2020, 7(4): 991-1002.
doi: 10.1109/JAS.2020.1003234
Abstract:
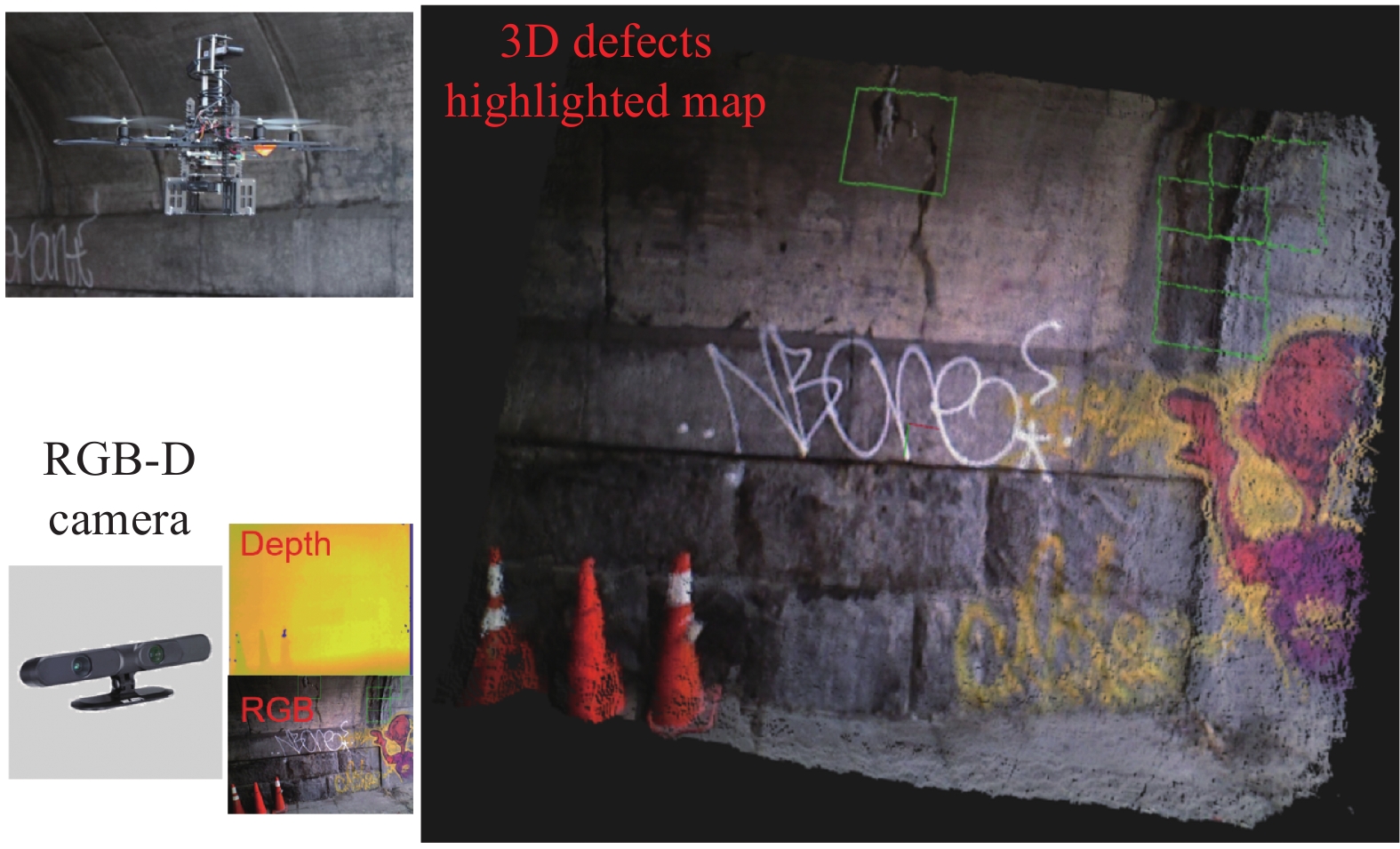
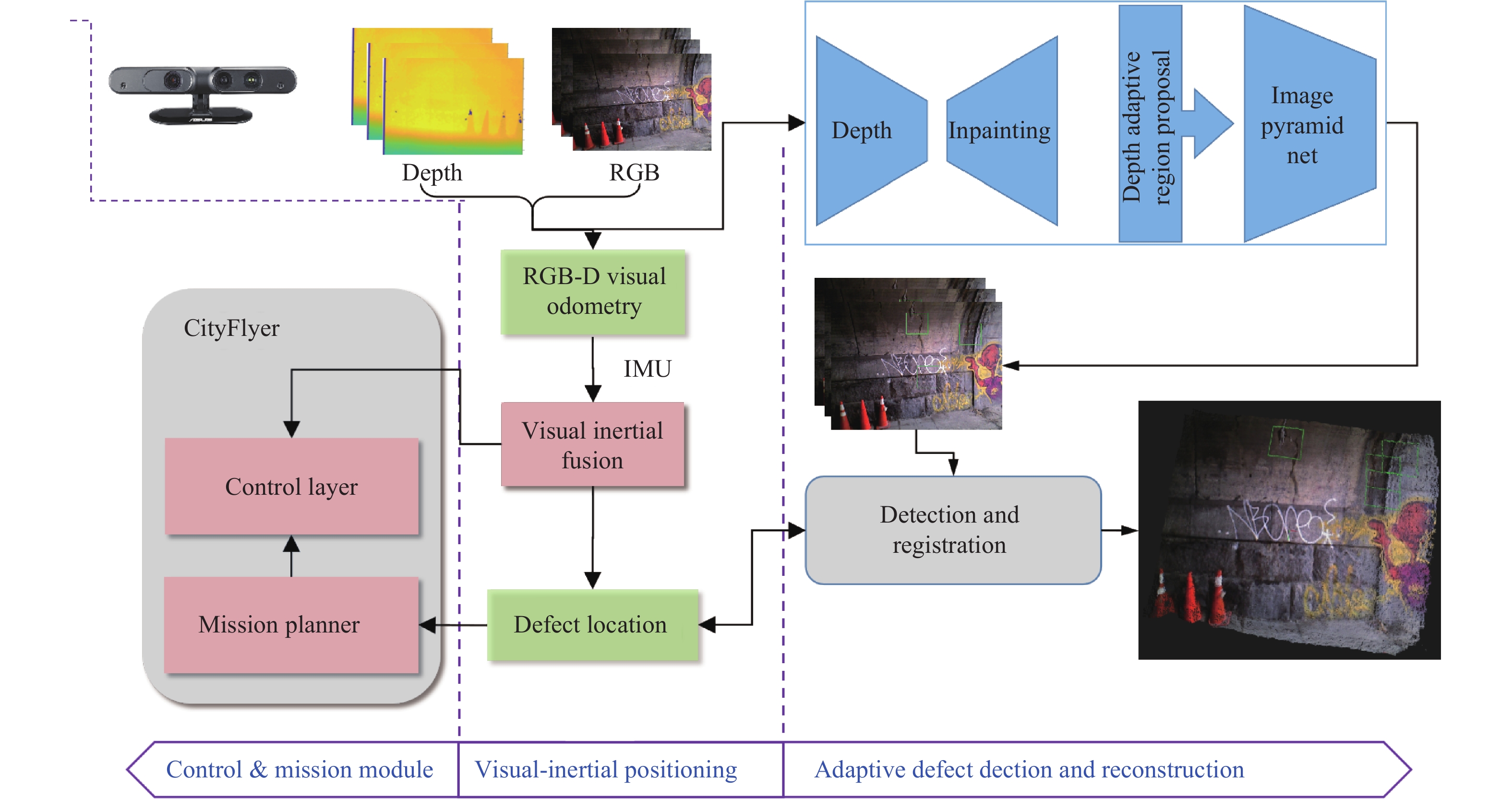
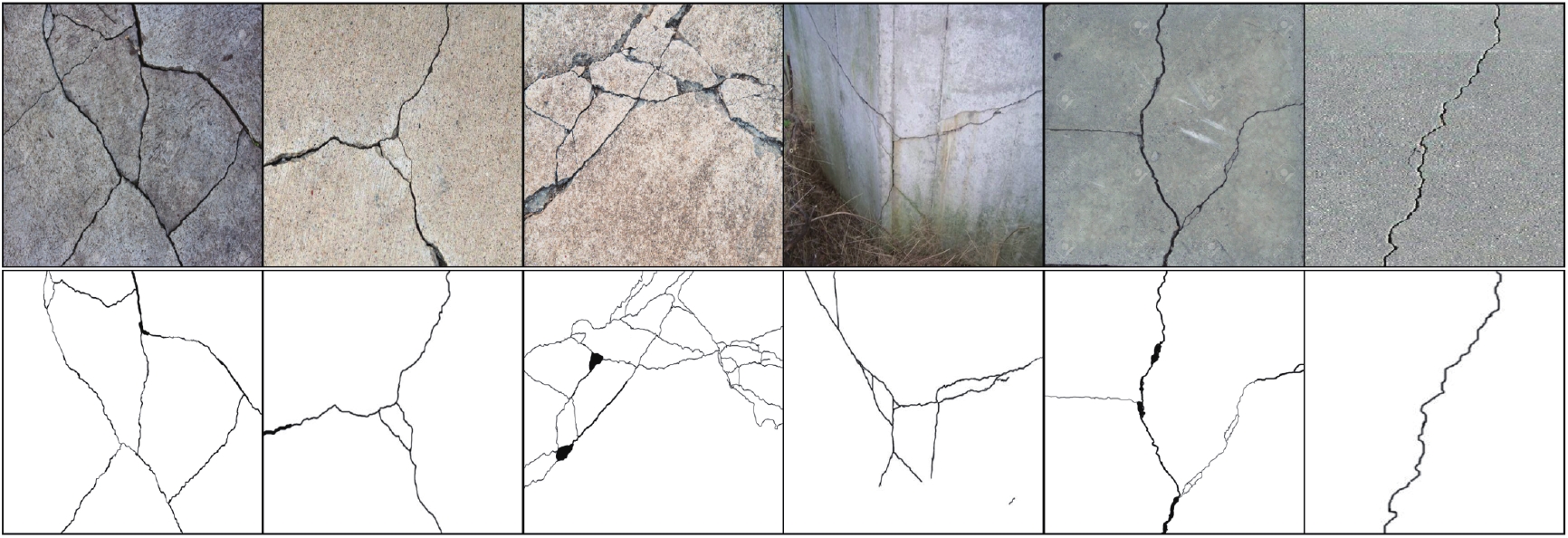
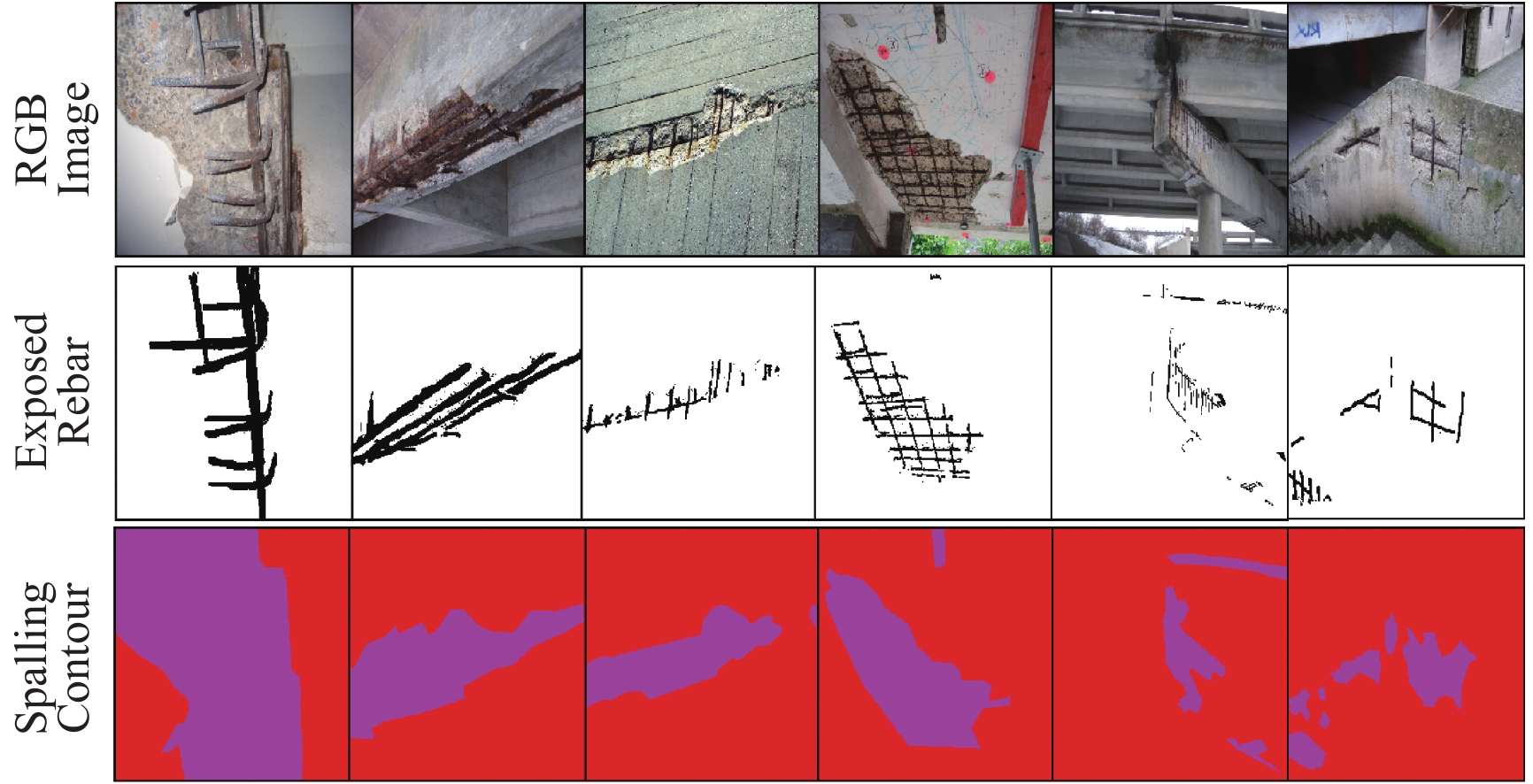
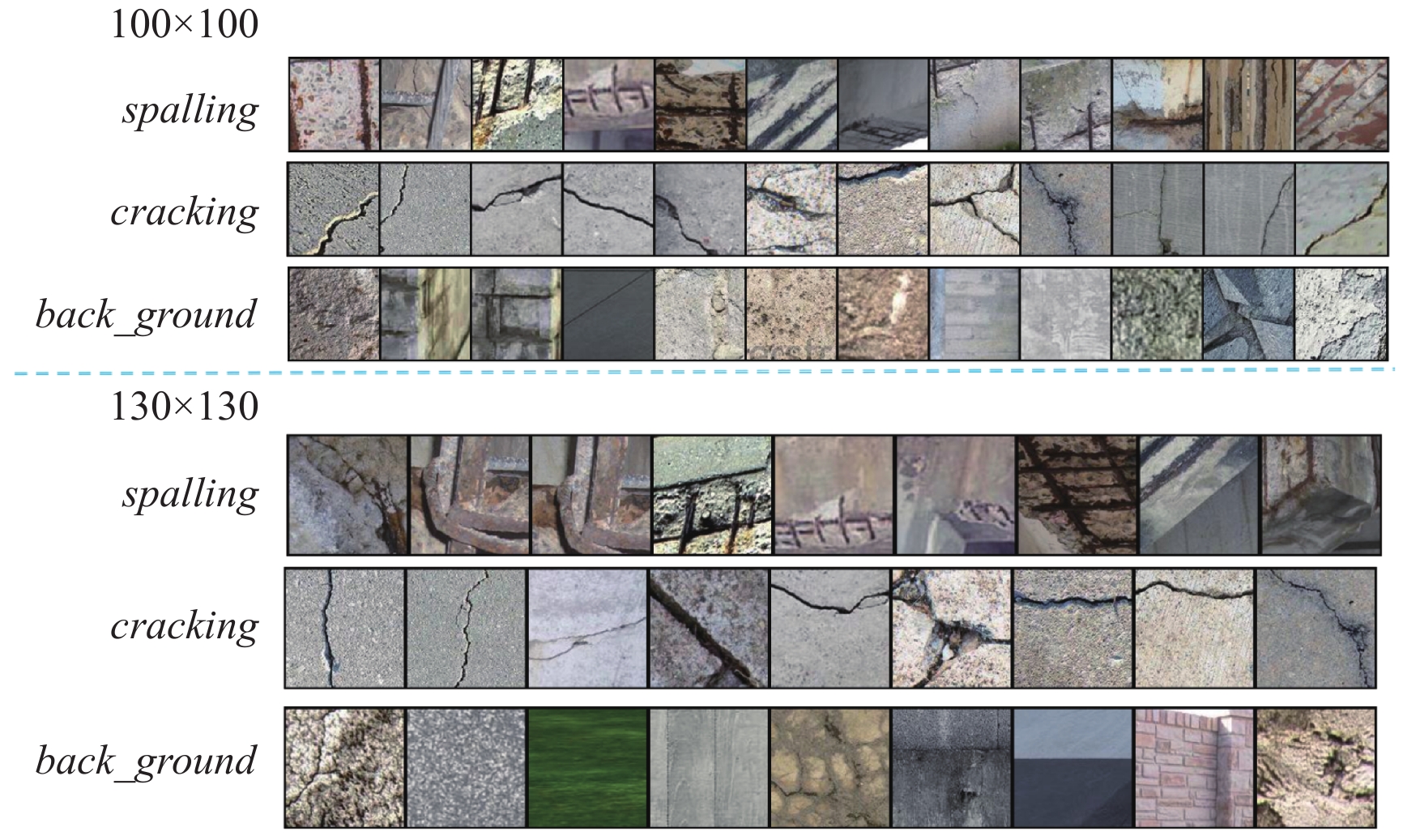
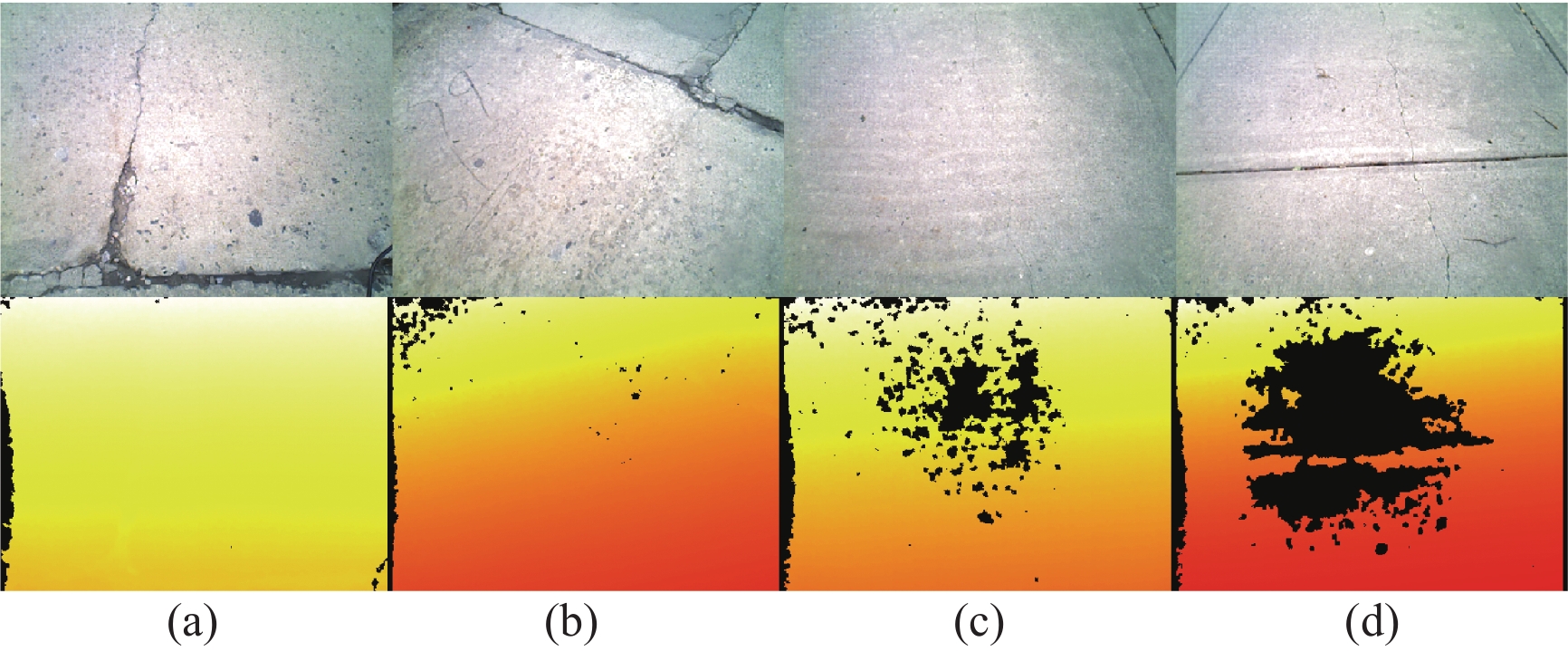
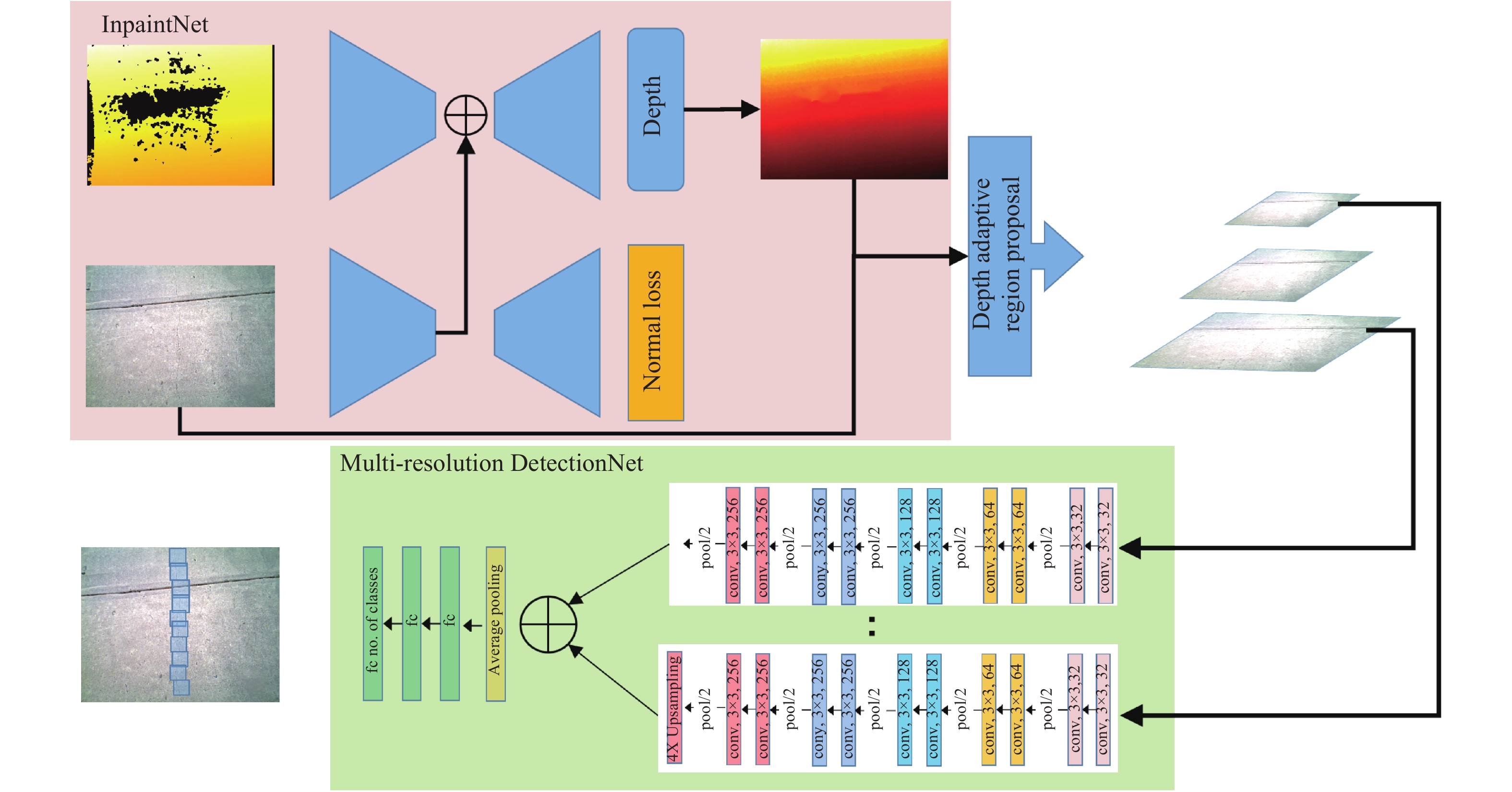
