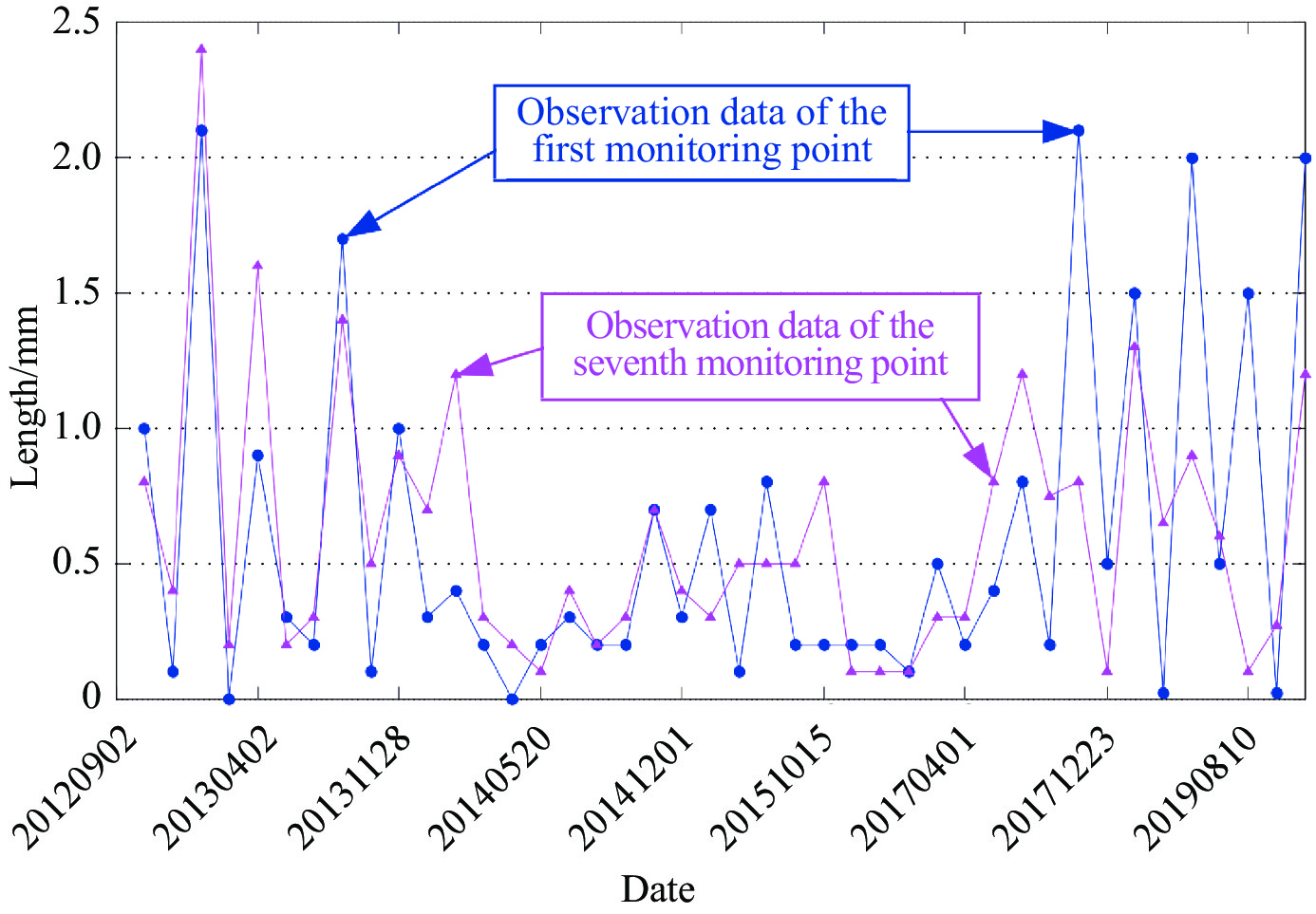
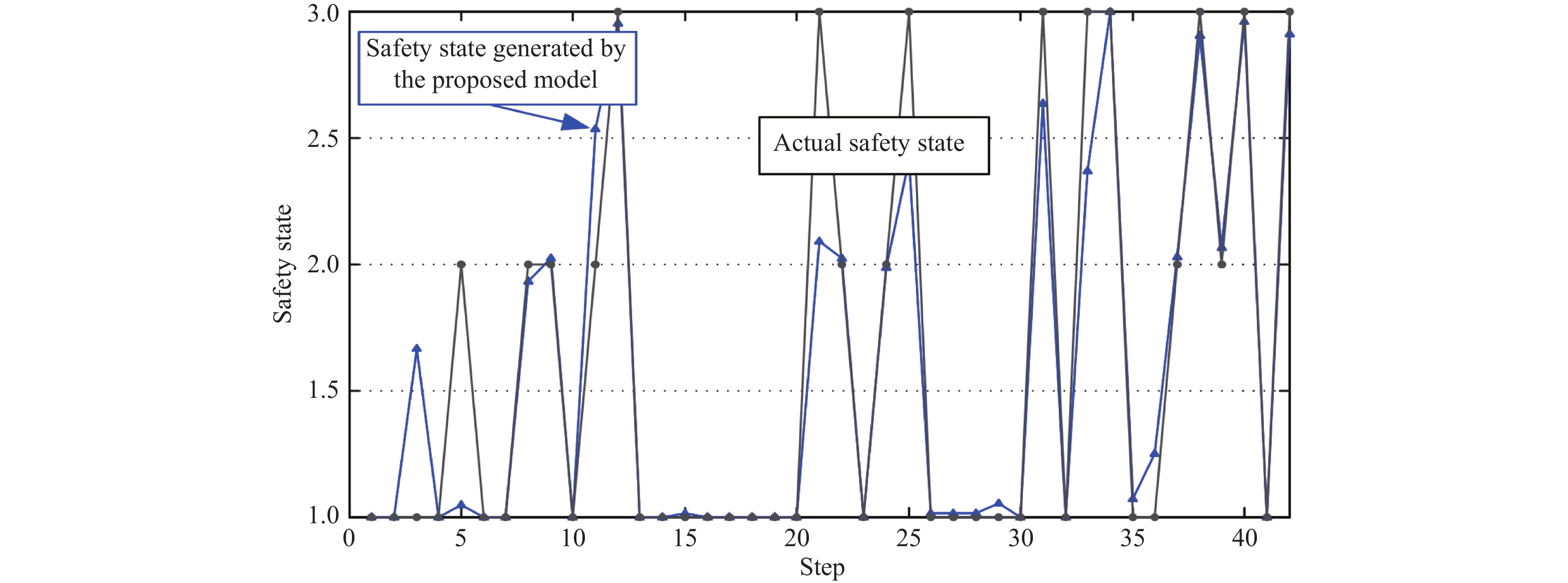
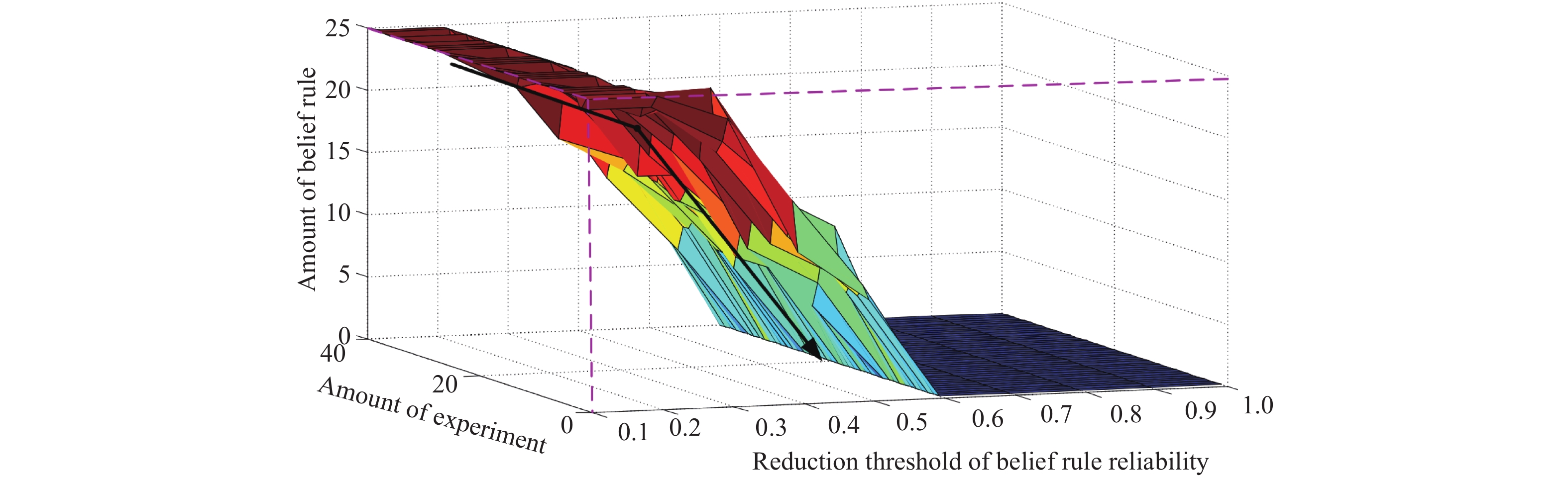
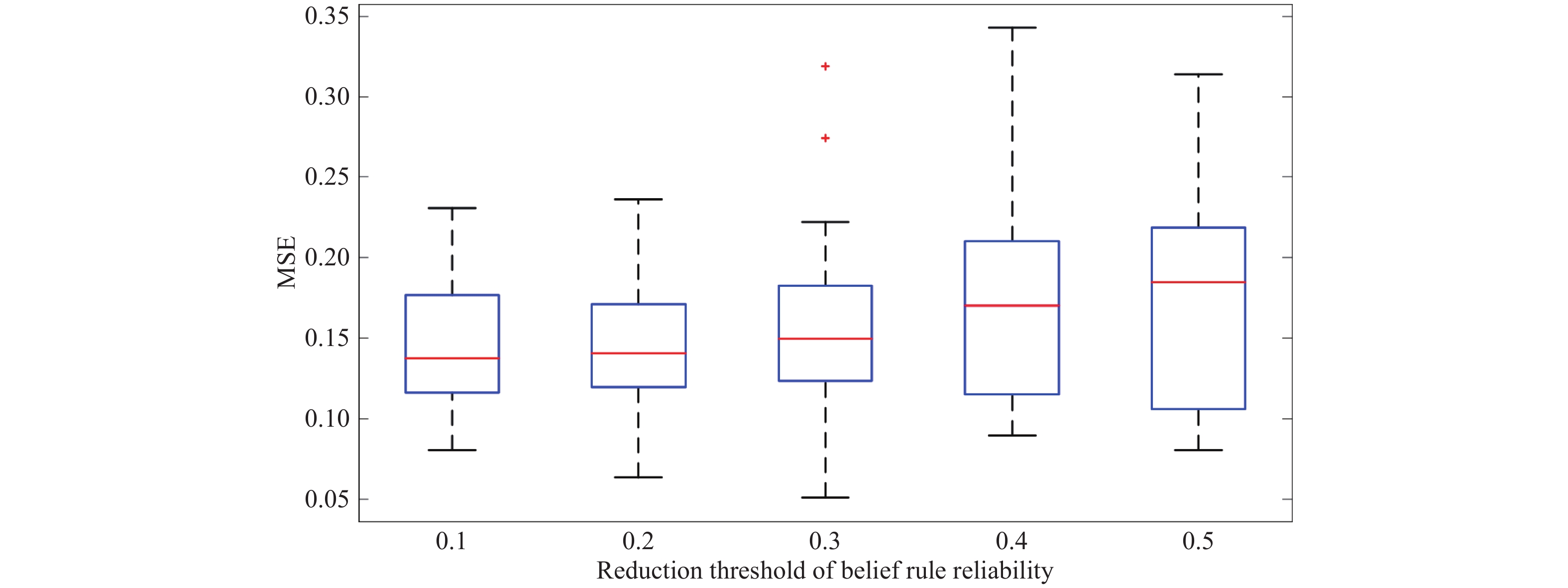
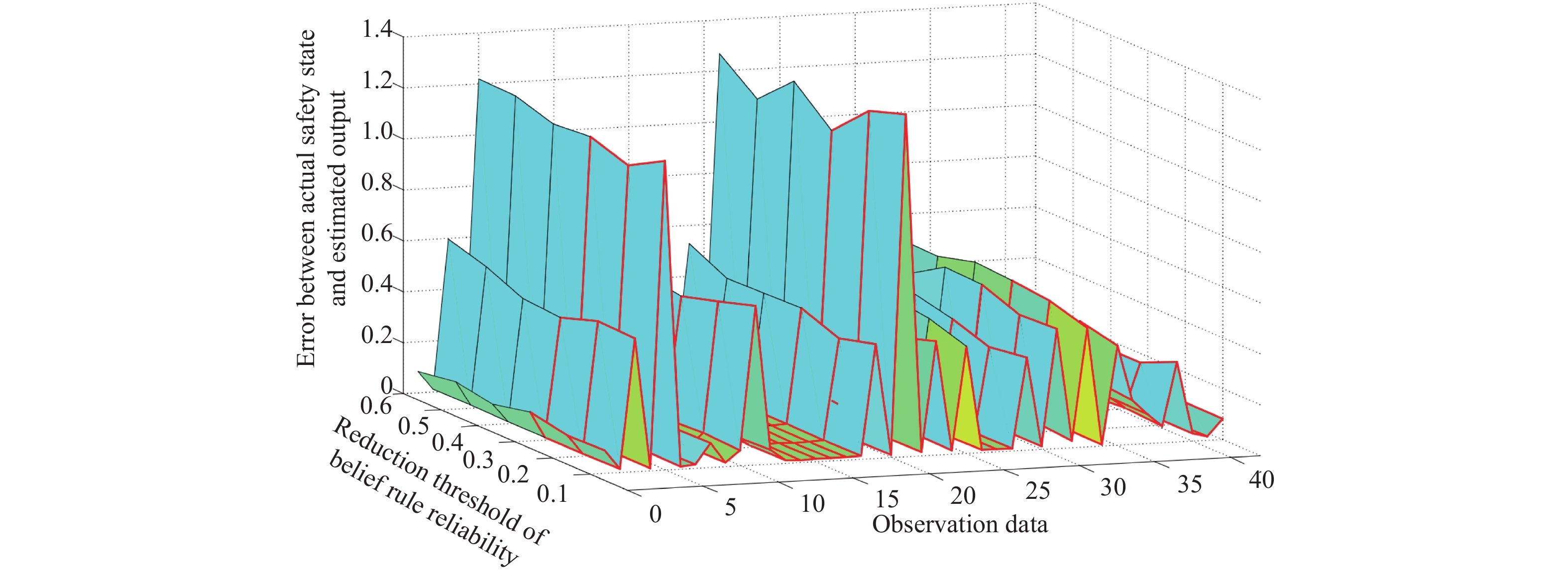
Safety assessment is one of important aspects in health management. In safety assessment for practical systems, three problems exist: lack of observation information, high system complexity and environment interference. Belief rule base with attribute reliability (BRB-r) is an expert system that provides a useful way for dealing with these three problems. In BRB-r, once the input information is unreliable, the reliability of belief rule is influenced, which further influences the accuracy of its output belief degree. On the other hand, when many system characteristics exist, the belief rule combination will explode in BRB-r, and the BRB-r based safety assessment model becomes too complicated to be applied. Thus, in this paper, to balance the complexity and accuracy of the safety assessment model, a new safety assessment model based on BRB-r with considering belief rule reliability is developed for the first time. In the developed model, a new calculation method of the belief rule reliability is proposed with considering both attribute reliability and global ignorance. Moreover, to reduce the influence of uncertainty of expert knowledge, an optimization model for the developed safety assessment model is constructed. A case study of safety assessment of liquefied natural gas (LNG) storage tank is conducted to illustrate the effectiveness of the new developed model.



















 E-mail Alert
E-mail Alert