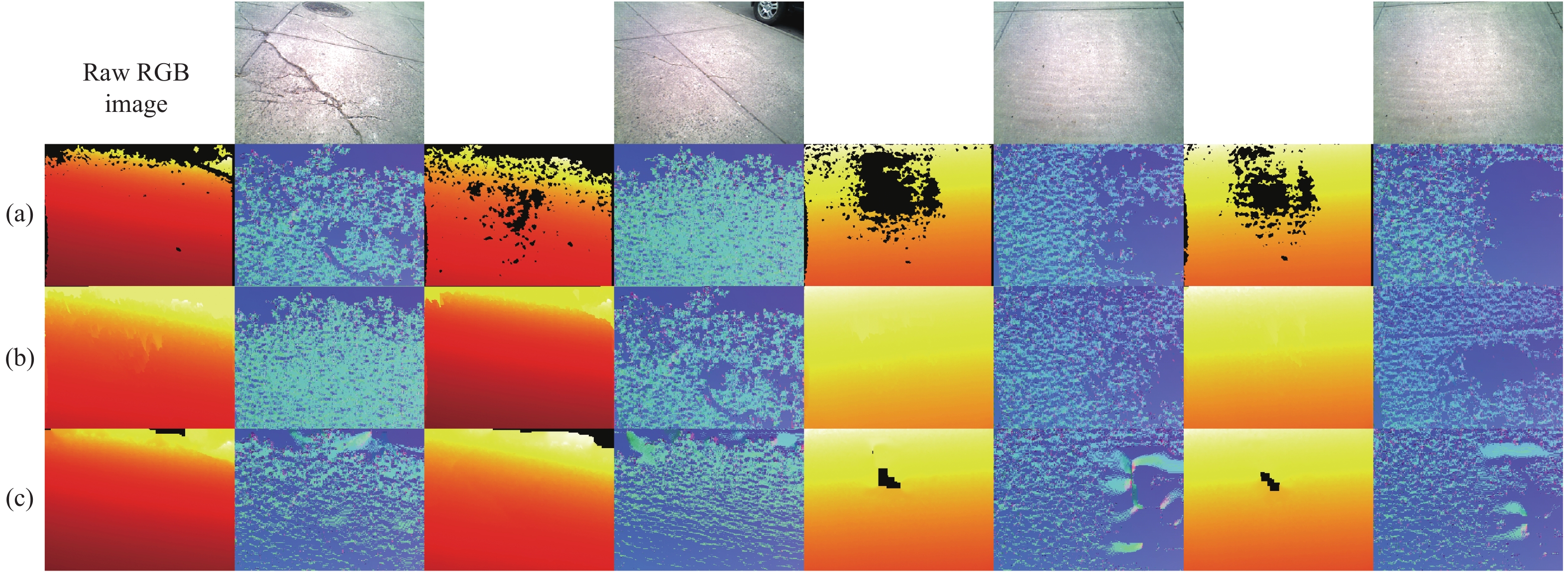
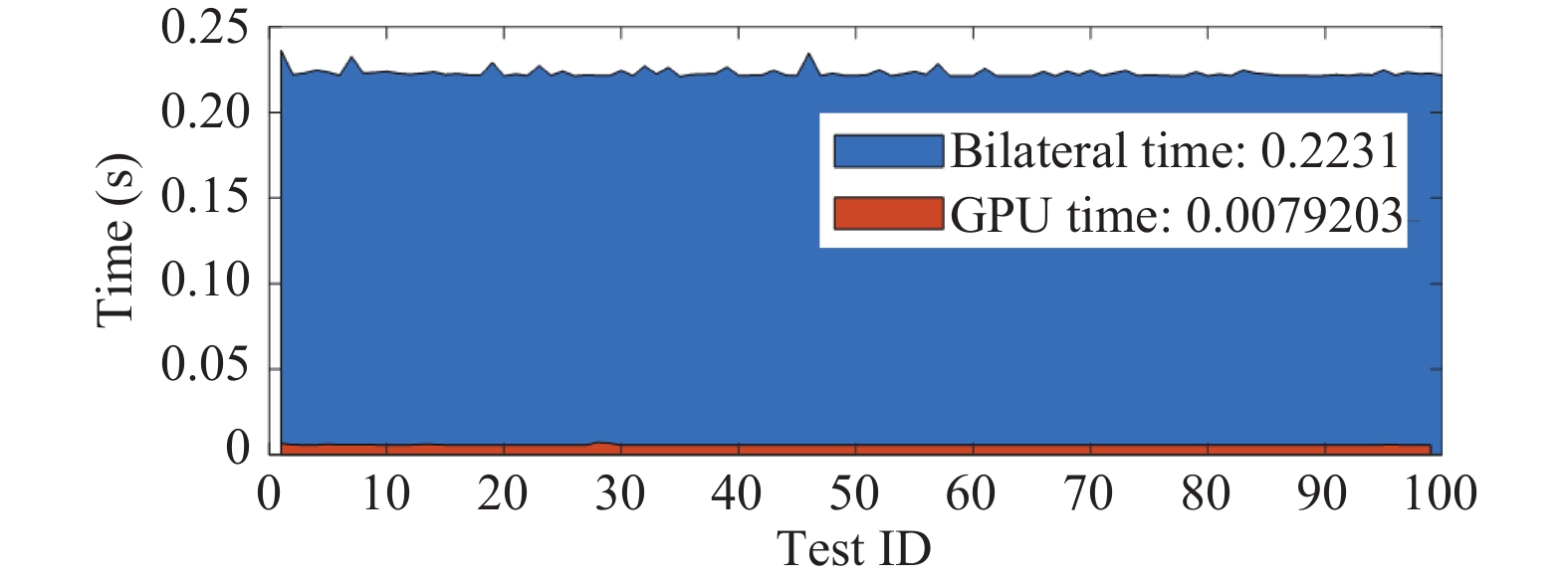
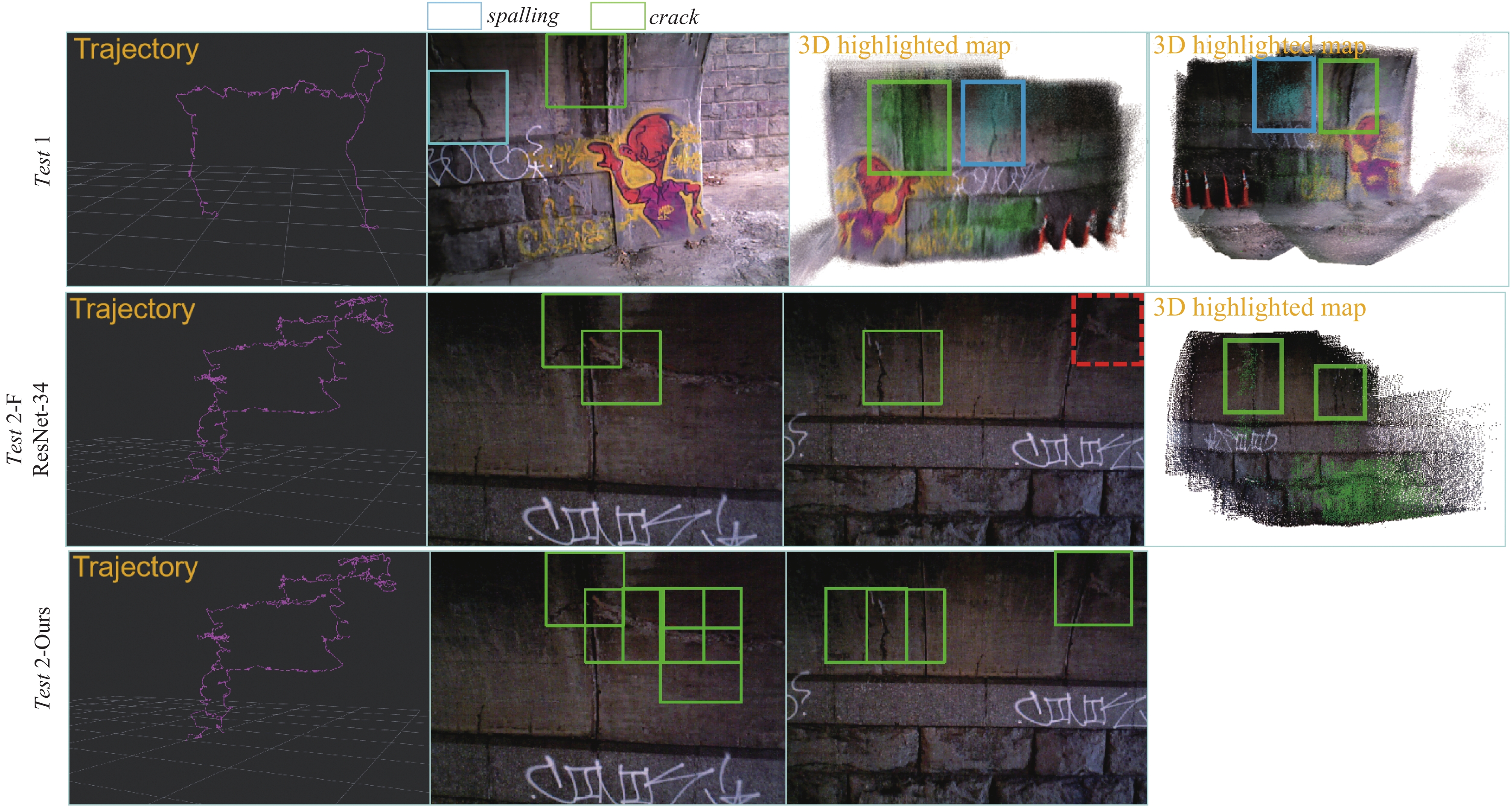
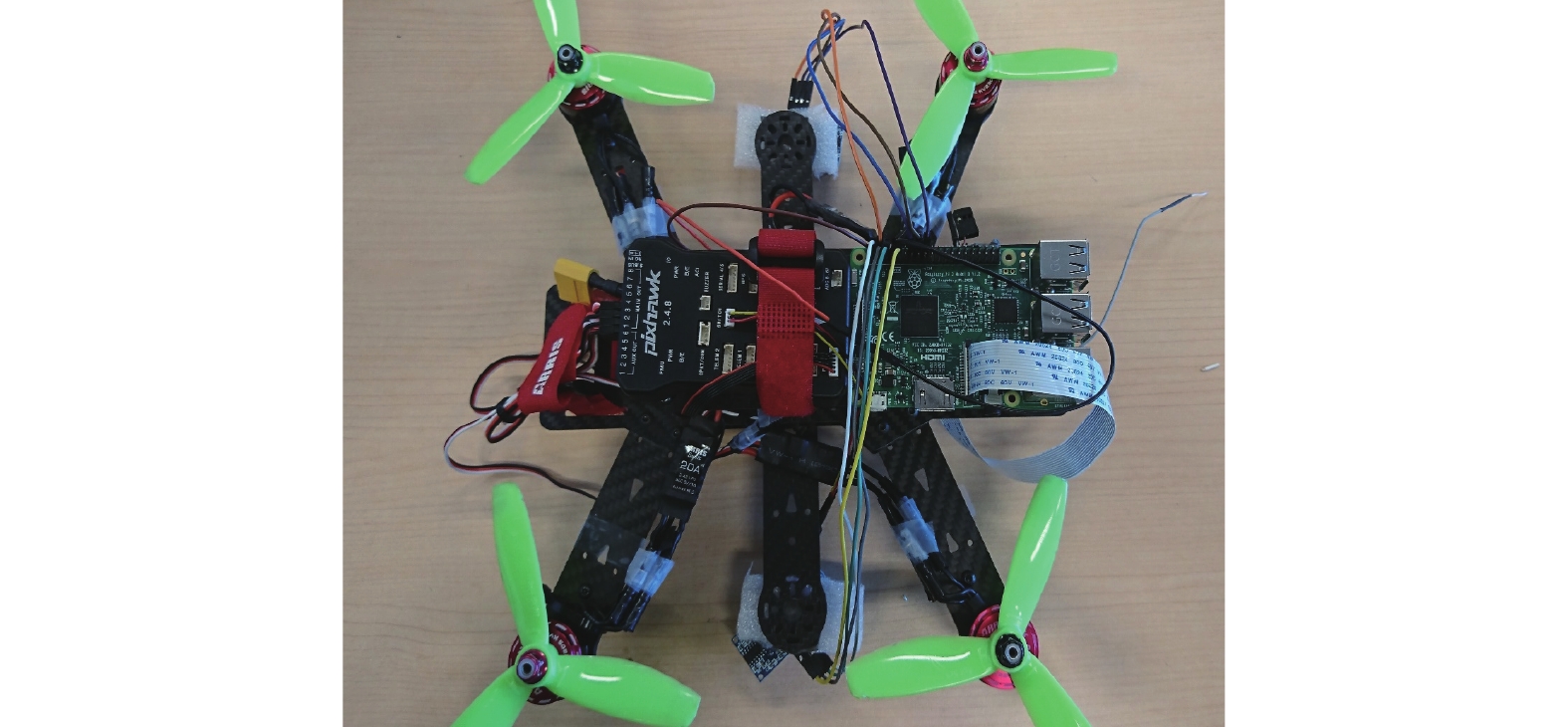
The concrete aging problem has gained more attention in recent years as more bridges and tunnels in the United States lack proper maintenance. Though the Federal Highway Administration requires these public concrete structures to be inspected regularly, on-site manual inspection by human operators is time-consuming and labor-intensive. Conventional inspection approaches for concrete inspection, using RGB image-based thresholding methods, are not able to determine metric information as well as accurate location information for assessed defects for conditions. To address this challenge, we propose a deep neural network (DNN) based concrete inspection system using a quadrotor flying robot (referred to as CityFlyer) mounted with an RGB-D camera. The inspection system introduces several novel modules. Firstly, a visual-inertial fusion approach is introduced to perform camera and robot positioning and structure 3D metric reconstruction. The reconstructed map is used to retrieve the location and metric information of the defects. Secondly, we introduce a DNN model, namely AdaNet, to detect concrete spalling and cracking, with the capability of maintaining robustness under various distances between the camera and concrete surface. In order to train the model, we craft a new dataset, i.e., the concrete structure spalling and cracking (CSSC) dataset, which is released publicly to the research community. Finally, we introduce a 3D semantic mapping method using the annotated framework to reconstruct the concrete structure for visualization. We performed comparative studies and demonstrated that our AdaNet can achieve 8.41% higher detection accuracy than ResNets and VGGs. Moreover, we conducted five field tests, of which three are manual hand-held tests and two are drone-based field tests. These results indicate that our system is capable of performing metric field inspection, and can serve as an effective tool for civil engineers.
Liang Yang, Bing Li, Wei Li, Howard Brand, Biao Jiang and Jizhong Xiao, "Concrete Defects Inspection and 3D Mapping Using CityFlyer Quadrotor Robot," IEEE/CAA J. Autom. Sinica, vol. 7, no. 4, pp. 991-1002, July 2020. doi: 10.1109/JAS.2020.1003234.




















 E-mail Alert
E-mail Alert